目录
上一节,通过对SVPWM的推导,我们获得了控制电机转子任意受力的能力。本节,我们选用上节得到的转子dq轴解耦的SVPWM形式,对转子受力进行合理控制,实现FOC电机控制的最终目标:位置、速度、电流控制。
PID控制
看到本节的人,大概率是了解PID(Proportional比例,Integral积分,Derivative微分)控制的,也是本人能力所限,在此不进行完整讲解,也不涉及高级控制方法。
不管是电机的位置还是速度还是电流,都可以视为被控参数。
从直观想法上,当一个被控参数实时值小于目标值时,需要施加外力使被控参数提高。如果施加的外力过大,被控参数会被超调,导致被控参数在目标值附近的振荡幅度越来大;如果施加的外力过小,参数到达目标值的速度又太慢。因此需要得到一个合适的外力,使得被控参数既不会振荡越来越剧烈,调节速度也不会太慢。从这个直观的控制想法就是PID中的P。单纯使用P控制时,设置外力大小=被控参数与目标值的差距*P系数,所谓差距越大施加的外力越大,是很直观的。如果P系数设置的比较小,虽然被控参数不会一直振荡了,可以慢慢稳定到目标值了,但是调节速度太慢了,此时可以加入PID的D控制,使得原先振荡的被控参数快速收缩到目标值。
再从直观想法上去思考D控制,纯P控制下被控参数靠近以及掠过目标值时,一个与速度反方向的纠偏力有助于被控参数在目标值附近产生制动,让被控参数更快地收缩到目标值。这个与速度反方向的纠偏力就是D控制。加入D控制后,控制外力大小=被控参数与目标值的差距*P系数+被控参数速度*D系数。当纯D控制时,由于初始状态下被控参数的速度为0 ,被控参数不会得到外力,由此也可以看出,P控制是提供外力的,D控制是约束外力的。如果D系数选择过大,则轻微的速度就能够引起巨大的外力;如果D系数选择过小,则不足以约束P控制生产的外力,被控参数稳定就慢。
还是从直观想法上去思考I控制,当被控参数存在负载时,单纯的P控制提供的外力可能不足以支撑这个负载,因此可以加上这样一个机制,把被控参数与目标值差距随着时间累计起来,这样就能得到存在负载时被控参数到达目标值所需的动力了。这个机制就是I控制。加入I控制后,控制外力大小=被控参数与目标值的差距*P系数+被控参数速度*D系数+被控参数与目标值差距随时间累计*I系数。
在控制电机时,没有特殊情况下,由于d轴对电机旋转不生成贡献,pid控制可以只控制q轴的力,d轴可以进行控制也可以直接设置输出为0。
滤波
在速度控制和电流控制时,受限于采样精度和频率等,速度和电流是不稳定的且变化比较快,例如下图是电机速度的直接计算值,存在很多锯齿,在真实值附近波动,如果直接使用这样的值,会导致PID输出波动较大,

下图为经过滤波后,比较接近真实值: 滤波方法有很多种,比如低通滤波、卡尔曼滤波,本质就是在夹杂了噪音的数据中估计出一个接近真实的值。由于滤波是一个非常大的课题,原理不在本节进行说明,可直接查看后续实践部分的代码,只是在此提醒,输入PID控制器前,需要进行滤波计算。
滤波方法有很多种,比如低通滤波、卡尔曼滤波,本质就是在夹杂了噪音的数据中估计出一个接近真实的值。由于滤波是一个非常大的课题,原理不在本节进行说明,可直接查看后续实践部分的代码,只是在此提醒,输入PID控制器前,需要进行滤波计算。
单独位置控制
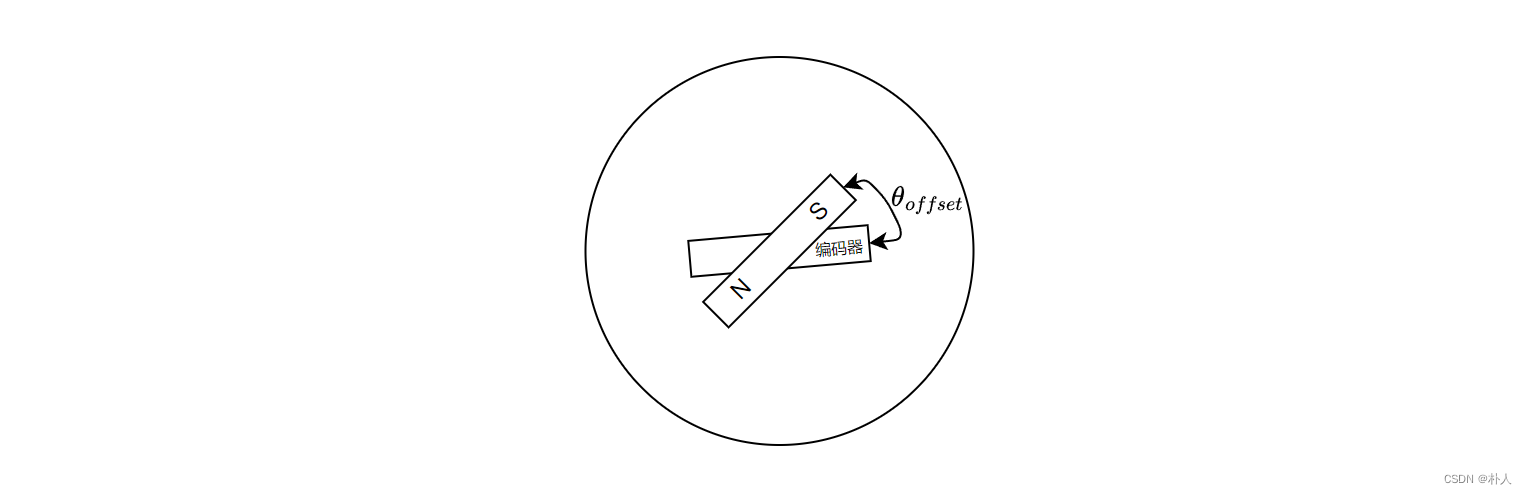
位置指的是角度,要注意,有两种物理角度,一个是电机角度,一个是转子角度,两者是不一样的。电机编码器是安装在转子外壳上的,因此编码器获得的是转子外壳的角度,而转子位于内部,由于转子外壳和转子是互相固定的,两种角度有一个固定偏移,安装的时候编码器零度不可能正好对着转子永磁体。编码器角度由编码器提供,转子角度也就能知道了。在后续实践部分会说明怎么获得这个固定偏移,在本节只需完成理论计算部分。合成的磁矢量是作用于转子永磁体的,因此理论计算是在转子角度基础上计算的。
有两种方法可以实现转子的位置控制:
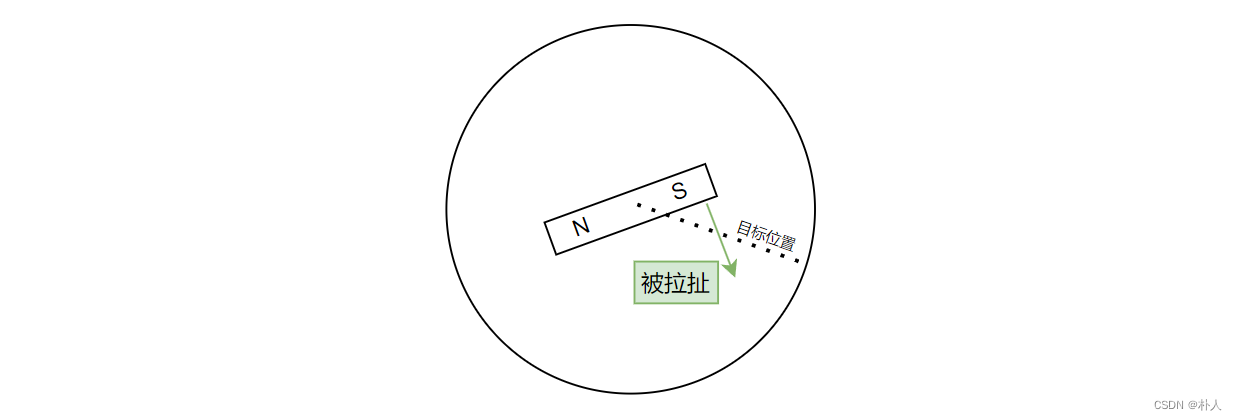
pid法:
直观的思想就是用转子q轴不停地左右拉扯转子,转子一旦偏离目标位置了,就在q轴施加一个反向的力拉扯一下,偏离越大,拉扯力越大,让转子回到目标位置。
优点:q轴能够提供较大的力,位置控制比较迅速有力。
缺点:由于q轴与转子永磁体磁矢量相差90度,因此需要知道转子实时位置(角度)。
由于在有编码器的情况下,转子实时位置很容易获得,因此大部分情况下使用pid控制位置。
单独位置的FOC控制框图如下图。图中的意思是输入一个目标位置,与编码器计算得到的角度进行差值计算,然后输入pid控制器,只控制转子q轴强度,d轴强度直接设置为0,最后将dq轴强度(0~1之间)输入到前文推导得到的SVPWM函数中,输出得到uvw桥臂的pwm占空比。这里要注意的是输入的目标位置 θ i n \theta_{in} θin可以是转子角度或者编码器角度或者多圈角度,只要与反馈的 θ \theta θ保持同一种角度即可。

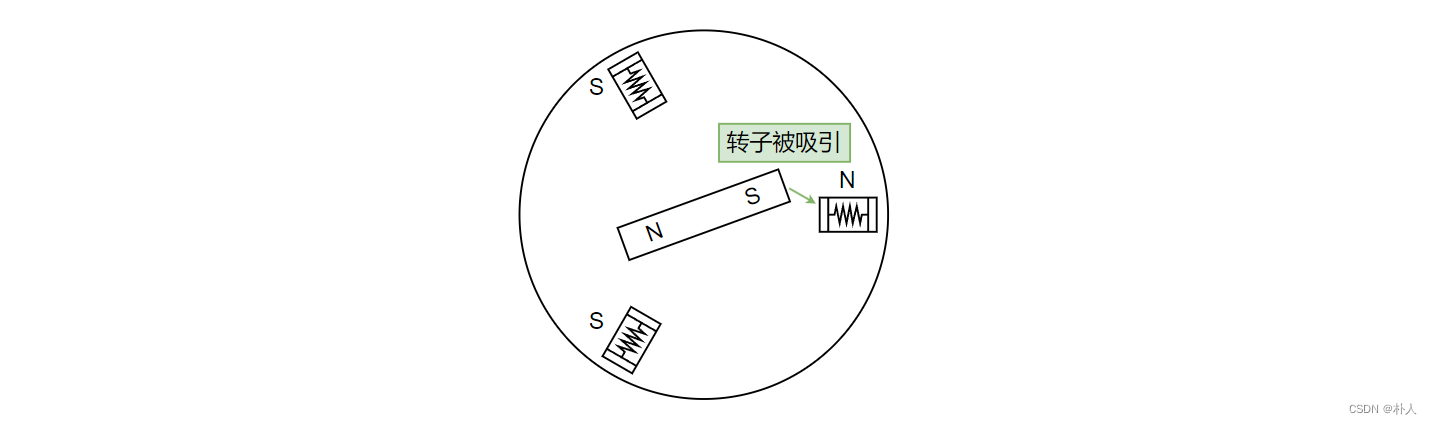
d轴强拖:
核心思想是人为控制线圈生成一个目标线圈磁矢量,永磁铁的d轴会被吸引到目标位置。注意该方法是吸引d轴到目标位置。
优点:由于生成的就是目标位置,因此无需知道转子角度,转子自然会被吸引过去。
缺点:切向分力小,轻微切向外力就能让转子明显脱离位置。
单独速度控制
速度控制使用d轴拖动的方法就不合适了,因为d轴拖动就是为了不使用编码器,没了编码器数据就很难计算速度了。速度控制可以使用pid控制方法,但是由于电机旋转过程中速度值变化比较不稳定,而D控制是与被控参数的变化程度成正比,所以一般只使用PI控制。
速度的计算方式非常简单,就是 当前角度 − 上次记录的角度 Δ t \frac{当前角度-上次记录的角度}{\Delta{t}} Δt当前角度−上次记录的角度。
将目标速度与实时速度的差值输入到PI控制中就能实现速度控制。
单独速度的FOC控制框图如下图。

单独电流控制
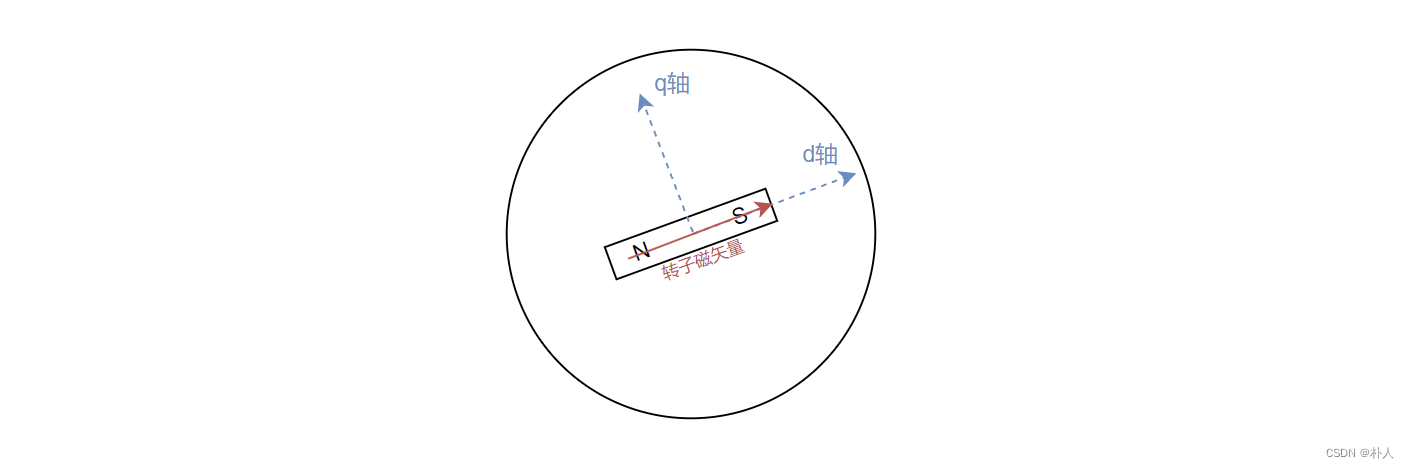
电机的电流代表了力矩大小。转子的受力在dq轴解耦后,可以发现只有q轴才对电机旋转生成贡献,只有q轴才产生力矩,因此只需要控制q轴电流即可控制电机力矩。如果对d轴电流也进行控制可以提升电机电流利用率,降低发热,提升电机最高力矩输出。
获得电机电流:
转子dq轴是一个抽象出来的概念,是为了方便解耦转子受力的,无法直接检测dq轴电流,能够直接检测的电流是电机相线电路上的电流,dq轴电流可以根据相线电流计算得到。
相线电流的检测有很多种,最常见的两种方式是:1.电流检测放置在上下桥臂功率管之间,称为在线检测。2.电流检测放置在下桥臂与GND之间,称为低端检测。
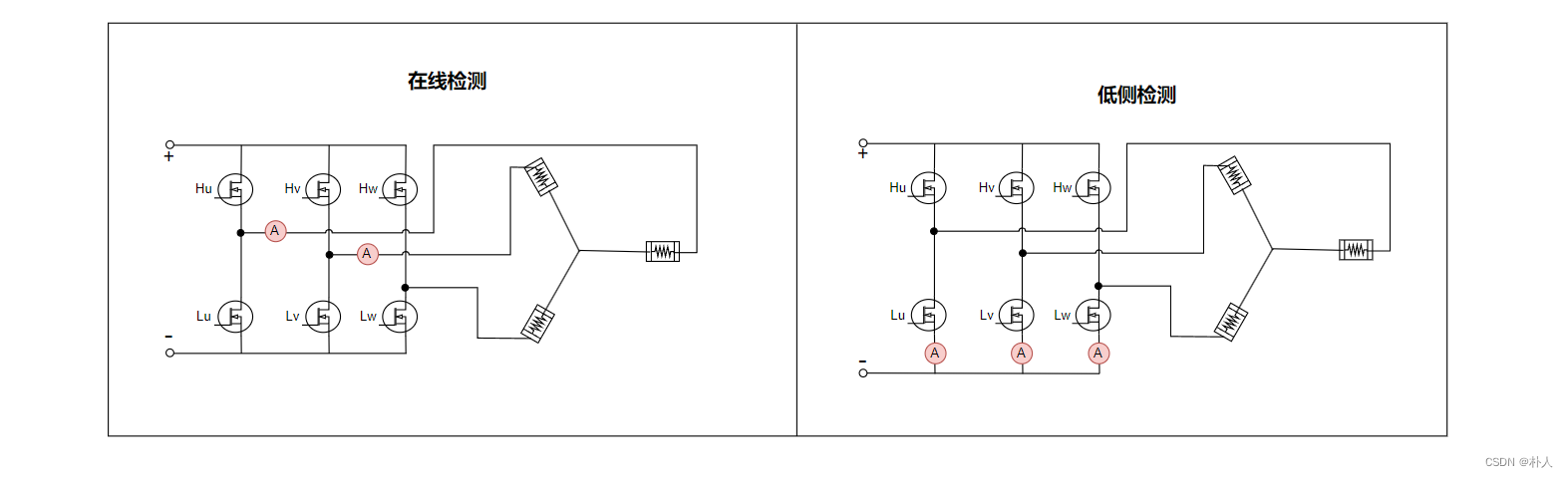
由于一个节点流出电流+流入电流=0,因此三个相线只需要两个电流检测单元即可。但是低侧检测最好使用三个电流检测单元,因为当某个桥臂的pwm占空比为1或者接近1时,该下桥臂将没有电流经过或者电流不稳定,三个相线就只剩下一个电流检测能够正常采集电流,有三个电流检测单元后,可以三个都读取电流,根据占空比情况选择其中两个电流值,另一个通过电流总和为0进行计算。在线检测则没有该困扰,因为不管下桥臂是否处于关闭状态,相线始终有电流经过。由于在线检测位置的电压比较大,因此在线检测的电流检测单元需要能够承受较大电压,价格比较高。
获得三个相线电流后,接下来想办法转换为dq轴电流。可以将相线电流投影到dq轴上,这样就能直接得到dq轴电流了,不过目前主流做法是先将dq轴投影到 α \alpha α轴和 β \beta β轴(这步称为clark变换),再将 α \alpha α轴和 β \beta β轴电流投影到dq轴(这步称为park变换),因为在更高级的无位置传感器FOC中会用到 α \alpha α轴和 β \beta β轴电流。
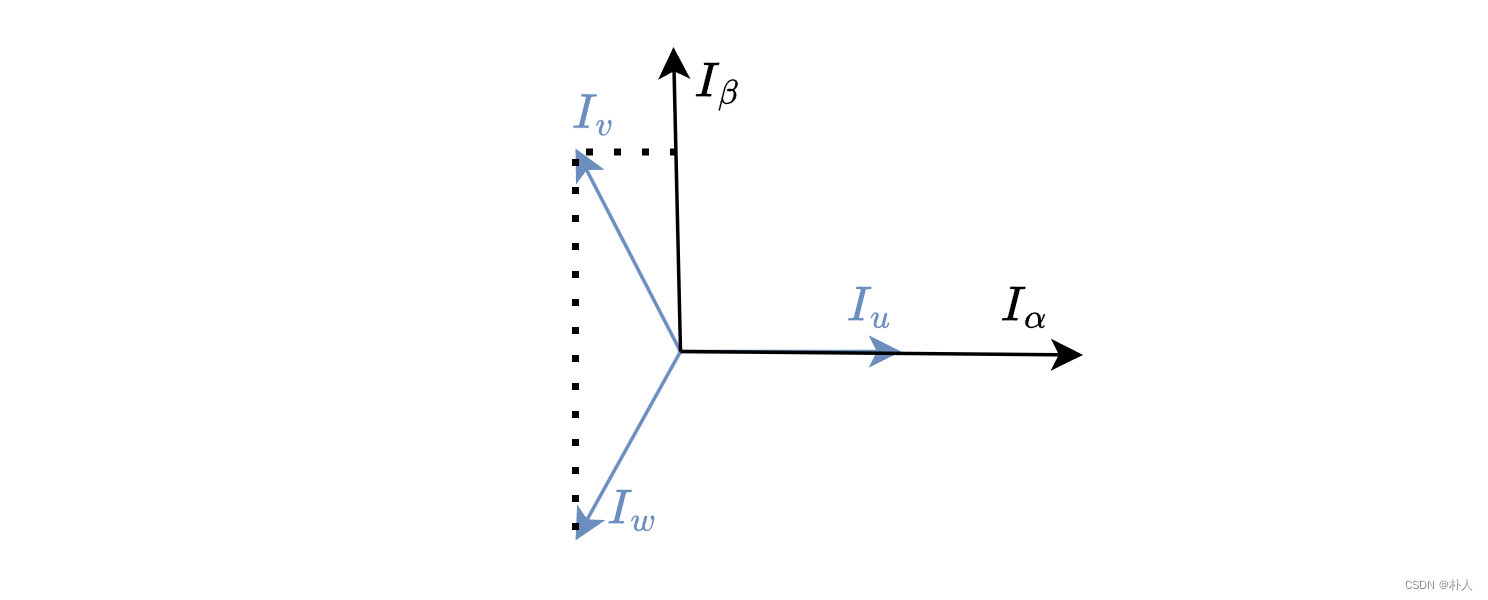
clark变换:
将三相电流 I u , I v , I w I_u,I_v,I_w Iu,Iv,Iw投影到 I α , I β I_\alpha,I_\beta Iα,Iβ上,从下图的几何关系可以看出,投影表达式为:
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 ° \begin{cases} I_\alpha=I_u-I_v*\cos{60^{\degree}}-I_w*\cos{60^{\degree}} \\ I_\beta=I_v*\cos{30^{\degree}}-I_w*\cos{30^{\degree}} \end{cases} {Iα=Iu−Iv∗cos60°−Iw∗cos60°Iβ=Iv∗cos30°−Iw∗cos30°
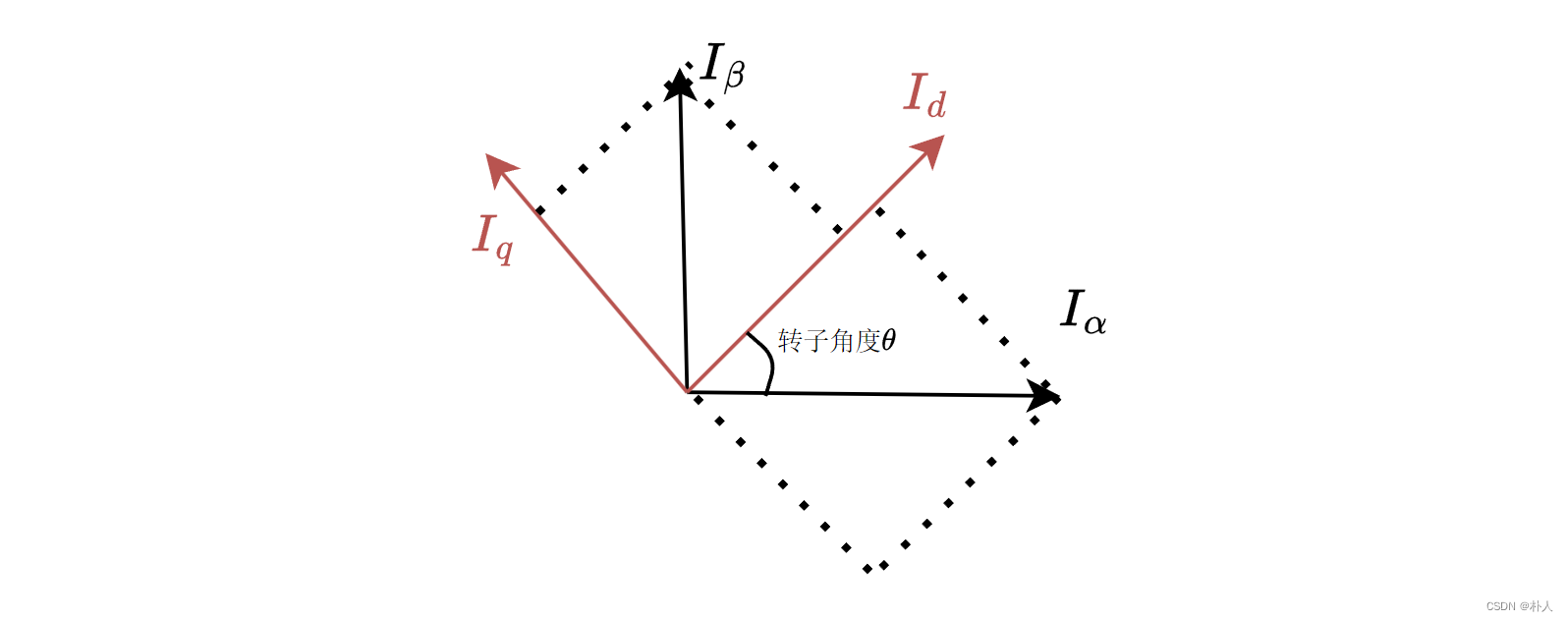
park变换:
将 I α , I β I_\alpha,I_\beta Iα,Iβ轴投影到dq轴(实际上就是乘以一个旋转矩阵),从下图的几何关系可以看出,投影表达式为:
{ I d = I α ∗ cos θ + I β ∗ sin θ I q = − I α ∗ sin θ + I β ∗ cos θ \begin{cases} I_d=I_\alpha*\cos{\theta}+I_\beta*\sin{\theta} \\ I_q=-I_\alpha*\sin{\theta}+I_\beta*\cos{\theta} \end{cases} {Id=Iα∗cosθ+Iβ∗sinθIq=−Iα∗sinθ+Iβ∗cosθ
单独电流的FOC控制图如下图,由于电流变化比较不稳定,所以与被控参数变化速度有关的D控制在这里通常不使用,只使用PI控制。

位置-速度-电流串级控制
如果有这样一个需求:控制位置时,规定电机归位过程中的最大速度以及最大电流;或者控制速度时,规定电机到达目标速度过程中的最大电流,那么就需要使用到位置-速度-电流串级控制。这里的串级控制并不是控制电机达到某一个电流值或者速度值,而是要求电机在控制过程中能够达到的最大电流值或者最大速度值,因为无法做到电机保持在一个位置的时候,依然有速度或者有电流。
串级控制的意思就是当前控制环的输入为上一个控制环的输出,以串级位置控制为例,控制框图为:

理论部分目前到此结束,我们得到了SVPWM的计算方法以及位置、速度、电流的控制流程,可以进行FOC代码编写了,但是实践的时候会遇到种种问题,比如相线的顺序、pwm占空比怎么落实、电流采样时刻、外设的配置等,接下来的实践部分使用超常见的单片机性价比之王:smt32f103c8t6以及stm32cube工具,不使用电机库,从零开始实现完整的FOC控制。