提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、IMU驱动安装
-
- [1. 安装依赖](#1. 安装依赖)
- [2. 源码的下载](#2. 源码的下载)
- [3. 编译源码](#3. 编译源码)
-
- [(1) 配置固定串口设备](#(1) 配置固定串口设备)
- [(2) 修改luanch文件](#(2) 修改luanch文件)
- [(3) 编译](#(3) 编译)
- 二、启动IMU
-
- [1. 运行imu](#1. 运行imu)
- [2. 查看imu数据](#2. 查看imu数据)
- 总结
前言
WHEELTEC的惯导模块使用惯性测量单元(IMU),是一种用于感知车辆运动状态的关键技术。IMU通过测量车辆的加速度和角速度来估计其姿态、位置和速度等信息。WHEELTEC的IMU采用先进的传感器技术和算法,能够提供高精度、高稳定性的运动信息,对于自动驾驶系统的导航、定位和控制至关重要。IMU能够在各种复杂环境下工作,并具有快速响应和低延迟的特点,为车辆提供准确的导航引导,实现安全可靠的自主行驶。
本教程介绍如何安装WHEELTEC的惯导模块的imu的驱动和使用。
一、IMU驱动安装
注意 :以下的教程适用于WHEELTEC的惯导模块的imu的驱动配置,不同厂家的imu对应的驱动程序不同。
1. 安装依赖
ros系统为noetic版本:
bash
sudo apt install ros-noetic-serial //此命令不能安装时,可以参考github官网的安装流程melodic版本下:
bash
终端输入:sudo apt install ros-melodic-serial2. 源码的下载
到工作空间的src的目录下,终端输入:
bash
https://github.com/SHUNLU-1/fdilink_ahrs.git3. 编译源码
(1) 配置固定串口设备
在src/fdilink_ahrs目录下执行脚本:
bash
sudo chmod 777 wheeltec_udev.sh
sudo sh wheeltec_udev.sh(2) 修改luanch文件
查看端口号:
将imu连接电脑的USB口,终端输入查看:
bash
ls /dev/ttyUSB0 //检查电脑能否识别到 ttyUSB0检测到 ttyUSB0 后,给 ttyUSB0 赋权限:
bash
sudo chmod 777 /dev/ttyUSB0修改luanch文件:
将文件中端口改成自己的设备端口,图下 :
bash
<param name="port" value="/dev/ttyUSB0"注意:端口号没修改或没插入设备,运行imu驱动时都会出现报错:Unable to open port)
整个launch文件的配置如下所示:
cpp
<launch>
<node pkg="fdilink_ahrs" name="ahrs_driver" type="ahrs_driver" output="screen" >
<!-- 是否输出debug信息 -->
<param name="debug" value="false"/>
<!-- 串口设备,可通过rules.d配置固定。
若使用DETA100,则value="/dev/wheeltec_ch340"
若使用WHEELTEC N系列,则不需要改动 -->
<param name="port" value="/dev/ttyUSB0"/>
<!-- 波特率 -->
<param name="baud" value="921600"/>
<!-- 发布的imu话题名 -->
<param name="imu_topic" value="imu"/>
<!-- 发布的imu话题中的frame_id -->
<param name="imu_frame" value="gyro_link"/>
<!-- 地磁北的yaw角 -->
<param name="mag_pose_2d_topic" value="/mag_pose_2d"/>
<!-- 发布的数据基于不同设备有不同的坐标系 -->
<!-- 0: origin_data, 1: for single imu or ucar in ROS, 2:for Xiao in ROS -->
<param name="device_type" value="1"/>
</node>
</launch> (3) 编译
在工作空间的目录下
终端输入:
bash
catkin_make或者
bash
catkin_make -DCATKIN_WHITELIST_PACKAGES=fdilink_ahrs //代码单独编译fdilink_ahrs文件二、启动IMU
1. 运行imu
编译完成后,终端输入:
bash
roscore
source ./devel/setup.bash
roslaunch fdilink_ahrs ahrs_driver.launch //启动imu2. 查看imu数据
(1) 查看imu的ros话题
bash
rostopic list(2) 终端显示imu的数据
bash
rostopic echo /imu 其中/imu是imu对应的话题。
终端打印的数据页面如下所示:
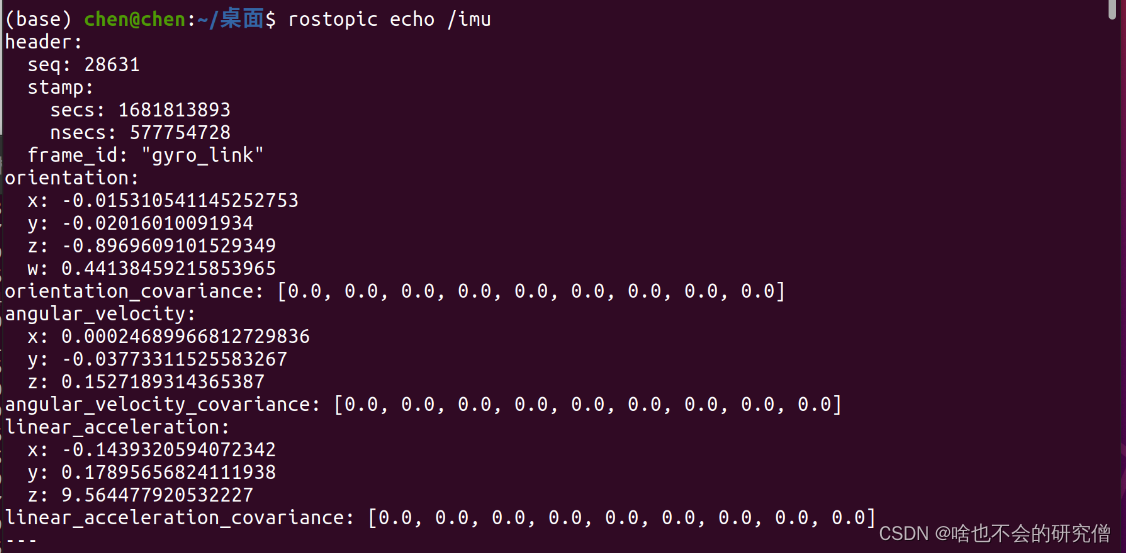
如打印imu话题数据如上所示,则代表imu驱动已经安装完成。
总结
以上教程介绍如何安装WHEELTEC的惯导模块的imu的驱动和使用,以及实测过程中如何修改参数已适配自己的传感器参数,如有其他的问题,可以评论区交流讨论!