摘要
本文介绍了如何使用Simulink进行四轴飞行器(四旋翼)仿真,通过建立详细的动力学模型和控制系统,实现对四旋翼无人机的姿态、位置和路径控制的精确仿真。该仿真环境不仅能够用于研究无人机的飞行控制性能,还可用于开发和验证新的控制算法。
理论
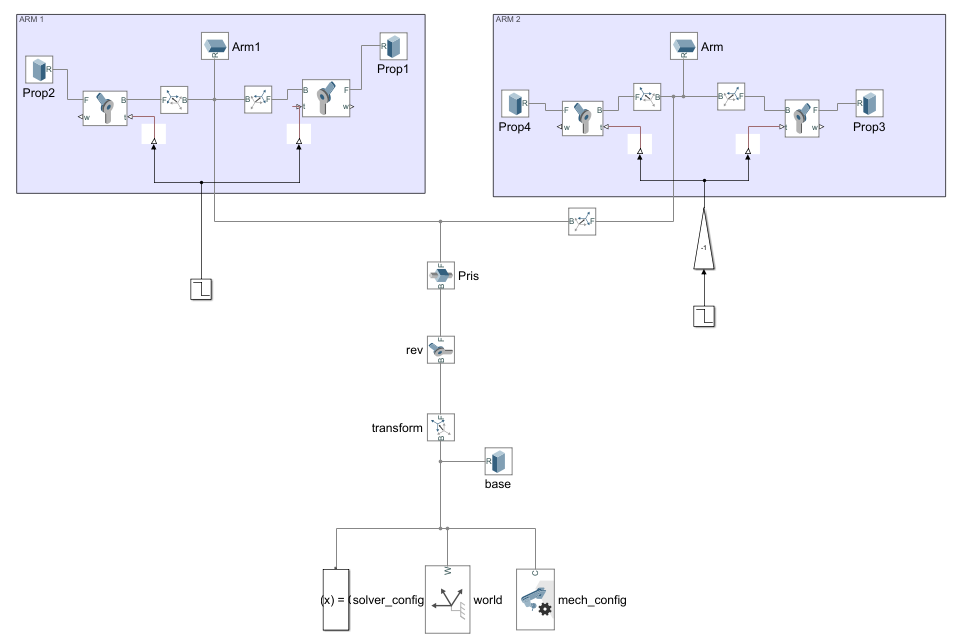
四轴飞行器是一种多旋翼飞行器,主要通过四个旋翼的推力和扭矩实现姿态和位移控制。其动力学模型由牛顿-欧拉方程描述,涵盖了飞行器在三维空间中的运动。仿真模型通常包括以下几个关键部分:
1. 动力学模型*:
定义了四轴飞行器的质量、惯性、推力和阻力特性,通过微分方程描述其在三维空间中的动态行为。
2. 控制系统:
采用如PID控制、LQR控制等经典控制算法,实现对飞行器的姿态和位置的精确控制。
3. 仿真环境:
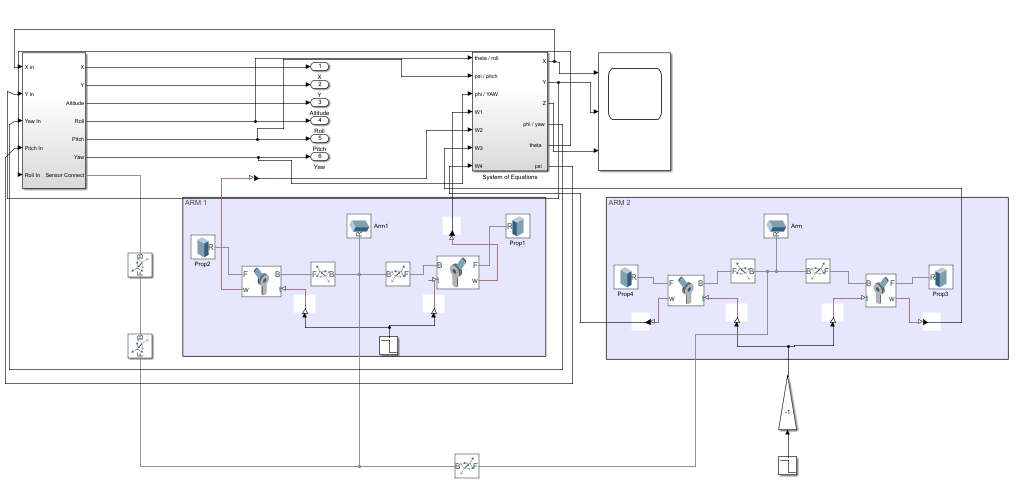
利用Simulink建立飞行器的仿真模型,集成动力学方程和控制算法,进行系统级的仿真和测试。
实验结果
通过在Simulink中建立四轴飞行器的仿真模型,实验展示了飞行器在不同控制策略下的飞行表现。仿真结果表明,在设定的路径跟踪任务中,四轴飞行器能够稳定地跟踪目标轨迹,保持预定的姿态和位置。
1. 姿态控制:
在PID控制器的作用下,四轴飞行器能够快速稳定到所需的姿态角度,并有效抑制外界扰动带来的影响。
2. 路径跟踪:
四轴飞行器在给定的路径跟踪任务中,能够精确跟踪目标轨迹,仿真中表现出较小的跟踪误差和快速的响应时间。
3. 动态响应:
通过调整控制参数,可以观察到飞行器在不同条件下的动态响应,包括响应速度、过冲和稳定性等指标的变化。
部分代码
% Load the quadrotor model
load_system('quadrotor');
% Set simulation parameters
simTime = 15; % Simulation time in seconds
stepSize = 0.01; % Simulation step size
% Run the simulation
simOut = sim('quadrotor', 'SimulationMode', 'normal', ...
'StopTime', num2str(simTime), 'FixedStep', num2str(stepSize));
% Extract simulation results
time = simOut.tout;
position = simOut.yout{1}.Values.Position;
attitude = simOut.yout{1}.Values.Attitude;
% Plot results
figure;
subplot(2,1,1);
plot(time, position.Data);
title('Quadrotor Position');
xlabel('Time (s)');
ylabel('Position (m)');
legend('X', 'Y', 'Z');
subplot(2,1,2);
plot(time, attitude.Data);
title('Quadrotor Attitude');
xlabel('Time (s)');
ylabel('Angle (rad)');
legend('Roll', 'Pitch', 'Yaw');参考文献
❝
Liu, Y. (2024). Advanced Control Techniques for Quadrotors. Elsevier.
Brown, J. (2024). Flight Dynamics and Control of Quadrotor UAVs. McGraw-Hill.