1、Laplacian算子
Laplacian(拉普拉斯)算子是一种二阶导数算子,其具有旋转不变性,可以满足不同方向的图像边缘锐化(边缘检测)的要求。同时,在图像边缘处理中,二阶微分的边缘定位能力更强,锐化效果更好,因此在进行图像边缘处理时,直接采用二阶微分算子而不使用一阶微分。
通常情况下,其算子的系数之和需要为零。 Laplacian算子具有各方向同性的特点,能够对任意方向的边缘进行提取,具有无方向性的优点,因此使用Laplacian算子提取边缘不需要分别检测X方向的边缘和Y方向的边缘,只需要一次边缘检测即可。Laplacian算子是一种二阶导数算子,对噪声比较敏感,因此常需要配合高斯滤波一起使用。
Laplacian使用的卷积核如下:

像素点的近似导数值计算:
左图是 Laplacian 算子,右图是一个简单图像,其中有 9 个像素点。

计算像素点 P5 的近似导数值,如下:
P5 = (P2 + P4 + P6 + P8) - 4*P5
下面是一些实际计算的例子:
在左图中,像素点 P5 与周围像素点的值相差较小,得到的计算结果值较小,边缘不明显。
在中间的图中,像素点 P5 与周围像素点的值相差较大,得到的计算结果值较大,边缘较明显。
在右图中,像素点 P5 与周围像素点的值相差较大,得到的计算结果值较大,边缘较明显。

需要注意,在上述卷积核与图像进行卷积运算后,计算结果的值可能为正数,也可能为负数。所以,需要对计算结果取绝对值,以保证后续运算和显示都是正确的。
opencv之Laplacian接口调用:
cpp
void Laplacian( InputArray src, OutputArray dst, int ddepth,
int ksize = 1, double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT );src:输入图像,可以是任意通道数的图像,但通常是单通道灰度图像。
dst:输出图像,与输入图像src具有相同的尺寸和通道数
ddepth:输出图像的深度,若src为CV_8U,则可取-1/CV_16S/CV_32F/CV_64F;若src为CV_16U/CV_16S,可取-1/CV_32F/CV_64F;若src为CV_32F,可取-1/CV_32F/CV_64F;若src为CV_64F,可取-1/CV_64F。,当赋值为-1时,输出图像的数据类型自动选择。
ksize:用于计算二阶导数的核尺寸大小,必须为正奇数。
scale:对导数计算结果进行缩放的缩放因子,默认系数为1,表示不进行缩放。也称对比度
delta:偏值,在计算结果中加上偏值。也称亮度
borderType:像素外推法选择标志,默认参数为BORDER_DEFAULT,表示不包含边界值倒序填充。
ddepth说明:
ddepth 参数表示输出图像的深度,即输出图像的数据类型。它决定了输出图像中像素值的数据范围和存储格式。
常见的选项包括:
CV_8U:8位无符号整数,表示范围为 0, 255。
CV_16U:16位无符号整数,表示范围为 0, 65535。
CV_16S:16位有符号整数,表示范围为 -32768, 32767。
CV_32F:32位浮点数。
CV_64F:64位浮点数。
选择合适的深度类型取决于你的应用和对图像数据的要求。例如,如果你希望保留边缘检测操作中的负值,可能会选择使用浮点数类型(如 CV_64F),因为它可以存储负数。如果你只关心边缘的存在与否而不关心边缘的方向,那么使用无符号整数类型可能更合适。
在Laplacian算子中,通常选择 CV_16S 或 CV_64F 作为 ddepth,因为Laplacian操作可能产生负值,而这些负值在 CV_8U 类型中会被截断为零。在显示图像之前,通常需要对结果进行取绝对值(cv::abs())并进行数据类型转换。
下面代码为使用拉普拉斯检测边缘的一个demo:
cpp
#include <opencv2/opencv.hpp>
#include <iostream>
int main()
{
//载入原始图
Mat src = imread("1.jpg");
//【1】定义变量
Mat src_gray, dst, abs_dst;
//【2】显示原图
imshow("原始图", src);
//【3】使用高斯滤波消除噪声
GaussianBlur(src, src, Size(3, 3), 0);
//【4】转为灰度图
cvtColor(src, src_gray, COLOR_BGR2GRAY);
//【5】Laplacian查找边缘
Laplacian(src_gray, dst, CV_16S, 3);
//【6】计算绝对值,并将结果转为8位
convertScaleAbs(dst, abs_dst);
//【7】显示效果图
imshow("Laplacian变换", abs_dst);
cout << "Laplacian算法输出图像的通道" << abs_dst.channels() << endl;
waitKey(0);
destroyAllWindows();
return 0;
}效果图如下,左边是原图,右边是拉普拉斯边缘检测图:

2、Scharr 算子
scharr算子和sobel的原理一致(sobel算子看上一章内容),但scharr算子对于边界的梯度计算效果更精确
他们的区别在于:
(1)是Gx和Gy参数的大小不同,也就是卷积核中各元素的权不同,其他都一样,scharr算子对于边界的梯度计算效果更精确;
(2)Scharr算子的核设计更加平滑,这使得其在一定程度上对噪声具有更好的鲁棒性;
(3)由于Scharr算子的核更复杂,因此在计算上可能相对Sobel算子更为耗时。
在实际应用中,选择Scharr还是Sobel通常取决于具体的场景和需求。如果对边缘的敏感度较高,并且噪声较少,Scharr算子可能是一个更好的选择。如果计算效率和简单性更为重要,那么Sobel算子可能更适合。
Scharr在X和Y轴方向的卷积核如下:

opencv之Scharr算子接口说明:
cpp
void Scharr( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT )src: 输入图像,可以是任意通道数的图像。
dst: 输出图像,算法的结果将存储在这里。
ddepth: 输出图像的深度,若src为CV_8U,则可取-1/CV_16S/CV_32F/CV_64F;若src为CV_16U/CV_16S,可取-1/CV_32F/CV_64F;若src为CV_32F,可取-1/CV_32F/CV_64F;若src为CV_64F,可取-1/CV_64F。,当赋值为-1时,输出图像的数据类型自动选择。
dx 和 dy: x 和 y 方向的导数阶数,通常为 0 或 1。0表示这个方向上没有求导。
scale: 可选参数,表示缩放因子,默认为1。
delta: 可选参数,表示在卷积结果上加上的偏置,默认为0。
borderType: 可选参数,用于指定边界模式,默认为 cv::BORDER_DEFAULT
代码演示:
cpp
#include <opencv2/opencv.hpp>
#include <iostream>
int main()
{
// 读取图像
cv::Mat image = cv::imread("1.jpg", cv::IMREAD_GRAYSCALE);
// 检查图像是否成功读取
if (image.empty()) {
std::cerr << "Error: Could not read the image." << std::endl;
return -1;
}
// 应用Scharr算子分别获取X和Y方向一阶边缘
cv::Mat scharrX, scharrY;
cv::Scharr(image, scharrX, CV_16S, 1, 0);
cv::Scharr(image, scharrY, CV_16S, 0, 1);
// 计算绝对值,并将结果转为8位
// 因为卷积操作可能产生负值,而这些负值在 CV_8U 类型中会被截断为零。在显示图像之前,通常需要对结果进行取绝对值(cv::abs())并进行数据类型转换。
convertScaleAbs(scharrX, scharrX);
convertScaleAbs(scharrY, scharrY);
// 显示原始图像和Scharr算子的输出
cv::imshow("Original Image", image);
cv::imshow("Gradient Magnitude", scharrX + scharrY);
waitKey(0);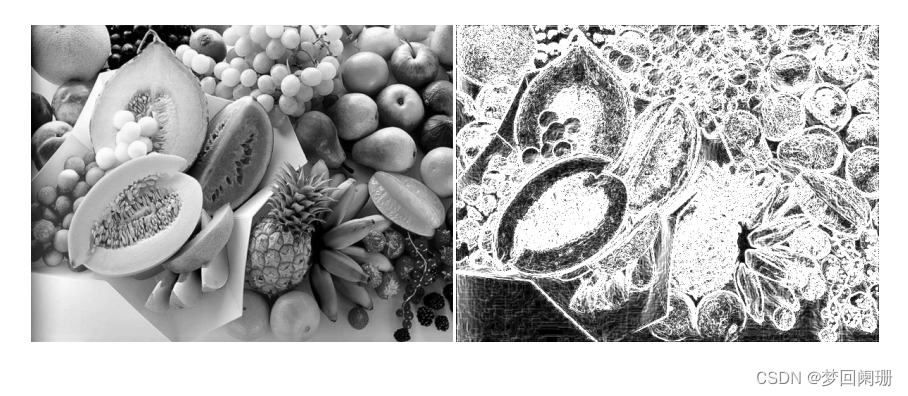
destroyAllWindows();
return 0;
}效果图如下,左边是原图,右边是Scharr边缘检测图

3、Log算子
LoG(Laplacian of Gaussian)算子结合了高斯滤波和拉普拉斯边缘检测,用于检测图像中的边缘。LoG算子首先对图像进行高斯平滑,然后应用拉普拉斯算子。这有助于减少噪声的影响,并突出图像中的边缘。
在OpenCV中,cv::GaussianBlur和cv::Laplacian函数可以用于实现LoG算子的操作。
cpp
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 读取图像
cv::Mat image = cv::imread("your_image.jpg", cv::IMREAD_GRAYSCALE);
// 检查图像是否成功读取
if (image.empty()) {
std::cerr << "Error: Could not read the image." << std::endl;
return -1;
}
// 高斯平滑
cv::Mat blurred;
cv::GaussianBlur(image, blurred, cv::Size(5, 5), 0);
// 应用拉普拉斯算子
cv::Mat laplacian;
cv::Laplacian(blurred, laplacian, CV_64F);
// 取绝对值并转换为8位无符号整数
laplacian = cv::abs(laplacian);
laplacian.convertTo(laplacian, CV_8U);
// 显示原始图像和LoG算子的输出
cv::imshow("Original Image", image);
cv::imshow("LoG Operator", laplacian);
// 等待用户按键
cv::waitKey(0);
return 0;
}