
agv
在全球经济步入"寒冬"的大背景下,大量传统制造业企业开始谋划转变。通过引入AGV系统提升厂内物流效率、降低运营成本,已经成为制造业升级的趋势之一。
AGV是移动机器人的一个重要分支,具有并行作业、自动化、智能化和柔性化等优势,如今已广泛应用于自动化仓储系统、智能工厂、智能生产等领域。
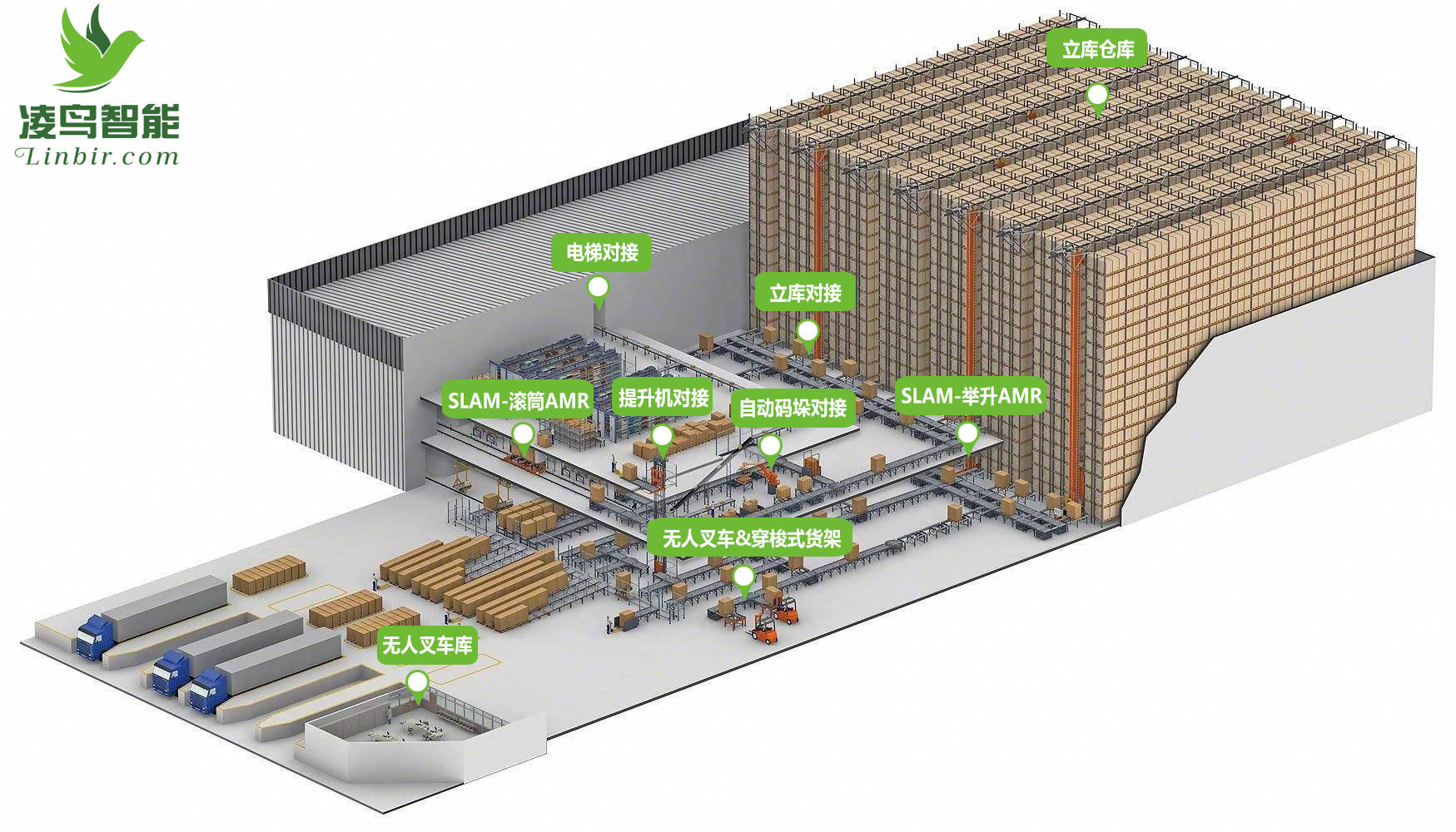
agv智能仓储物流
目前AGV导航定位使用中较为普遍的技术是激光定位技术。激光传感器被固定在AGV顶部,扫描周边环境与移动机器人的距离,并依据反馈的距离数据构建成导航地图。在导航过程中,AGV规划的前往地图中上位机下发的已知的目标地点执行任务,同时AGV实时反馈位置信息和任务执行情况,如图1。

agv与上位机交互
过程中由于货物的存放可能存在人为改变,或是AGV某一次存放位置偏差较大等,这会造成下一次AGV装配过程的失败,执行效率降低的同时存在一定不安全性,因此提出在实际应用中利用激光导航定位的同时,结合视觉传感器获取信息丰富的特点,对视觉信息进行基于灰度值的模版匹配算法与轮廓边缘检测算法找出待取货物下托盘的中心位置,来保证AGV能够进行正常的任务操作。

agv潜伏车
激光定位选择比较成熟的SLAM定位算法,物料管理系统下发任务,AGV管理监控计算机将任务具体下发分配给AGV,车到相应站台执行任务。视觉辅助运用模板匹配,提取感兴趣区域,边缘检测提取轮廓找中心点来检测货物托盘所在的位置,数据通信部分则主要进行通信转换,将视觉检测结果传输给AGV,AGV依据得到数据,对车位置进行相应调整,同时包含一些对HMI与相机实时通信交互。

agv小车
激光定位能够实现较高精度水平的定位,但在上位机已经下达所需要取卸货位置后,AGV会严格按照任务命令执行,到达位置是在误差范围内固定的,存在装载失败、取不到货物的情况,AGV输送系统的主要特点把物流优化到最佳状况做到效率最优化,故加入视觉辅助信息,极大增强货物存卸位置的灵活性,极大提高了工作效率,减少了现场调试人员的任务工作量,视觉信息的补充使得最终移动机器人可以快速准确地完成工作,为任务快速高效完成提供助力。