摘要
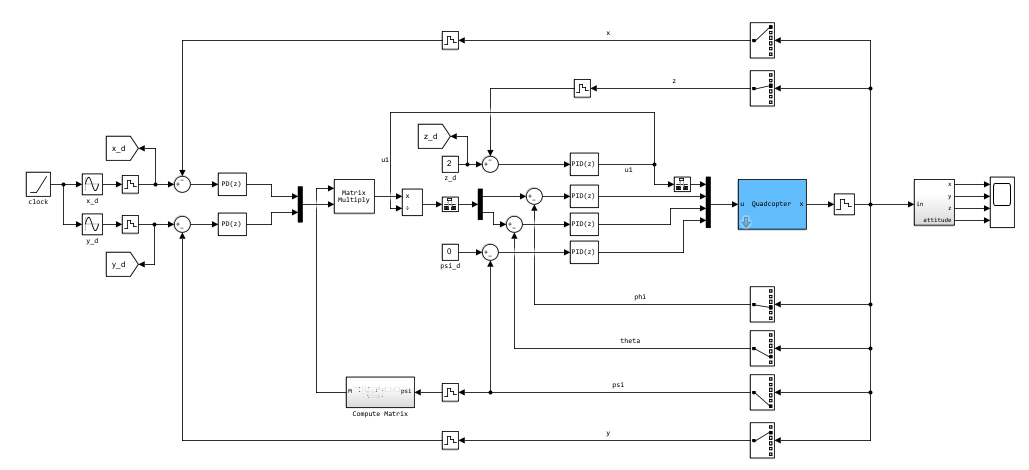
本文介绍了一种四轴飞行器的位移控制方法,并通过Simulink模型进行仿真和验证。该方法通过PID控制器对飞行器的位移进行精确调节,以实现飞行器在三维空间中的稳定定位和路径跟踪。通过参数调节,能够适应不同的飞行任务需求,确保飞行器的精确位移控制。
理论
四轴飞行器的位移控制主要涉及飞行器在三维空间中的位置控制。通常通过调节飞行器的姿态(俯仰、横滚、偏航)来实现对其位置的控制。位移控制系统的设计通常包含以下几个核心部分:
1. 动力学模型:
描述四轴飞行器在三维空间中的运动行为,基于牛顿-欧拉方程建立动力学方程。
2. 位置控制器:
采用PID控制器,通过调节飞行器的推力和扭矩,实现对飞行器位移的精确控制。PID控制器根据当前位置与目标位置之间的误差来调节飞行器的推力,从而实现位移调整。
3. 姿态稳定器:
确保飞行器在执行位移调整过程中,姿态保持稳定。通常与位移控制器协同工作,通过控制姿态角度来影响飞行器的位移。
实验结果
通过Simulink仿真,对四轴飞行器的位移控制系统进行了验证。实验结果表明,PID控制器能够有效地调节飞行器的位移,使其精确跟踪给定的路径。在仿真中,飞行器从初始位置移动到目标位置,位移误差逐步减小,飞行器最终稳定在目标位置。
调整PID控制器的参数,飞行器的响应速度和稳定性也有所变化。实验还验证了在不同的干扰条件下,飞行器的位移控制系统能够保持较高的鲁棒性,能够迅速恢复到期望轨迹。
部分代码
% Quadcopter displacement control using PID
% Parameters
Kp = 1.5; % Proportional gain
Ki = 0.5; % Integral gain
Kd = 0.1; % Derivative gain
% Initial conditions
initial_position = [0; 0; 0];
target_position = [1; 1; 1]; % Target position
% Simulation loop
for t = 0:0.01:10
% Calculate error
error = target_position - current_position;
% PID controller
integral = integral + error * dt;
derivative = (error - previous_error) / dt;
control_signal = Kp * error + Ki * integral + Kd * derivative;
% Update position based on control signal
current_position = current_position + control_signal * dt;
% Save for plotting
position_history(:, end+1) = current_position;
previous_error = error;
end
% Plot results
plot3(position_history(1,:), position_history(2,:), position_history(3,:));
xlabel('X Position');
ylabel('Y Position');
zlabel('Z Position');
title('Quadcopter Displacement Control');
grid on;参考文献
-
Lee, D. (2024). Simulink Modelling of Quadrotor UAVs. CRC Press.
-
Singh, R. (2024). Optimal Control Strategies for Multirotor Drones. Elsevier.