目录
一、概述
在点云数据中,强度(Intensity)指的是激光雷达传感器在扫描环境时,每个点返回的反射强度值。这些强度值代表了激光脉冲返回的能量,通常与物体表面的反射特性有关。不同的表面材料、颜色和角度会导致不同的反射强度值。
在Open3D中,处理和可视化带有强度信息的点云数据时,需要将强度信息与点的坐标一起存储和处理。以下是详细介绍点云强度信息的内容,以及如何在Open3D中处理和可视化带有强度信息的点云数据。
1.1强度信息的意义
- 材料属性:不同材料(如金属、木材、混凝土等)对激光的反射强度不同。通过分析强度值,可以推断物体的材料属性。
- 表面特性:物体表面的颜色和纹理也会影响激光反射强度。例如,白色表面通常比黑色表面反射更多的激光。
- 距离信息:激光雷达的反射强度可能随距离变化,因为更远的点反射回来的激光能量可能会衰减。
1.2应用场景
- 物体识别与分类:利用强度信息,可以更准确地识别和分类不同材质的物体。
- 环境建模:通过分析强度信息,可以提高三维环境建模的精度。
- SLAM(同步定位与地图构建):强度信息可以用于特征点匹配和回环检测,增强SLAM系统的稳定性和精度。
二、代码实现
在Open3D中可视化点云时,可以通过颜色表示强度信息,使得强度值较大的点显示为较亮的颜色,强度值较小的点显示为较暗的颜色。
python
import open3d as o3d
import numpy as np
def load_point_cloud_with_intensity(file_path):
# 假设文件格式为 .bin,包含 x, y, z, intensity 四个 float32 值
point_cloud = np.fromfile(file_path, dtype=np.float32).reshape(-1, 4)
points = point_cloud[:, :3] # 提取点坐标
intensities = point_cloud[:, 3] # 提取强度值
# 创建 Open3D 点云对象
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points)
# 将强度值作为颜色值进行可视化(灰度映射)
colors = np.zeros((points.shape[0], 3))
colors[:, 0] = intensities / intensities.max() # 将强度值归一化到 [0, 1] 范围
colors[:, 1] = colors[:, 0]
colors[:, 2] = colors[:, 0]
pcd.colors = o3d.utility.Vector3dVector(colors)
return pcd
def save_point_cloud_with_intensity(pcd, file_path):
# 将点云的 xyz 和强度值保存为 .bin 文件
points = np.asarray(pcd.points)
colors = np.asarray(pcd.colors)
intensities = colors[:, 0] # 假设颜色已经归一化,并用作强度值
point_cloud_with_intensity = np.hstack((points, intensities.reshape(-1, 1)))
point_cloud_with_intensity.tofile(file_path)
print(f"Point cloud with intensity saved to {file_path}")
# 示例用法
input_file = "path/to/your/point_cloud.bin"
output_file = "path/to/your/output_point_cloud.bin"
pcd = load_point_cloud_with_intensity(input_file)
o3d.visualization.draw_geometries([pcd], window_name="Point Cloud with Intensity")
# 如果需要保存处理后的点云
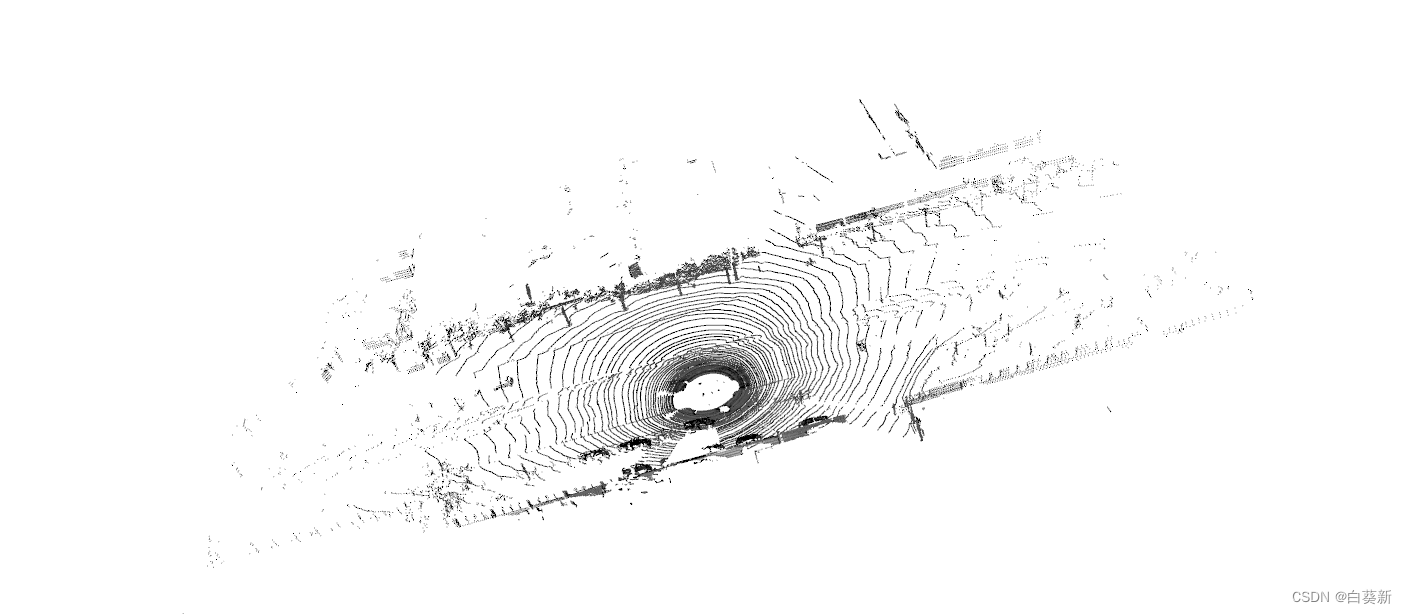
save_point_cloud_with_intensity(pcd, output_file)三、实现效果