短文标题: PWM 调压调速,H桥换向:直流电机四象限控制
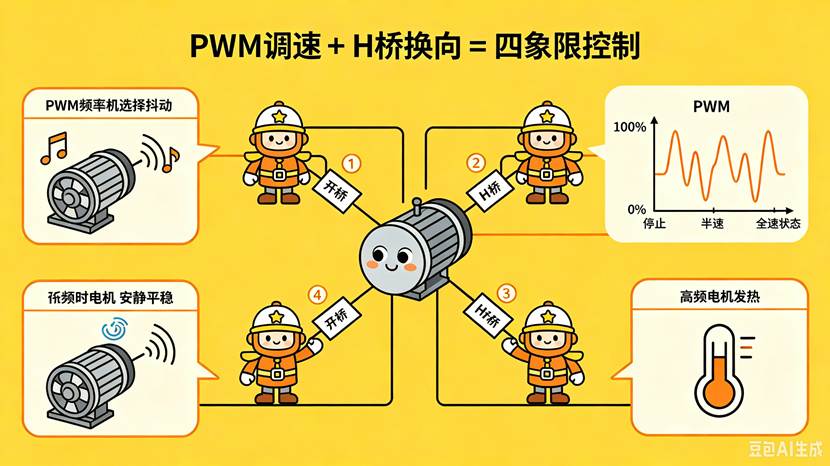
你有没有想过一个问题:想让直流电机不仅转得快慢可调,还要能正转、反转、急停,怎么用一套电路实现?PWM调压调速 + H桥换向 。这就是直流电机的四象限控制。PWM调速原理,直流电机转速与平均电压成正比。
- 占空比100%:全速
- 占空比50%:半速
- 占空比0%:停止
PWM频率选择:低频(<1kHz)电机抖动、人耳听到啸叫;中频(10kHz~20kHz)静音,主流选择;高频(>50kHz)开关损耗增加,效率下降。电机的机械惯性对高频PWM响应不足,实际有效的是平均电压。
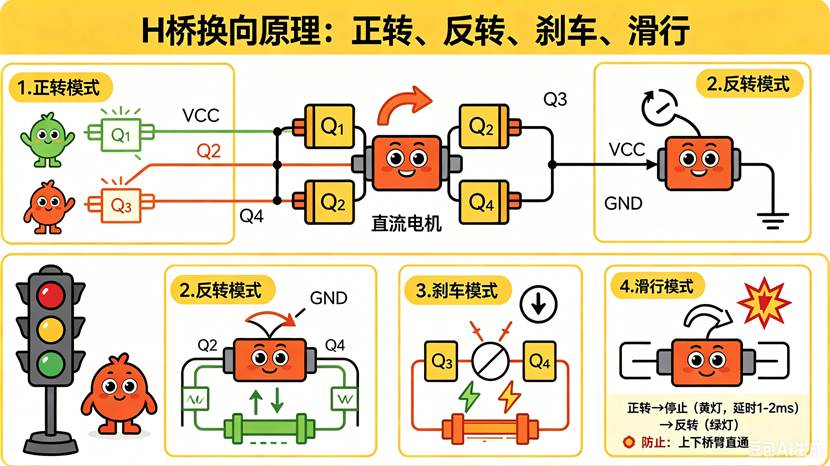
**H桥换向原理,**H桥由4个开关管(MOS管)组成:Q1左上、Q2右上、Q3左下、Q4右下。
- 正转:Q1和Q4导通,电流 VCC→Q1→电机→Q4→GND
- 反转:Q2和Q3导通,电流 VCC→Q2→电机→Q3→GND
- 刹车(反接制动):Q3和Q4导通,电机两端短路,惯性产生的反电动势形成制动扭矩
- 滑行:所有管关断,电机自由停止
正转和反转的电流方向相反,通过不同对角的开关导通实现。调速+换向组合,
- 正转调速:Q1常开,Q4接PWM,Q2/Q3关
- 反转调速:Q2常开,Q3接PWM,Q1/Q4关
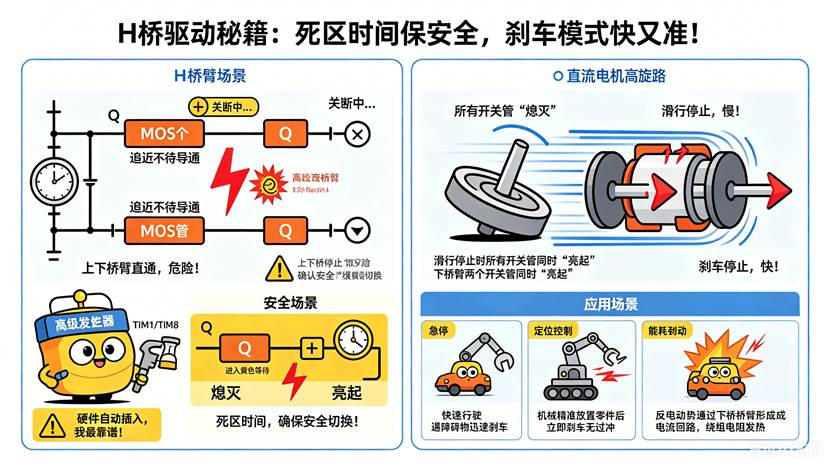
换向时不能直接切换:正转切换到反转时,应先关断所有管,等待电流衰减(延时1-2ms,确保MOS管完全关断),再按反转模式导通,防止上下桥臂直通烧管。
死区时间的重要性, H桥驱动中,上下桥臂不能同时导通。MOS管关断需要时间(几十到几百纳秒)。死区时间:在上管关断后,等待一段时间再导通下管,确保上管已完全关断。高级定时器(TIM1/TIM8)内置死区发生器,硬件自动插入死区,无需软件操心。
**刹车模式的应用,**刹车(下桥臂同时导通)比滑行停止快得多,适合急停、定位控制、紧急制动。
- 急停:瞬间刹车
- 定位控制:位置到达后刹车,防止过冲
- 能耗制动:刹车时电机变成发电机,反电动势通过下桥臂形成电流回路,能量在绕组电阻上消耗
集成H桥芯片 vs 分立MOS管
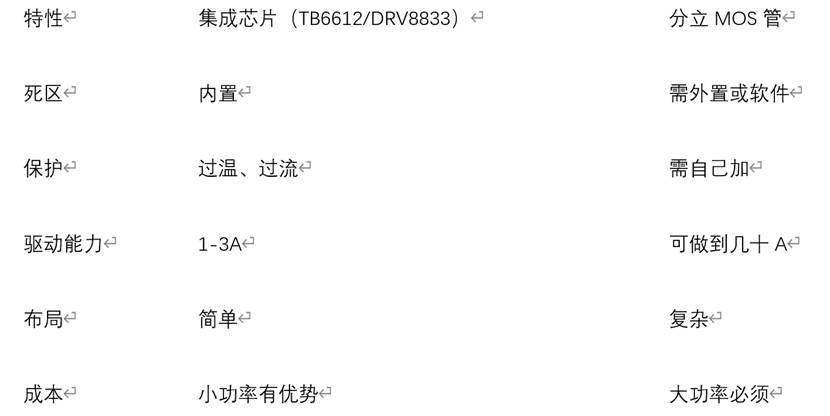
小功率选集成芯片,大功率选分立MOS管+栅极驱动IC。
这个故事的启示,PWM调压 + H桥换向 = 直流电机四象限控制。 PWM控制"多快",H桥控制"哪边"。两者结合,电机指哪转哪,快慢由人。写在最后, 直流电机控制不是简单的"通电就转"。PWM调速度,H桥换方向,刹车急停。三招合一,电机乖乖听话。
(本文灵感源于于振南《新概念ARM32单片机》教程第6.12节"PWM电机调速与H桥控制"。)
觉得有用?点赞、转发,让更多人看懂PWM+H桥的电机控制逻辑。