目录
[一、雷达 - 相机(Lidar2Cam)标定](#一、雷达 - 相机(Lidar2Cam)标定)
[(2)步骤 1:标定板规范摆放](#(2)步骤 1:标定板规范摆放)
[(3)步骤 2:雷达端提取标定板平面点云](#(3)步骤 2:雷达端提取标定板平面点云)
[(3)步骤 3:相机端解算标定板视觉位姿](#(3)步骤 3:相机端解算标定板视觉位姿)
[二、雷达 - 本体(Lidar2Baselink)标定](#二、雷达 - 本体(Lidar2Baselink)标定)
[(2)步骤 1:基准场景整平与标定板固定摆放](#(2)步骤 1:基准场景整平与标定板固定摆放)
[(3)步骤 2:人工测量基准位姿编辑](#(3)步骤 2:人工测量基准位姿编辑)
[(4)步骤 3:雷达截取纯净标定板点云](#(4)步骤 3:雷达截取纯净标定板点云)
[(5)步骤 4:多帧点云采样优化](#(5)步骤 4:多帧点云采样优化)
[(6)步骤 5:结果落地与验证](#(6)步骤 5:结果落地与验证)
[三、雷达和相机 - 本体标定的异同](#三、雷达和相机 - 本体标定的异同)
一、雷达 - 相机(Lidar2Cam)标定
1、整体原理
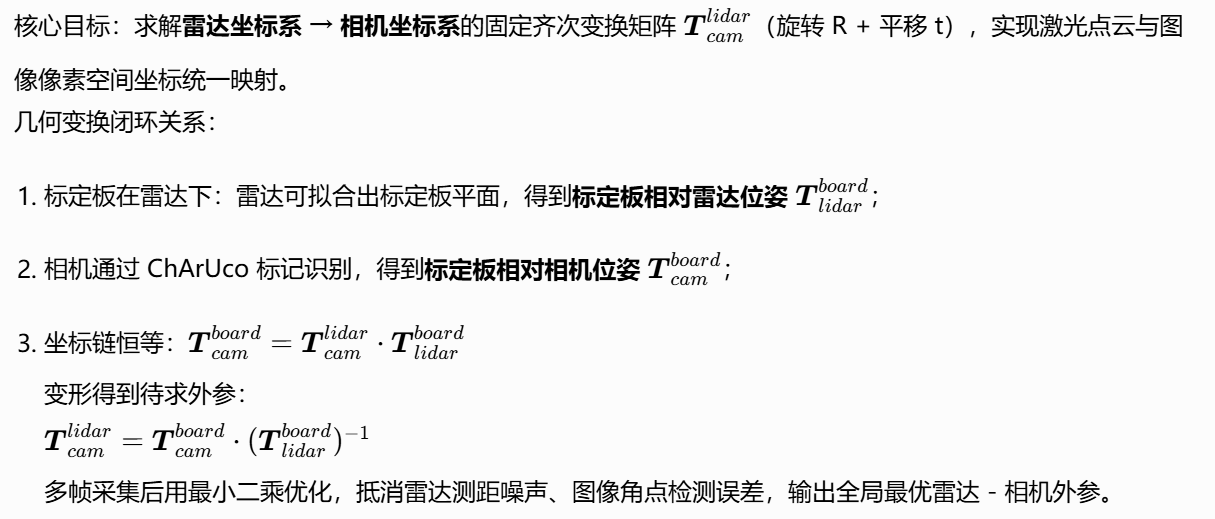
2、分步完整流程
(1)前置准备
- 相机提前完成内参 + 畸变标定(获取相机内参矩阵 K、畸变系数 dist),无准确内参会导致图像标定板位姿解算完全失真;
- 使用带 ArUco 码的 ChArUco 标定板,板面平整刚性无形变;雷达、相机均刚性固定在机器人本体,无晃动偏移。
(2)步骤 1:标定板规范摆放
将 ChArUco 标定板放置在雷达、相机共同视野内,距离设备 1.2~2m;调整支架使标定板对角线垂直地面,板面正对设备,保证雷达能打出完整板面点云、相机完整拍到整张标定板。
(3)步骤 2:雷达端提取标定板平面点云

这里的空间坐标阈值框选范围应该怎么定
- 先把雷达点云在
x/y/z三个轴上可视化,确认标定板大概处于什么范围。然后先给一个"粗框 ",把标定板连同附近少量背景一起框进来。这个框的原则是:宁可略大,不要太小 ,否则容易把板角、边缘点裁掉。CropBox/AxisAlignedBoundingBox本身就是按一个盒子来保留盒内点。 - 再在粗框结果上做"细框 "或者平面分割。对 Lidar2Cam 来说,通常先裁出标定板附近点云,再用 RANSAC 拟合平面,把最大的板面保留下来;Open3D 的
segment_plane(distance_threshold, ransac_n, num_iterations)就是干这个的。 - 如果做的是 Lidar2BaseLink,目标通常是"尽可能干净的标定板点云",所以框选范围要比 Lidar2Cam 更紧一些,重点是去掉墙面、底座、支架和地面干扰。Open3D 的裁剪接口支持按盒子直接截取点云,裁剪后再做平面提取或连通域筛选会更干净。
一个经验原则是:
- x 方向:通常对应雷达前方距离,先把板子所在的距离段圈住;
- y 方向:通常对应左右范围,给板子左右留一点余量;
- z 方向:通常对应高度,尽量只包住板子上下边界和少量误差。
如果板子朝向变化大,就不要只靠固定轴向阈值,而要先把点云转换到"板子局部坐标系"再框选。这里最好写一个上位机可视化程标定工具,对该空间坐标阈值框选范围进行框选和可视化。
(3)步骤 3:相机端解算标定板视觉位姿
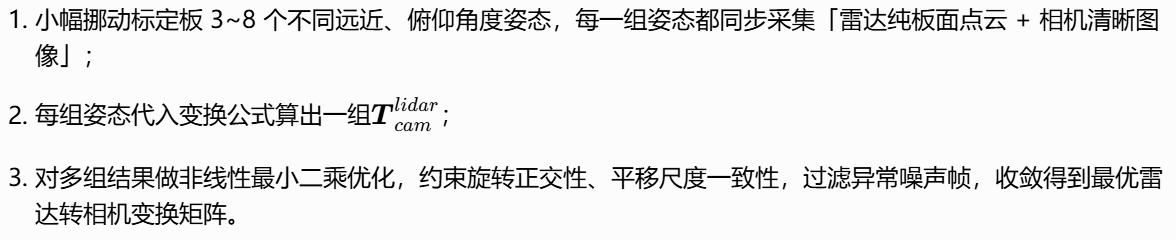
(4)多组数据采集与优化求解
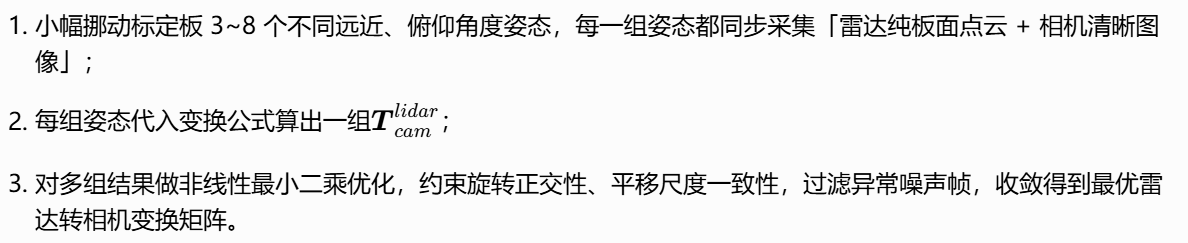
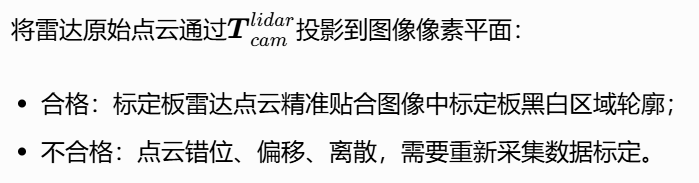
(5)标定结果校验
3、关键约束与特点
- 单姿态数学上可解,但工程必须多帧降噪;
- 雷达平面拟合精度、相机角点精度是两大误差来源;
- 标定板必须同时完整出现在雷达视场、相机视场重叠区域。
4、相关的实现代码
这里最好集成一个上位机可视化程标定工具,然后包含雷达端提取标定板平面点云(空间坐标阈值框选范围)以及标定。
二、雷达 - 本体(Lidar2Baselink)标定
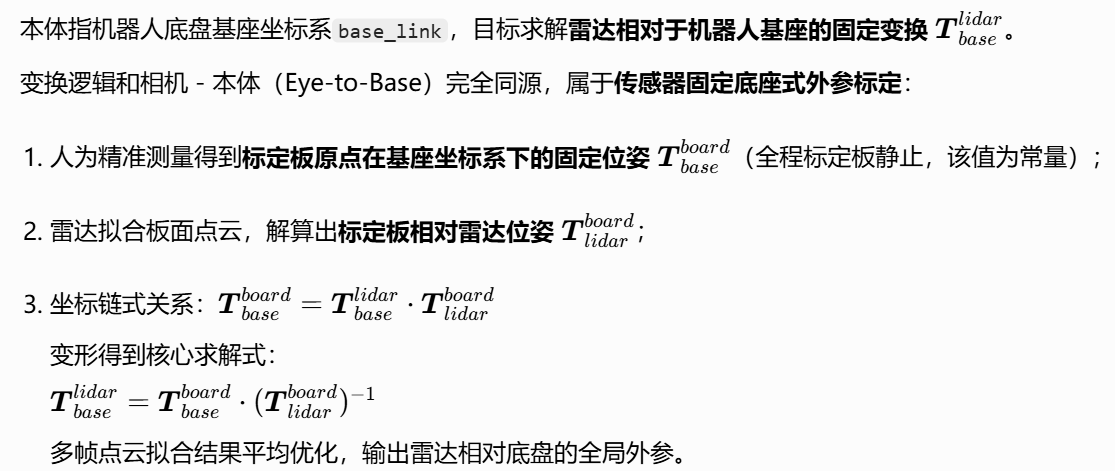
1、整体原理
2、分步完整流程
(1)前置准备
- 雷达刚性锁死在机器人机身 / 底盘,运动无位移形变;
- 沿用同一块 ChArUco 标定板,搭配激光水平仪、激光测距尺做基准测量。
(2)步骤 1:基准场景整平与标定板固定摆放
- 墙面抵靠标定板,激光水平仪对齐地面基准缝线,调平标定板姿态,保证板面竖直、中心线水平;
- 机器人整机正对标定板,激光基准线穿过底盘中心线,机器人停靠距离标定板 2~3m(比相机 - 本体标定更远),全程机器人站位不再移动。
(3)步骤 2:人工测量基准位姿

(4)步骤 3:雷达截取纯净标定板点云

这里的"雷达截取纯净标定板点云"。它的重点不是"找平面",而是尽可能只保留标定板本身,让后续你去做雷达到本体的外参求解时,点云更干净。
这类场景里,框选范围一般比 Lidar2Cam 更紧:因为你已经有了比较固定的安装场景,雷达和机器人本体的位置关系也更稳定,所以可以把板子周围的杂点压得更少。下面这个实现就是"先框选、再纯化"的写法。
这里也是最好是有一个上位机可视化程标定工具,方便进行截取纯净标定板点云。
(5)步骤 4:多帧点云采样优化

(6)步骤 5:结果落地与验证

3、相关的实现代码
这里最好集成一个上位机可视化程标定工具,然后包含雷达截取纯净标定板点云以及标定。这里的雷达 - 本体(Lidar2Baselink)标定可以和上述的雷达 - 相机(Lidar2Cam)标定做出一个通用的上位机可视化程标定工具。
三、雷达和相机 - 本体标定的异同
1、相同点

2、不同点
