本文涉及知识点
向量及其线性运算
向量的概念
既有大小、又有方向的量成为向量(矢量),向量用符号a 、b 、c 或 a ⃗ , b ⃗ , c ⃗ , ⋯ \vec a,\vec b,\vec c,\cdots a ,b ,c ,⋯表示。向量 a ⃗ \vec a a 可以用一条有向线段 A ⃗ B \vec AB A B来表示,线段的长度|AB|表示 a ⃗ \vec a a 的大小,A指向B成为 a ⃗ \vec a a 的方向。自由向量,不考虑起点、终点,只考虑大小和方向的向量。本书研究自由向量。长度为0的向量成为零向量,长度为1的向量称为单位向量。与 a ⃗ \vec a a 同向的单位向量记作 a 0 a^0 a0。与 a ⃗ \vec a a 长度相同,方向相反的向量成为 a ⃗ \vec a a 的反向量,记作 − a ⃗ -\vec a −a 。
向量的加减法
向量的和 :对于向量 a ⃗ , b ⃗ \vec a,\vec b a ,b ,作有向线段 A B ⃗ \vec {AB} AB 表示 a ⃗ \vec a a ,作 B C ⃗ \vec {BC} BC 表示b,把 A C ⃗ 表示的向量 c 称为 a ⃗ 与 b ⃗ 的和,记作 c = a + b \vec {AC}表示的向量c称为\vec a与\vec b的和,记作c=a+b AC 表示的向量c称为a 与b 的和,记作c=a+b
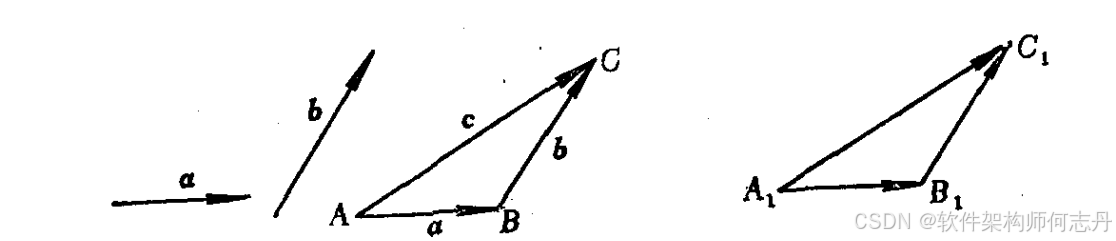
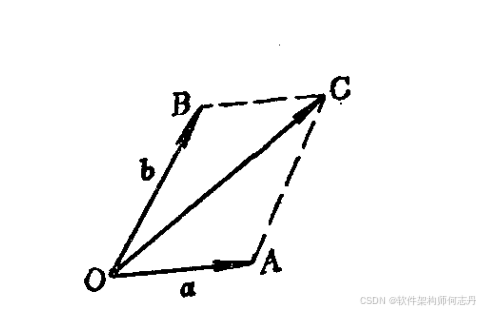
也可以用平行四边形法
向量的加法适合下述规律:
一,结合律: ( a ⃗ + b ⃗ ) + c ⃗ = a ⃗ + ( b ⃗ + c ⃗ ) (\vec a+\vec b)+\vec c=\vec a +(\vec b + \vec c) (a +b )+c =a +(b +c )。
二,交换律: a ⃗ + b ⃗ = b ⃗ + a ⃗ \vec a+\vec b=\vec b+\vec a a +b =b +a
三,对于任意向量 a ⃗ ,有 a ⃗ + 0 = a ⃗ \vec a,有\vec a+0=\vec a a ,有a +0=a 。
四,对于任意向量 a ⃗ , 有 a ⃗ + ( − a ⃗ ) = 0 \vec a,有\vec a+(-\vec a)=0 a ,有a +(−a )=0
本书用符合"A:=B"表示用B来规定A,读作"A定义成B"
向量的减法 : a ⃗ − b : = a + ( − b ) \vec a -b := a + (-b) a −b:=a+(−b)
1.3 向量的数量乘法
数乘 :实数 λ 与向量 a 的乘积 λ a ⃗ \lambda与向量a的乘积\lambda \vec a λ与向量a的乘积λa 是一个向量,它长度为:
∣ λ ∣ ∣ a ⃗ ∣ |\lambda||\vec a| ∣λ∣∣a ∣
λ > 0 ,方向和 a ⃗ 相同; λ < 0 ,方向与 a ⃗ 相反 \lambda >0,方向和\vec a相同;\lambda <0,方向与\vec a相反 λ>0,方向和a 相同;λ<0,方向与a 相反。
a 0 = ∣ a ∣ − 1 a ⃗ a^0=|a|^{-1}\vec a a0=∣a∣−1a 这成为把a单位化。
对于任意向量 a ⃗ , b ⃗ ,实数 λ , μ \vec a,\vec b,实数\lambda ,\mu a ,b ,实数λ,μ向量的数量乘法适合下述规律
1 a ⃗ = a ⃗ , ( − 1 ) a ⃗ = − a ⃗ λ ( μ a ⃗ ) = ( λ μ ) a ⃗ ( λ + μ ) a ⃗ = λ a ⃗ + μ a λ ( a ⃗ + b ⃗ ) = λ a ⃗ + λ b ⃗ 1\vec a =\vec a,(-1)\vec a=-\vec a\\ \lambda(\mu \vec a)=(\lambda \mu)\vec a\\ (\lambda+\mu)\vec a=\lambda \vec a + \mu a\\ \lambda(\vec a+\vec b)=\lambda \vec a+\lambda\vec b 1a =a ,(−1)a =−a λ(μa )=(λμ)a (λ+μ)a =λa +μaλ(a +b )=λa +λb
1.4 共线(共面)的向量组
向量的加法和数量乘法统称为向量的线性运算。
一组向量 a ⃗ 1 , a ⃗ 2 , ⋯ , a n 是一组向量,一组实数 k 1 , k 2 , ⋯ k n ,则 k 1 a 1 + k 2 a 2 + ⋯ + k n a n 一组向量\vec a_1,\vec a_2,\cdots ,a_n是一组向量,一组实数k_1,k_2,\cdots k_n,则k_1a_1+k_2a_2+\cdots +k_na_n 一组向量a 1,a 2,⋯,an是一组向量,一组实数k1,k2,⋯kn,则k1a1+k2a2+⋯+knan是一个向量,称它是向量组 a 1 , a 2 , ⋯ , a n a_1,a_2,\cdots ,a_n a1,a2,⋯,an的一个线性组合,称 k 1 , ⋯ , k n 是这个组合的系数 k_1,\cdots ,k_n是这个组合的系数 k1,⋯,kn是这个组合的系数。
定义1.4 :向量组若用同一个起点的有向线段表示后,它们在一条直线(一个平面)上,则称这个向量组是共线(共面的)。
若a与b共线,则记作 a ∥ b a \parallel b a∥b
0 ⃗ \vec 0 0 与任意向量共线;共线的向量一定共面;两个向量一定共面。
命题1.1 若 a ⃗ , b ⃗ 共线,并且 a ≠ 0 , \vec a,\vec b共线,并且a \neq 0, a ,b 共线,并且a=0,则存在唯一实数 λ ,使得 b ⃗ = λ a ⃗ \lambda,使得\vec b=\lambda \vec a λ,使得b =λa
命题1.2 a ⃗ 与 b ⃗ 共线的充分必要条件是存在不全为零的实数 λ , μ \vec a与\vec b共线的充分必要条件是存在不全为零的实数\lambda,\mu a 与b 共线的充分必要条件是存在不全为零的实数λ,μ使得
λ a ⃗ + μ b ⃗ = 0 \lambda \vec a+\mu \vec b=0 λa +μb =0
命题1.3 :若 c ⃗ = λ a ⃗ + μ b ⃗ ,则 a ⃗ , b ⃗ , c ⃗ \vec c=\lambda \vec a+ \mu \vec b,则\vec a,\vec b,\vec c c =λa +μb ,则a ,b ,c 共面。
命题1.4 :若 a ⃗ , b ⃗ , c ⃗ \vec a,\vec b,\vec c a ,b ,c 共面,并且 a ⃗ 与 b ⃗ \vec a与\vec b a 与b 不共线,则存在唯一实数 λ , μ \lambda,\mu λ,μ使得 c ⃗ = λ a ⃗ + μ b ⃗ \vec c=\lambda \vec a+\mu \vec b c =λa +μb
命题1.5 :若 a ⃗ , b ⃗ , c ⃗ \vec a,\vec b,\vec c a ,b ,c 共面的充分必要条件是有不全为零的实数 k 1 , k 2 , k 3 k_1,k_2,k_3 k1,k2,k3使得: k 1 a ⃗ + k 2 b ⃗ + k 3 c ⃗ = 0 k_1\vec a+k_2\vec b+k_3\vec c=0 k1a +k2b +k3c =0
2 仿射坐标系和直角坐标系
2.1 向量和点的仿射坐标、直角坐标
定理1.1 空间任意给定三个不共面的向量 e ⃗ 1 , e ⃗ 2 , e ⃗ 3 \vec e1,\vec e2,\vec e3 e 1,e 2,e 3,则任意一个向量 m ⃗ \vec m m 可以唯一表示成 e ⃗ 1 , e ⃗ 2 , e ⃗ 3 的线性组合 \vec e1,\vec e2,\vec e3的线性组合 e 1,e 2,e 3的线性组合。
定义1.5 空间中任意三个有次序的不共面的向量 e 1 , e 2 , e 3 e_1,e_2,e_3 e1,e2,e3称为空间中的一组基 。对于空间中任一向量 m ⃗ \vec m m ,若 m = x e 1 + y e 2 + z e 3 m=xe_1+ye_2+ze_3 m=xe1+ye2+ze3
向量 O ⃗ M \vec OM O M称为点M的定位向量(或矢径)。
定义1.5 : 空间中的一个点O和一组基 e 1 , e 2 , e 3 e_1,e_2,e_3 e1,e2,e3合在一起称为空间的一个仿射标架或放射坐标系,记作 O ; e 1 , e 2 , e 3 O;e_1,e_2,e_3 O;e1,e2,e3,其中O称为原点。
定义1.7 : 如果 e 1 , e 2 , e 3 e_1,e_2,e_3 e1,e2,e3两两垂直,并且它们都是单位向量,则 O ; e 1 , e 2 , e 3 O;e_1,e_2,e_3 O;e1,e2,e3称为一个直角标架或直角坐标系。
点(或向量)在直角坐标系中的坐标称为它的直角坐标,在仿射坐标系中的 坐标称为它的仿射坐标。
2.2 用坐标作向量的线性运算
取定仿射标架 O ; e 1 , e 2 , e 3 ,设 a 的坐标 ( a 1 , a 2 , a 3 ) , b 的坐标 ( b 1 , b 2 , b 3 ) 则 O;e_1,e_2,e_3,设a的坐标(a_1,a_2,a_3),b的坐标(b_1,b_2,b_3)则 O;e1,e2,e3,设a的坐标(a1,a2,a3),b的坐标(b1,b2,b3)则
a ⃗ + b ⃗ = a 1 e ⃗ 1 + a 2 e ⃗ 2 + a 3 e ⃗ 3 + b 1 e ⃗ 1 + b 2 e ⃗ 2 + b 3 e ⃗ 3 \vec a+\vec b=a_1\vec e_1+a_2\vec e_2+a_3\vec e_3+b_1\vec e_1+b_2\vec e_2+b_3\vec e_3 a +b =a1e 1+a2e 2+a3e 3+b1e 1+b2e 2+b3e 3
= ( a 1 + b 1 ) e ⃗ 1 + ( a 2 + b 2 ) e ⃗ 2 + ( a 3 + b 3 ) e ⃗ 3 (a_1+b_1)\vec e_1+(a_2+b_2)\vec e_2+(a_3+b_3)\vec e_3 (a1+b1)e 1+(a2+b2)e 2+(a3+b3)e 3
向量和的坐标等于对应坐标的和。
λ a ⃗ = ( λ a 1 ) e ⃗ 1 + ( λ a 2 ) e ⃗ 2 + ( λ a 3 ) e ⃗ 3 \lambda \vec a=(\lambda a_1)\vec e_1 +(\lambda a_2)\vec e_2 +(\lambda a_3)\vec e_3 λa =(λa1)e 1+(λa2)e 2+(λa3)e 3
a ⃗ − b ⃗ = ( a 1 − b 1 , a 2 − b 2 , a 3 − b 3 ) \vec a-\vec b=(a_1-b_1,a_2-b_2,a_3-b_3) a −b =(a1−b1,a2−b2,a3−b3)
定理1.2 向量的坐标等于其终点坐标减去其起点坐标。
2.3 三点(或两向量)共线的条件
定理1.3 在三个点A,B,C所在平面上取一个放射标架 O ; e 1 , e 2 O;e_1,e_2 O;e1,e2,设A,B,C的坐标分别是
( x 1 , y 1 ) , ( x 2 , y 2 ) , ( x 3 , y 3 ) , (x_1,y_1),(x_2,y_2),(x_3,y_3), (x1,y1),(x2,y2),(x3,y3),
则三点共线的充要条件是:
∣ x 1 x 2 x 3 y 1 y 2 y 3 1 1 1 ∣ = 0 \begin{vmatrix} x_1&x_2&x_3\\ y_1&y_2&y_3\\ 1&1&1\\ \end{vmatrix}=0 x1y11x2y21x3y31 =0
定理1.4 :设两向量 a ⃗ , b ⃗ \vec a,\vec b a ,b 在空间仿射标架O; e ⃗ 1 , e ⃗ 2 , e ⃗ 3 \vec e_1,\vec e_2,\vec e_3] e 1,e 2,e 3]中的坐标分别为 ( a 1 , a 2 , a 3 ) , ( b 1 , b 2 , b 3 ) (a_1,a_2,a_3),(b_1,b_2,b_3) (a1,a2,a3),(b1,b2,b3)。则 a ⃗ 与 b ⃗ \vec a与\vec b a 与b 共线的充分必要条件是:
∣ a 1 b 1 a 2 b 2 ∣ = ∣ a 1 b 1 a 3 b 3 ∣ = ∣ a 2 b 2 a 3 b 3 ∣ = 0 \begin{vmatrix}a_1 &b_1\\ a_2 & b_2\end{vmatrix}=\begin{vmatrix}a_1 &b_1\\ a_3 & b_3\end{vmatrix}=\begin{vmatrix}a_2 &b_2\\ a_3 & b_3\end{vmatrix}=0 a1a2b1b2 = a1a3b1b3 = a2a3b2b3 =0
2.4 线段的定比分点
对于线段AB( A ≠ B A\neq B A=B),如果点C满足 A C ⃗ = λ C B ⃗ \vec {AC} =\lambda \vec {CB} AC =λCB ,则称点C分线段AB成定比 λ \lambda λ。如果 λ > 0 \lambda>0 λ>0, A C ⃗ 与 C B ⃗ \vec{AC}与\vec{CB} AC 与CB 同向,点C是线段内部一点,称内分点 。当 λ < 0 \lambda <0 λ<0时, A C ⃗ 与 C B ⃗ 反向, C 是线段 A B 外部的点, \vec{AC}与\vec{CB}反向,C是线段AB外部的点, AC 与CB 反向,C是线段AB外部的点,称C为外分点;当 λ = 0 \lambda=0 λ=0时,C点与A点重合。假如 λ = − 1 ,则得 A C ⃗ = − C B ⃗ ,即 A B ⃗ = 0 ,矛盾,所以 λ ≠ − 1 \lambda=-1,则得\vec{AC}=-\vec{CB},即\vec{AB}=0,矛盾,所以\lambda\neq -1 λ=−1,则得AC =−CB ,即AB =0,矛盾,所以λ=−1
如果C在以A为起点,方向BA的射线上,则 − 1 < λ < 0 -1<\lambda<0 −1<λ<0。
如果C在以B为起点,方向AB的射线上,则 − ∞ < λ < − 1 -\infty < \lambda <-1 −∞<λ<−1
命题1.6 设A,B的坐标分别是 ( x 1 , y 1 , z 1 ) , ( x 2 , y 2 , z 2 ) (x_1,y_1,z_1),(x_2,y_2,z_2) (x1,y1,z1),(x2,y2,z2)则分线段AB成定比 λ ( λ ≠ − 1 ) 的分点坐标是 \lambda(\lambda \neq -1)的分点坐标是 λ(λ=−1)的分点坐标是
x = x 1 + λ x 2 1 + λ , y = y 1 + λ y 2 1 + λ , z = z 1 + λ z 2 1 + λ x=\frac{x_1+\lambda x_2}{1+\lambda},y=\frac{y_1+\lambda y_2}{1+\lambda},z=\frac{z_1+\lambda z_2}{1+\lambda} x=1+λx1+λx2,y=1+λy1+λy2,z=1+λz1+λz2
3 向量内积(点乘)
若力F使质点A位移S,则F做的功W为:
W = ∣ F 1 ∣ ∣ S ∣ = ∣ F ∣ ∣ S ∣ cos α W=|F_1||S|=|F||S|\cos \alpha W=∣F1∣∣S∣=∣F∣∣S∣cosα
定义1.8 若向量 a ⃗ = a ⃗ 1 + a ⃗ 2 \vec a=\vec a_1+\vec a_2 a =a 1+a 2,其中 a 1 ∥ e ⃗ , a 2 ⊥ e ⃗ , e ⃗ 是单位向量,则称 a ⃗ 1 是 a ⃗ 在方向 e 上的内射影(投影); a 2 是 a 在方向 e ⃗ 下的外投影。 a_1 \parallel \vec e,a_2 \perp \vec e,\vec e是单位向量,则称\vec a_1是\vec a在方向e上的内射影(投影);a_2是a在方向\vec e下的外投影。 a1∥e ,a2⊥e ,e 是单位向量,则称a 1是a 在方向e上的内射影(投影);a2是a在方向e 下的外投影。
定义1.9 若 a ⃗ 1 是 a ⃗ 在方向 e ⃗ (单位向量)上的内投影,则存在唯一实数 λ ,使得 a 1 = λ e ⃗ ,则这个实数 λ 被称为 a ⃗ 在 e ⃗ 上的分量,记作 Π e a ⃗ 。 若\vec a_1是\vec a在方向\vec e(单位向量)上的内投影,则存在唯一实数\lambda,使得a_1=\lambda \vec e,则这个实数\lambda被称为\vec a在\vec e上的分量,记作\Pi_e \vec a。 若a 1是a 在方向e (单位向量)上的内投影,则存在唯一实数λ,使得a1=λe ,则这个实数λ被称为a 在e 上的分量,记作Πea 。
命题1.8 设 e ⃗ 为一个单位向量,则对任意向量 a ⃗ , b ⃗ ,有 \vec e为一个单位向量,则对任意向量\vec a,\vec b,有 e 为一个单位向量,则对任意向量a ,b ,有
Π e ( a ⃗ + b ⃗ ) = Π e a ⃗ + Π e b ⃗ \Pi_e(\vec a+\vec b)=\Pi_e\vec a+\Pi_e \vec b Πe(a +b )=Πea +Πeb Π e ( λ a ⃗ ) = λ ( Π e a ) \Pi_e(\lambda \vec a)=\lambda(\Pi_e a) Πe(λa )=λ(Πea)
3.2 向量的内积的定义和性质
定义1.10 两个向量 a ⃗ 与 b ⃗ \vec a与\vec b a 与b 的内积(记作 a ⃗ ⋅ b ⃗ \vec a \cdot \vec b a ⋅b )规定为一个实数。 a ⃗ ⋅ b ⃗ : = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos < a ⃗ , b ⃗ > \vec a \cdot \vec b :=|\vec a||\vec b|\cos <\vec a,\vec b> a ⋅b :=∣a ∣∣b ∣cos<a ,b >
a ⃗ ⋅ b ⃗ = ( Π b a ⃗ ) ∣ b ∣ \vec a \cdot \vec b=(\Pi_b\vec a)|b| a ⋅b =(Πba )∣b∣
定理1.5 对于任意的向量 a ⃗ , b , c ,任意实数 λ \vec a,b,c,任意实数\lambda a ,b,c,任意实数λ,有
a ⃗ ⋅ b ⃗ = b ⃗ ⋅ a ⃗ 对称性 \vec a \cdot \vec b=\vec b \cdot \vec a 对称性 a ⋅b =b ⋅a 对称性
( λ a ) ⋅ b ⃗ = λ ( a ⃗ ⋅ b ⃗ ) 线性 (\lambda a)\cdot \vec b=\lambda (\vec a \cdot \vec b) 线性 (λa)⋅b =λ(a ⋅b )线性
( a ⃗ + c ⃗ ) ⋅ b ⃗ = a ⃗ ⋅ b ⃗ + c ⃗ + ⋅ b ⃗ 线性 (\vec a+\vec c)\cdot \vec b=\vec a \cdot \vec b+ \vec c + \cdot \vec b 线性 (a +c )⋅b =a ⋅b +c +⋅b 线性
若 a ≠ 0 ,则 a ⃗ a ⃗ > 0 正定性 若a\neq 0,则\vec a\vec a>0 正定性 若a=0,则a a >0正定性
3.3 用坐标计算向量的内积
收先取一个仿射坐标系O; e 1 , e 2 , e 3 e_1,e_2,e_3 e1,e2,e3,设 a ⃗ , b ⃗ \vec a,\vec b a ,b 的坐标分别是
( a 1 , a 2 , a 3 ) , ( b 1 , b 2 , b 3 ) ,则 (a_1,a_2,a_3),(b_1,b_2,b_3),则 (a1,a2,a3),(b1,b2,b3),则
a ⃗ ⋅ b ⃗ = ( a 1 e 1 ⃗ + a 2 e 2 ⃗ + a 3 e 3 ⃗ ) ⋅ ( b 1 e 1 ⃗ + b 2 e 2 ⃗ + b 3 e 3 ⃗ ) = a 1 b 1 e 1 ⃗ e 1 ⃗ + a 1 b 2 e 1 ⃗ e 2 ⃗ + a 1 b 3 e 1 ⃗ e 3 ⃗ = a 2 b 1 e 2 ⃗ e 1 ⃗ + a 2 b 2 e 2 ⃗ e 2 ⃗ + a 2 b 3 e 2 ⃗ e 3 ⃗ = a 3 b 1 e 3 ⃗ e 1 ⃗ + a 3 b 2 e 3 ⃗ e 2 ⃗ + a 3 b 3 e 3 ⃗ e 3 ⃗ \vec a \cdot \vec b=(a_1\vec{e_1}+a_2\vec{e_2}+a_3\vec{e_3})\cdot (b_1\vec{e_1}+b_2\vec{e_2}+b_3\vec{e_3})\\ =a_1b_1\vec{e_1}\vec{e_1}+a_1b_2\vec{e_1}\vec{e_2}+a_1b_3\vec{e_1}\vec{e_3}\\ =a_2b_1\vec{e_2}\vec{e_1}+a_2b_2\vec{e_2}\vec{e_2}+a_2b_3\vec{e_2}\vec{e_3}\\ =a_3b_1\vec{e_3}\vec{e_1}+a_3b_2\vec{e_3}\vec{e_2}+a_3b_3\vec{e_3}\vec{e_3} a ⋅b =(a1e1 +a2e2 +a3e3 )⋅(b1e1 +b2e2 +b3e3 )=a1b1e1 e1 +a1b2e1 e2 +a1b3e1 e3 =a2b1e2 e1 +a2b2e2 e2 +a2b3e2 e3 =a3b1e3 e1 +a3b2e3 e2 +a3b3e3 e3
可见只要知道基向量 e ⃗ 1 , e ⃗ 2 , e ⃗ 3 \vec e1,\vec e2,\vec e3 e 1,e 2,e 3之间的内积(9个数,实质是6个数),就可以求出任意两个向量的内积。这九个数称为称为仿射标架O; e ⃗ 1 , e ⃗ 2 , e ⃗ 3 \\vec e_1,\\vec e_2,\\vec e_3 e 1,e 2,e 3的度量参数。
如果是直角坐标系,则 e 1 , e 2 , e 3 e_1,e_2,e_3 e1,e2,e3两两垂直且是单位向量,故 e i ⋅ e i = 1 , e i ⋅ e j = 0 , i ≠ j e_i \cdot e_i=1,e_i \cdot e_j=0,i\neq j ei⋅ei=1,ei⋅ej=0,i=j
故: a ⃗ ⋅ b ⃗ = a 1 b 1 + a 2 b 2 + a 3 c 3 \vec a \cdot \vec b=a_1b_1+a_2b_2+a_3c_3 a ⋅b =a1b1+a2b2+a3c3
定理1.6 在直角坐标系中,两个向量的内积等于它们的对应坐标的乘积之和。
我们把一个向量 a ⃗ 与直角标架中的基向量 e 1 , e 2 , e 3 所成的角 α , β , γ \vec a与直角标架中的基向量e_1,e_2,e_3所成的角\alpha,\beta,\gamma a 与直角标架中的基向量e1,e2,e3所成的角α,β,γ 称为 a ⃗ 的方向角,对应余弦称为 a ⃗ 的方向余弦。 a ⃗ 的方向余弦就等于单位向量 a ⃗ 0 的直角坐标。 称为\vec a的方向角,对应余弦称为\vec a的方向余弦。\vec a的方向余弦就等于单位向量\vec a^0的直角坐标。 称为a 的方向角,对应余弦称为a 的方向余弦。a 的方向余弦就等于单位向量a 0的直角坐标。

扩展阅读
| 算法为骨,CAD为魂 |
|---|
| 亲士工具箱:支持中望CAD2024、AutoCad2013及以上,多年承接CAD项目的精华 |
| 工作中遇到的问题,可以按类别查阅鄙人的算法文章,请点击《算法与数据汇总》。 |
| 学习算法:按章节学习《喜缺全书算法册》,大量的题目和测试用例,打包下载。重视操作 |
| 活到老,学到老。明朝中后期,大约50%的进士能当上堂官(副部及更高);能当上堂官的举人只有十余人。 |
| 子墨子言之:事无终始,无务多业。也就是我们常说的专业的人做专业的事。 |
视频课程
先学简单的课程,请移步CSDN学院,听白银讲师(也就是鄙人)的讲解。
https://edu.csdn.net/course/detail/38771
如何你想快速形成战斗了,为老板分忧,请学习C#入职培训、C++入职培训等课程
https://edu.csdn.net/lecturer/6176
测试环境
操作系统:win7 开发环境: VS2019 C++17
或者 操作系统:win10 开发环境: VS2022 C++17
如无特殊说明,本算法用**C++**实现。
