SCI一区级 | Matlab实现BO-Transformer-GRU多变量时间序列预测
目录
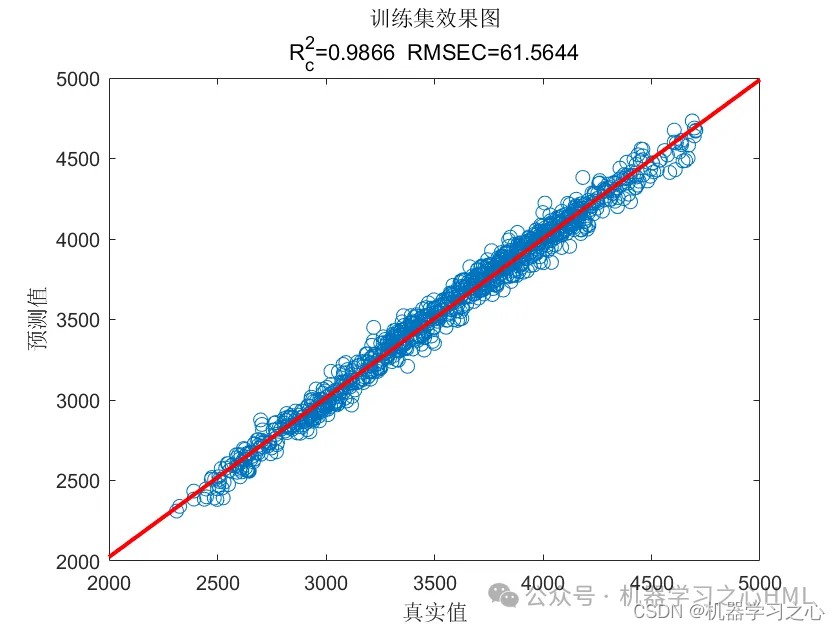
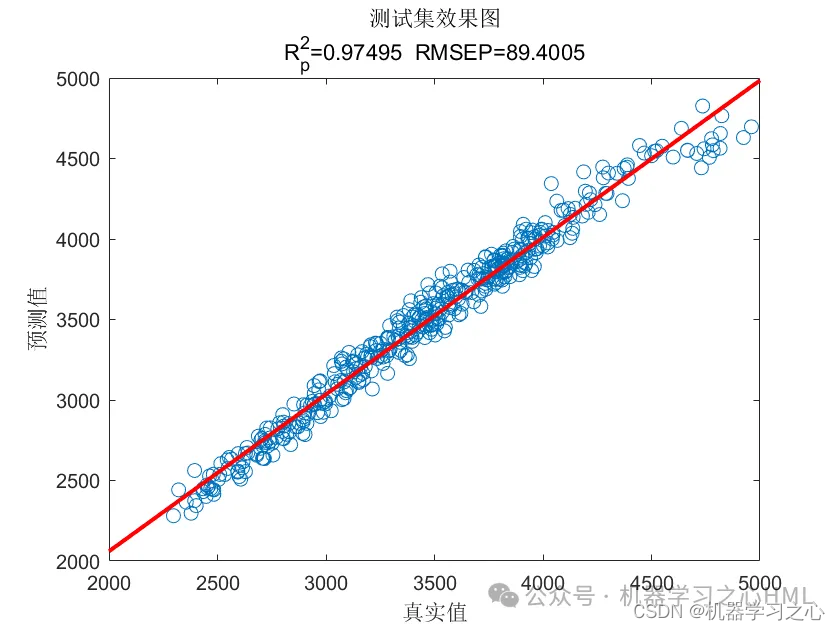
效果一览
基本介绍
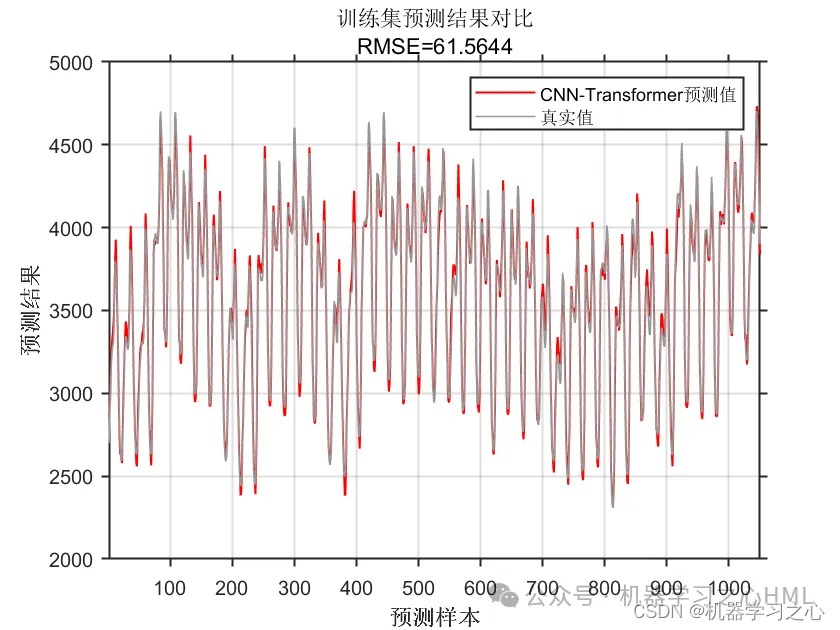
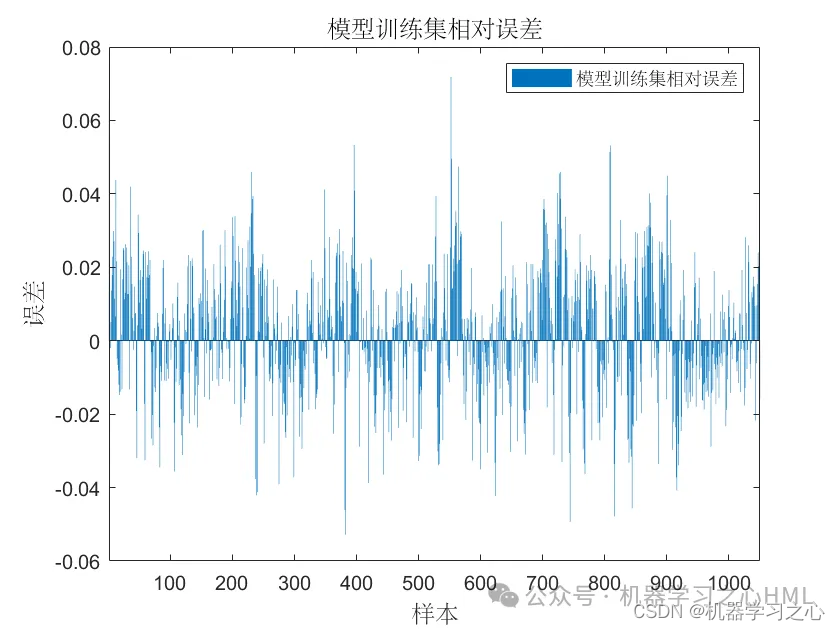
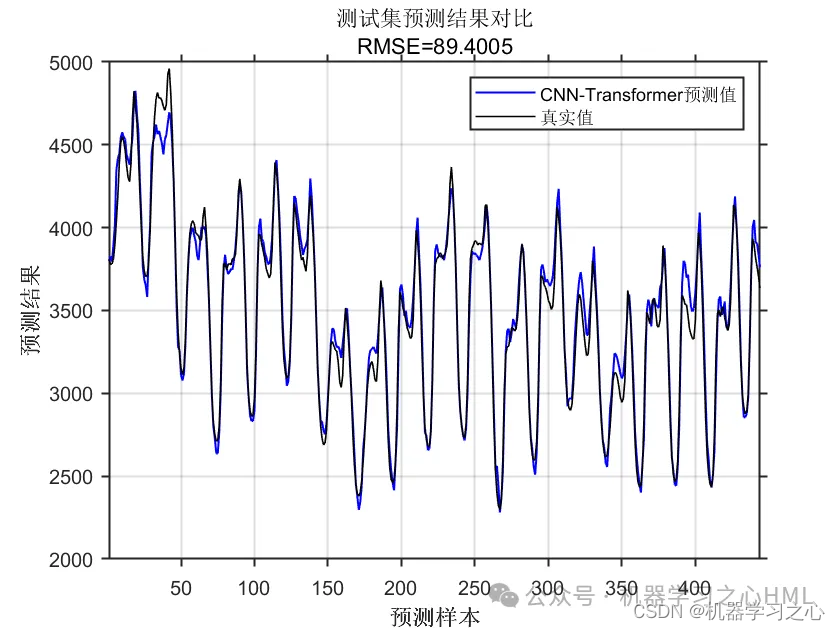
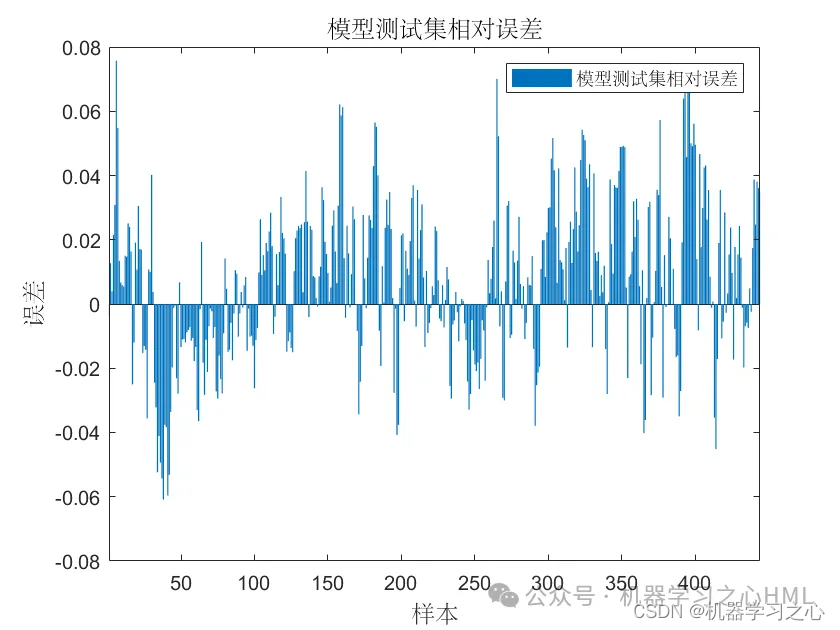
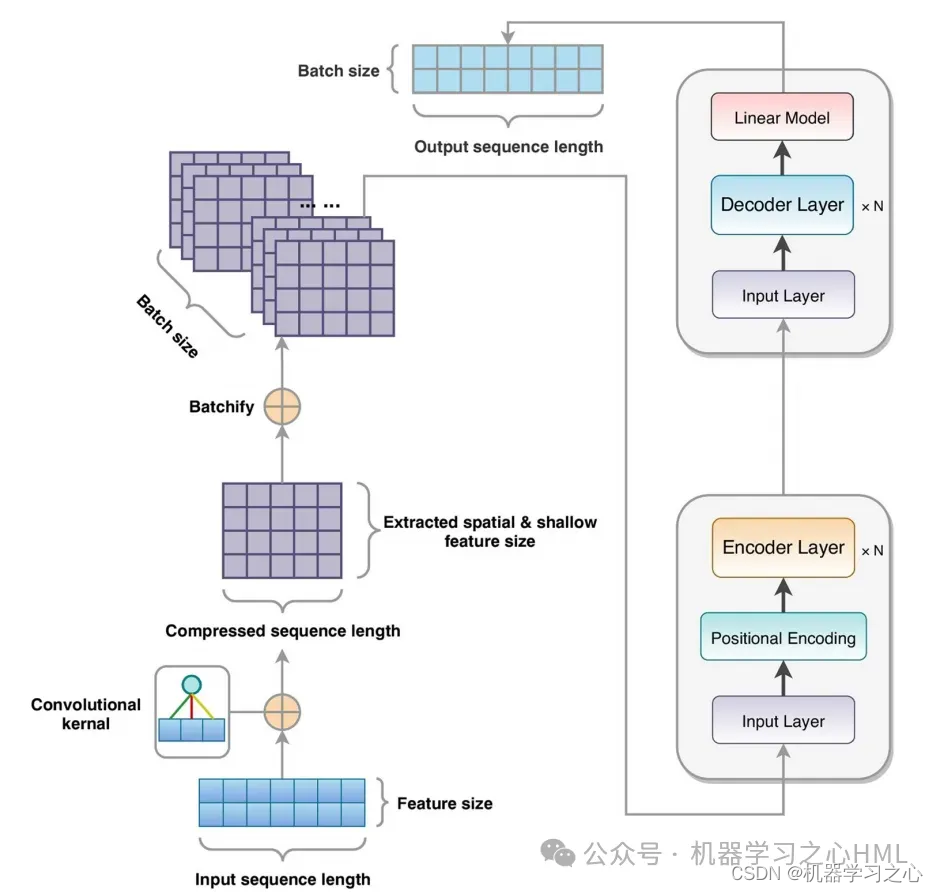
1.Matlab实现CNN-Transformer多变量时间序列预测;
2.运行环境为Matlab2023b及以上;
3.data为数据集,输入多个特征,输出单个变量,考虑历史特征的影响,多变量时间序列预测,main.m为主程序,运行即可,所有文件放在一个文件夹;
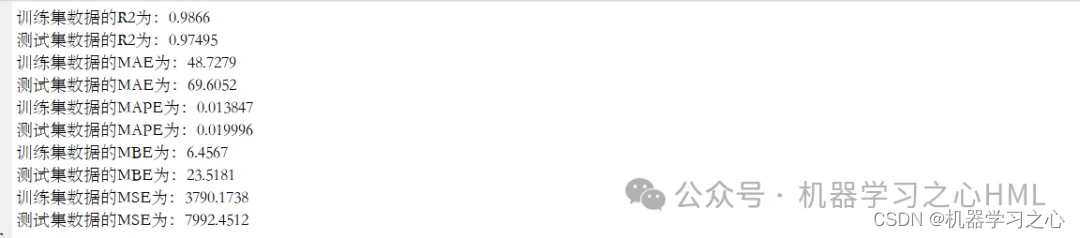
4.命令窗口输出R2、MSE、RMSE、MAE、MAPE、MBE等多指标评价;
传统的 CNN 在图像处理任务中表现出色,能够有效地提取局部特征,并通过层级结构捕捉图像中的抽象特征。然而,CNN 在处理长期依赖关系时可能存在一些限制,这在自然语言处理等序列数据任务中尤为明显。相比之下,Transformer 模型由于自注意力机制能够有效地捕捉序列数据中的长期依赖关系,因此在自然语言处理任务中取得了重要的突破。然而,Transformer 模型对于图像处理任务来说可能过于复杂,因为图像数据通常具有高维度和局部结构,这导致在处理图像时 Transformer 的计算量较大。为了充分利用 CNN 在图像处理中的优势和 Transformer 在捕捉长期依赖关系中的优势,CNN-Transformer 模型将输入数据首先通过 CNN 进行局部特征提取。CNN 层可以有效地捕捉图像中的局部模式和特征。然后,提取的特征被输入到 Transformer 模型中,以便利用其自注意力机制来捕捉全局的长期依赖关系。
程序设计
- 完整程序和数据下载私信博主回复Matlab实现CNN-Transformer多变量时间序列预测。
clike
%% 数据集分析
outdim = 1; % 最后一列为输出
num_size = 0.7; % 训练集占数据集比例
num_train_s = round(num_size * num_samples); % 训练集样本个数
f_ = size(res, 2) - outdim; % 输入特征维度
%% 划分训练集和测试集
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);
P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);
%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);
[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);
%% 数据平铺
% 将数据平铺成1维数据只是一种处理方式
% 也可以平铺成2维数据,以及3维数据,需要修改对应模型结构
% 但是应该始终和输入层数据结构保持一致
p_train = double(reshape(p_train, f_, 1, 1, M));
p_test = double(reshape(p_test , f_, 1, 1, N));
t_train = double(t_train)';
t_test = double(t_test )';
%% 构造网络结构
layers = [
imageInputLayer([f_, 1, 1]) % 输入层 输入数据规模[f_, 1, 1]
convolution2dLayer([3, 1], 16) % 卷积核大小 3*1 生成16张特征图
batchNormalizationLayer % 批归一化层
reluLayer % Relu激活层
convolution2dLayer([3, 1], 32) % 卷积核大小 3*1 生成32张特征图
batchNormalizationLayer % 批归一化层
reluLayer % Relu激活层
dropoutLayer(0.2) % Dropout层
fullyConnectedLayer(1) % 全连接层
regressionLayer]; % 回归层参考资料
1 https://blog.csdn.net/kjm13182345320/article/details/128163536?spm=1001.2014.3001.5502
2 https://blog.csdn.net/kjm13182345320/article/details/128151206?spm=1001.2014.3001.5502