电机驱动开发学习2. 直流无刷电机工作原理
- 一、直流无刷电机驱动模型
- 二、无传感器的启动方式
-
- [1. 三段式启动(Three-Stage Startup)](#1. 三段式启动(Three-Stage Startup))
- [2. 高频注入启动(High Frequency Injection, HFI)](#2. 高频注入启动(High Frequency Injection, HFI))
- 三、无刷电机的换向
一、直流无刷电机驱动模型
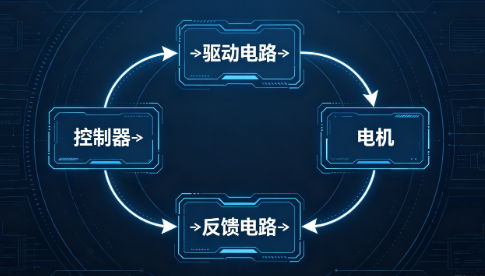
1. 从反馈电路的区分电机类型
从前一章节知道根据反馈信号来区分电机,其中反馈信号是方波为BLDC,反馈信号是正弦波是PMSM。不同的反馈信号控制策略会有不同。但二者都需要获取转子的位置信息。根据获取位置的方法不同,分为有传感器和无传感器两种方式。使用传感器的方式有分为多种。
(1)霍尔传感器
霍尔传感器是 BLDC 电机中最常用的位置传感器。它利用霍尔效应:当永磁体转子经过时,霍尔元件感应磁场方向变化,输出高低电平的数字信号,从而判断转子当前所处的电角度区间。
安装与输出
三相 BLDC 电机通常安装 3 个霍尔传感器 ,在定子上沿圆周方向相隔 120° 电角度 分布,分别对应 U、V、W 三相绕组的位置关系。每个霍尔传感器输出一路数字信号,3 路信号组合共有 2³ = 8 种状态,其中 6 种有效、2 种无效(通常对应转子处于扇区边界附近)。
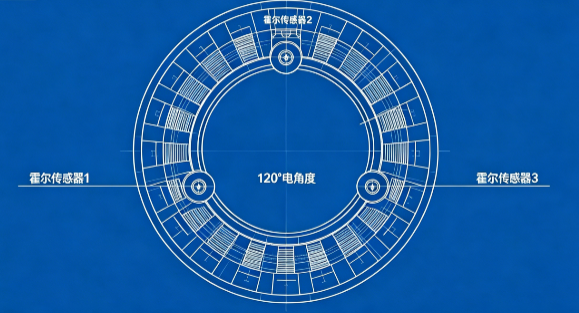
转子每转过一对磁极(一个电周期),霍尔信号按固定顺序变化 6 次 ,对应 六步换相(120° 换相) 的 6 个扇区。控制器根据当前霍尔状态查表,决定哪两相绕组通电、哪一相浮空,从而驱动转子持续旋转。
霍尔状态与换相示意
| 霍尔 C | 霍尔 B | 霍尔 A | 有效扇区 | 典型通电相 |
|---|---|---|---|---|
| 0 | 0 | 1 | 1 | U+ V- |
| 0 | 1 | 1 | 2 | W+ V- |
| 0 | 1 | 0 | 3 | W+ U- |
| 1 | 1 | 0 | 4 | V+ U- |
| 1 | 0 | 0 | 5 | V+ W- |
| 1 | 0 | 1 | 6 | U+ W- |
上表仅为示意,实际高低电平与相序、霍尔安装极性、驱动极性有关,需结合电机 datasheet 或实测波形确认。
特点
- 优点:成本低、接口简单(3 路 GPIO 或专用霍尔接口)、换相逻辑清晰,适合启动力矩要求不高、转速中低速的应用。
- 缺点 :只能提供 60° 电角度分辨率的位置信息,无法像编码器那样连续测速或做高精度闭环;高速时换相精度有限,且需预留霍尔安装空间与布线。
因此,霍尔方案多见于风扇、水泵、电动工具等对成本敏感、控制精度要求适中的 BLDC 场合;若需更高性能,会改用磁编码器 、光栅编码器 或无感估算等方式获取更精细的位置与速度信息。
(2)磁编码器
磁编码器在电机轴端安装磁环 (多对磁极或格雷码磁图案),定子侧用霍尔、AMR 或 TMR 等磁敏元件读取磁场变化,将转子位置转换为电信号。相比 3 路离散霍尔,它能提供连续、高分辨率的角度信息,是 FOC 矢量控制、伺服闭环中常用的位置反馈方案。
工作原理与信号
- 增量式:磁环上均匀分布 N/S 极对,传感器输出两路相位差 90° 的方波(A、B 相),控制器通过边沿计数得到位置,并可推算速度;通常还有 Z 相(每转一个索引脉冲)用于机械零点标定。
- 绝对式:磁环按格雷码等方式编码,上电即可读出当前绝对角度,无需回零寻 Z 相,适合断电后仍需记住位置的场景。
常见输出接口有 ABZ 数字脉冲、SPI、SSI 等,线数从数百 PPR 到数万 PPR 不等(经 4 倍频后分辨率更高)。
特点
- 优点:分辨率高、可连续测速、支持正弦波换相与高精度电流环;结构相对紧凑,对油污、灰尘的耐受性优于光栅方案。
- 缺点:成本高于霍尔;强外磁场、安装偏心或气隙不均会影响精度;绝对式磁编价格通常更高。
磁编码器广泛用于伺服电机、云台、机器人关节、无人机云台等需要平滑力矩与精确速度/位置控制的 BLDC / PMSM 系统。
(3)光栅编码器
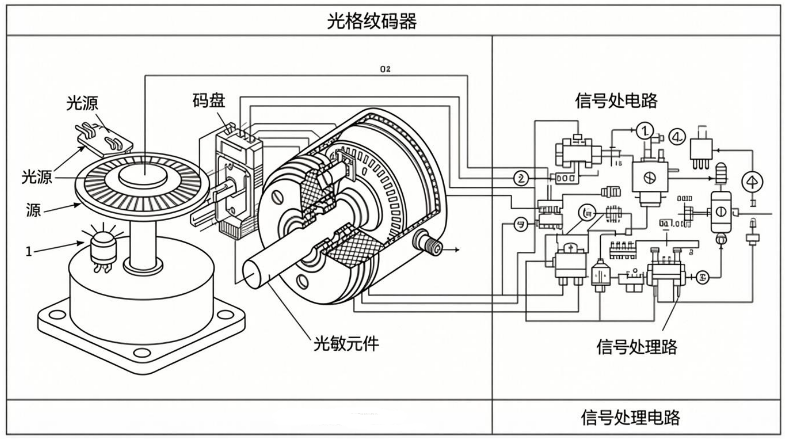
光栅编码器(光电编码器)通过码盘 + 光源 + 光敏元件 工作:码盘上刻有等间距的透光缝,转子带动码盘旋转时,光电管产生与转角成比例的脉冲串,从而得到位置与速度信息。按码盘类型分为增量式 和绝对式 ,按安装方式分为电机轴端和**负载端(外置)**两种。
工作原理与信号
光源(LED 或红外管)照射码盘,透光缝使接收管通断,输出 A、B 两路正交方波;部分型号带 Z 相索引。绝对式光编在码盘上布置多圈格雷码或细分光栅,直接输出多位并行或串行绝对角度。
光栅线数(每转脉冲数)可达数千甚至数万,经 4 倍频后角分辨率远高于霍尔,是目前测量精度最高的编码器类型之一。
特点
- 优点:精度高、重复性好、动态响应快,适合高速高精伺服与精密定位。
- 缺点:成本较高;码盘与光学通道怕油污、灰尘、振动;体积与安装要求相对严格,恶劣工况下可靠性不如磁编。
光栅编码器常见于数控机床、半导体设备、高精度伺服驱动器、测量仪器 等对定位精度要求极高的场合。实际选型时,常在**磁编(性价比、抗污染)与 光编(极限精度)**之间权衡。
2. 无传感器
简介
无传感器控制(Sensorless Control)是指不使用物理位置传感器(如霍尔、编码器),而是通过检测电机的电气信号(电压、电流)或反电动势特性,利用算法估算转子位置和速度的控制方式,即**"用算法代替硬件"**:
- 有传感器方案:通过霍尔、磁编、光编等物理器件直接测量转子位置
- 无传感器方案:通过数学模型和观测器算法,从可测量的电压、电流中推算出转子位置
无传感器控制的主要方法
根据估算原理不同,常见的无传感器控制技术包括:
1. 反电动势过零检测法(Back-EMF Zero Crossing)
- 原理:检测未通电相的反电动势过零点,推断转子位置
- 适用:梯形波驱动的BLDC电机
- 特点:简单实用,但仅适用于中高速,低速性能差
2. 反电动势积分法(Third Harmonic / EMF Integration)
- 原理:对反电动势进行积分处理,提取位置信息
- 适用:BLDC和PMSM
- 特点:比过零检测更平滑,但仍依赖反电动势幅值
3. 滑模观测器(Sliding Mode Observer, SMO)
- 原理:基于电机数学模型构建滑模观测器,估算反电动势和转子位置
- 适用:PMSM的FOC控制
- 特点:鲁棒性强,对中高速性能优异,是目前工业应用最广泛的方案之一
4. 扩展卡尔曼滤波(Extended Kalman Filter, EKF)
- 原理:将转子位置和速度作为状态变量,通过卡尔曼滤波最优估计
- 适用:高精度伺服系统
- 特点:精度高、抗噪声能力强,但计算量大,对处理器要求高
5. 高频注入法(High Frequency Injection, HFI)
- 原理:向电机注入高频电压信号,通过响应电流解调出转子位置
- 适用:零速和低速工况,特别适合凸极式PMSM(IPM)
- 特点:可实现零速启动和全速域控制,但会增加噪声和损耗
6. 模型参考自适应(Model Reference Adaptive System, MRAS)
- 原理:构建参考模型和可调模型,通过误差自适应调整估算位置
- 适用:PMSM速度控制
- 特点:对参数变化有一定适应性,实现相对简单
二、无传感器的启动方式
由于转子的磁场切割定子的线圈时,才会产生反电动势,所以检测到反电动势的条件是电机需要达到一定的速度 。
无传感器的启动方式一般有两种,三段式启动 和高频注入启动。
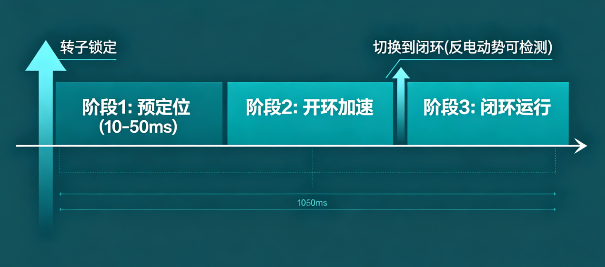
1. 三段式启动(Three-Stage Startup)
三段式启动是最经典、应用最广泛的无传感器启动方法,特别适用于BLDC电机。其核心思想是**"先强行拖动,再检测反电动势,最后闭环运行"**。
三个阶段详解
第一阶段:转子预定位(Rotor Alignment)
- 目的:将静止的转子固定到已知的初始位置
- 方法:给定子某一相通入直流电流(如U相正、V相负),产生固定磁场,使转子永磁体对齐到该磁场方向
- 时间:通常持续10-50ms,确保转子完全稳定
- 特点 :
- 会产生较小的反向转动(取决于上次停机位置)
- 启动转矩较大,可能引起机械冲击
- 对于某些应用(如风扇),可以跳过此阶段直接加速
第二阶段:开环加速(Open-Loop Acceleration / Ramp-up)
- 目的:将电机从静止加速到能够可靠检测反电动势的最低转速
- 方法 :
- 按照预设的换相序列(六步换相表)依次切换通电相
- 逐步缩短换相间隔时间,实现加速
- 通常采用线性加速或S曲线加速策略
- 关键参数 :
- 起始频率:通常5-20Hz,对应较低转速
- 加速斜率:根据负载惯量调整,过快会失步,过慢延长启动时间
- 切换阈值:达到反电动势可检测的最低转速(通常为额定转速的5%-10%)
- 挑战 :
- 开环状态下无法获知实际转子位置,可能出现失步
- 需要根据负载特性仔细调参
- 重载启动困难,可能需要更大的加速转矩
第三阶段:闭环运行(Closed-Loop Operation)
- 目的:切换到基于反电动势估算的闭环控制
- 切换条件 :
- 反电动势幅值超过检测阈值
- 电机转速达到最低稳定运行速度
- 位置估算信号信噪比满足要求
- 方法 :
- 启用反电动势过零检测或观测器算法
- 根据估算的转子位置进行换相
- 加入速度环PI调节,实现稳速控制
- 特点 :
- 进入正常运行状态,可根据负载自动调节
- 若切换失败(如加速不足),需重新回到第一阶段
三段式启动时序图
这种方式有比较明显的缺点
- ✗ 启动过程有轻微反转(预定位阶段)
- ✗ 开环加速阶段可能失步,可靠性受限
- ✗ 不适合频繁启停的应用
- ✗ 零速或极低速无法运行
- ✗ 启动时间较长(通常几百毫秒)
- ✗ 重载启动困难
2. 高频注入启动(High Frequency Injection, HFI)
高频注入是一种更先进的无传感器启动技术,特别适用于PMSM电机的FOC控制,可以实现零速启动 和全速域运行。
基本原理
核心思想:利用电机的凸极效应(Salient Pole Effect)
- 凸极电机(如IPM内嵌式永磁电机):直轴电感Ld ≠ 交轴电感Lq
- 向定子绕组注入高频电压信号(通常100-1000Hz)
- 高频电流响应会受到转子位置调制
- 通过解调高频电流,提取转子位置信息
工作流程
1. 高频信号注入
- 在基波控制电压上叠加高频旋转电压矢量或脉振电压
- 注入频率远高于电机基波频率,避免干扰正常运行
- 注入幅值较小,通常不超过额定电压的5%-10%
2. 电流响应采集
- 采样三相电流,提取高频分量
- 使用带通滤波器分离高频响应电流
3. 位置解调
-
通过锁相环(PLL)或反正切运算解调出转子位置
-
利用Ld和Lq的差异,高频电流幅值随转子位置周期性变化
-
计算公式示例:
θ_est = 0.5 × arctan(Ih_q / Ih_d)其中Ih_d、Ih_q为高频电流在d-q轴的分量
4. 平滑切换
- 低速区(0-10%额定转速):纯HFI控制
- 中高速区(>10%额定转速):切换到反电动势观测器(如SMO)
- 过渡区采用加权混合,避免切换冲击
这种方式有以下优点:
- ✓ 零速启动:可在转子完全静止时获取位置
- ✓ 无反转:无需预定位,直接正向启动
- ✓ 全速域覆盖:从零速到高速连续可控
- ✓ 高精度:位置估算精度可达±5°电角度以内
- ✓ 动态性能好:适合频繁启停和快速变速
也存在一些缺点:
- ✗ 仅适用于凸极电机:SPM(表贴式)效果差,IPM效果好
- ✗ 增加损耗和噪声:高频注入引起额外铜损和铁损
- ✗ 算法复杂:需要数字滤波、解调等运算
- ✗ 对处理器要求高:需要高性能MCU或DSP
- ✗ 参数敏感:Ld、Lq参数变化影响精度
三、无刷电机的换向
1. 什么是换向?
**换向(Commutation)**是指按照转子位置的变化,依次切换定子绕组的通电状态,使定子产生的磁场始终超前或滞后于转子磁场一个固定角度,从而产生持续的电磁转矩。
简单来说:换向就是决定什么时候给哪两相通电。
- 有刷电机:通过机械换向器和电刷自动完成换向
- 无刷电机:通过控制器根据位置信号电子换向
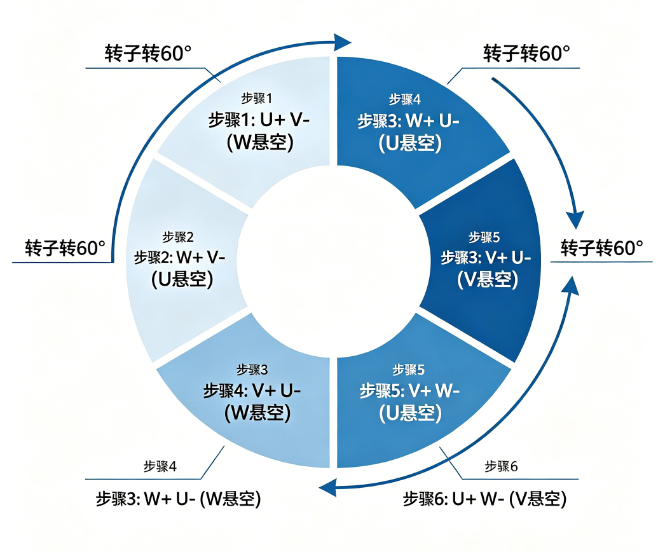
2. 六步换相法(最常用)
三相BLDC电机最常用的换向方式是六步换相(也叫120°换相),每个电周期分为6个步骤。
基本原理
- 三相绕组(U、V、W),每次只有两相通电,一相悬空
- 每步持续60°电角度,6步完成一个360°电周期
- 根据霍尔传感器或估算的转子位置,查表确定当前应该哪两相通电
换相表
| 步骤 | 霍尔状态 | 通电相 | 电流路径 | 对应扇区 |
|---|---|---|---|---|
| 1 | 001 | U+ V- | U→V | 0°-60° |
| 2 | 011 | W+ V- | W→V | 60°-120° |
| 3 | 010 | W+ U- | W→U | 120°-180° |
| 4 | 110 | V+ U- | V→U | 180°-240° |
| 5 | 100 | V+ W- | V→W | 240°-300° |
| 6 | 101 | U+ W- | U→W | 300°-360° |
说明:U+表示U相上桥臂导通(接正极),V-表示V相下桥臂导通(接负极)
换相过程示意
3. 换向的关键要点
换向时机
- 提前换向:在到达理论换相点之前提前切换,补偿电感延迟
- 滞后换向:延后切换,适用于某些特殊工况
- 准确换向:理想状态,转矩脉动最小
死区时间(Dead Time)
为什么需要死区?
- 防止同一相的上桥臂和下桥臂同时导通(会短路!)
- MOSFET开关不是瞬间完成,需要过渡时间
典型值:100ns - 2μs,根据MOSFET特性调整
换向引起的转矩脉动
原因:
- 六步换相是离散的,磁场跳跃式变化
- 非导通相的反电动势影响
- 电流建立和衰减需要时间
改善方法:
- 使用FOC正弦波驱动替代六步换相
- 优化换相提前角
- 采用更高性能的电流控制
4. 换向与转速的关系
转速计算公式:
n = (120 × f) / p
其中:
n = 转速(rpm)
f = 换相频率(Hz)
p = 电机极对数举例:
- 4极电机(p=2),换相频率100Hz
- 转速 n = (120 × 100) / 2 = 6000 rpm
实际意义:
- 换相频率越高,转速越快
- 控制器必须能够跟上所需的换相频率
- 高速运行时,换向延迟的影响更明显
5. 正弦波控制
基本概念
正弦波控制是指给定子三相绕组通入正弦交流电流,使定子产生平滑旋转的磁场,而非六步换相的跳跃式磁场。
- 方波驱动(六步换相):电流为梯形波,磁场离散切换
- 正弦波驱动:电流为正弦波,磁场连续旋转
主要特点
优点:
- ✓ 转矩平稳,脉动小
- ✓ 运行噪声低
- ✓ 效率高(尤其在中高速)
- ✓ 适合精密控制
缺点:
- ✗ 控制算法复杂(需要FOC矢量控制)
- ✗ 需要高分辨率位置反馈(编码器)
- ✗ 对处理器性能要求高
实现方式
**FOC(磁场定向控制)**是实现正弦波控制的主流方法:
- 通过Park变换将三相电流转换到d-q旋转坐标系
- 分别控制d轴电流(励磁)和q轴电流(转矩)
- 通过SVPWM生成三相正弦PWM波形
- 实现精确的转矩和速度控制