本章概述如何通过 Python 接口使用流行的计算机视觉库 OpenCV。OpenCV 是一个C++ 库,用于(实时)处理计算视觉问题。实时处理计算机视觉的 C++ 库,最初由英特尔公司开发,现由 Willow Garage 维护。OpenCV 是在 BSD 许可下发布的开源库,这意味着它对于学术研究和商业应用是免费的。OpenCV 2.0 版本对于 Python 的支持已经得到了极大的改善。下面,我们会讲解一些基本的例子并深入了解视频与跟踪。
10.1 OpenCV的Python接口
OpenCV 是一个 C++ 库,它包含了计算机视觉领域的很多模块。除了 C++ 和 C,Python 作为一种简洁的脚本语言,在 C++ 代码基础上的 Python 接口得到了越来越广泛的支持。目前,OpenCV 的 Python 接口仍在发展,不过并不是所有的 OpenCV组件都提供了相应的 Python 接口,此处还有很多函数没有文档说明。因为该接口背后有一个很活跃的开发社区,所以这种现状很有可能得到改变。Python 接口文档说明见 http://opencv.willowgarage.com/documentation/python/index.html
OpenCV 2.3.1 版本实际上提供了两个 Python 接口。旧的 cv 模块使用 OpenCV 内部数据类型,并且从 NumPy 使用起来可能需要一些技巧。新的 cv2 模块用到了 NumPy 数组,并且使用起来更加直观 1 ,可以通过以下方式导入新的 cv2 模块:
import cv2
而对于旧的 cv 模块可以通过以下方式导入:
import cv2.cv
本章中我们将关注 cv2 模块;注意这些名字的衍变、函数名称的改变以及在后来版本中的定义。现在,OpenCV 和 Python 接口在飞速发展中。
10.2 OpenCV基础知识
OpenCV 自带读取、写入图像函数以及矩阵操作和数学库。关于 OpenCV 的细节,有一本很好的书 (只有 C++ 版)。我们现在来看一些基本的组件及其使用方法。
10.2.1 读取和写入图像
下面这个简短的例子会载入一张图像,打印出图像大小,对图像进行转换并保存为 .png 格式:
import cv2
读取图像
im = cv2.imread('empire.jpg')
h,w = im.shape:2
print h,w
保存图像
cv2.imwrite('result.png',im)
函数 imread() 返回图像为一个标准的 NumPy 数组,并且该函数能够处理很多不同格式的图像。如果你愿意,可以将该函数作为 PIL 模块读取图像的备选方案。函数imwrite() 会根据文件后缀自动转换图像。
10.2.2 颜色空间
在 OpenCV 中,图像不是按传统的 RGB 颜色通道,而是按 BGR 顺序(即 RGB 的倒序)存储的。读取图像时默认的是 BGR,但是还有一些可用的转换函数。颜色空间的转换可以用函数 cvColor() 来实现。例如,可以通过下面的方式将原图像转换成灰度图像:
im = cv2.imread('empire.jpg')
创建灰度图像
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
在读取原图像之后,紧接其后的是 OpenCV 颜色转换代码,其中最有用的一些转换代码如下:
• cv2.COLOR_BGR2GRAY
• cv2.COLOR_BGR2RGB
• cv2.COLOR_GRAY2BGR
上面每个转换代码中,转换后的图像颜色通道数与对应的转换代码相匹配,比如对于灰度图像只有一个通道,对于 RGB 和 BGR 图像则有三个通道。最后的 cv2.COLOR_GRAY2BGR 将灰度图像转换成 BGR 彩色图像;如果你想在图像上绘制或覆盖有色彩的对象,CV2.COLOR_GAY2BGR 是非常有用的,我们会在后面的例子中用到它。
10.2.3 显示图像及结果
我们来看一些用 OpenCV 处理图像的例子,以及怎样利用 OpenCV 绘制功能和窗口管理功能来显示结果。
第一个例子是从文件中读取一幅图像,并创建一个整数图像表示:
import cv2
读取图像
im = cv2.imread('fisherman.jpg')
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
计算积分图像
intim = cv2.integral(gray)
归一化并保存
intim = (255.0*intim) / intim.max()
cv2.imwrite('result.jpg',intim)
读取图像后,将其转化为灰度图像,函数 integral() 创建一幅图像,该图像的每个像素值是原图上方和左边强度值相加后的结果;这对于快速评估特征是一个非常有用的技巧。OpenCV 的 CascadeClassifier 用到了积分图像,立足于 Viola 和 Jones在文献中引入的框架。在保存图像前,通过除以图像中的像素最大值将其归一化到 0 至 255 之间。图 10-1 显示了示例图像结果。
第二个例子从一个种子像素进行泛洪填充:
import cv2
读取图像
filename = 'fisherman.jpg'
im = cv2.imread(filename)
h,w = im.shape:2
泛洪填充
diff = (6,6,6)
mask = zeros((h+2,w+2),uint8)
cv2.floodfill(im,mask,(10,10), (255,255,0),diff,diff)
在 OpenCV 窗口中显示结果
cv2.imshow('flood fill',im)
cv2.waitKey()
保存结果
cv2.imwrite('result.jpg',im)
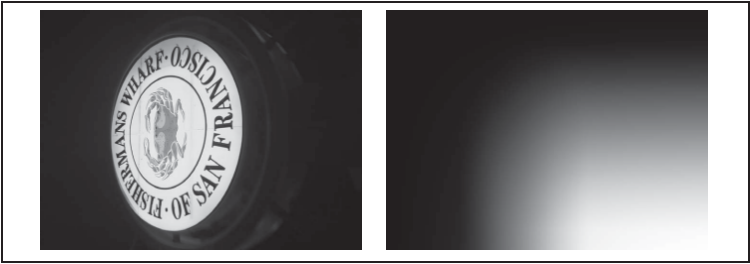
图 10-1:用 OpenCV 的 integral() 函数计算积分图像
在该例中,对图像应用泛洪填充并在 OpenCV 窗口中显示结果。waitKey() 函数一直处于暂停状态,直到有按键按下,此时窗口才会自动关闭。这里的 floodfill() 函数获取(灰度或彩色)图像、一个掩膜(非零像素区域表明该区域不会被填充)、一个种子像素以及新的颜色值来代替下限和上限阈值差的泛洪像素。泛洪填充以种子像素为起始,只要能在阈值的差异范围内添加新的像素,泛洪填充就会持续扩展。不同的阈值差异由元组 (R,G,B) 给出,结果如图 10-2 所示。
作为最后一个例子,我们来看 SURF 特征的提取,SURF 特征是 SIFT 特征的一个更快特征提取版,文献 1 引入。这里,我们也会展示怎样使用一些基本的 OpenCV绘制命令:
import cv2
读取图像
im = cv2.imread('empire.jpg')
下采样
im_lowres = cv2.pyrDown(im)
变换成灰度图像
gray = cv2.cvtColor(im_lowres,cv2.COLOR_RGB2GRAY)
检测特征点
s = cv2.SURF()
mask = uint8(ones(gray.shape))
keypoints = s.detect(gray,mask)
显示结果及特征点
vis = cv2.cvtColor(gray,cv2.COLOR_GRAY2BGR)
for k in keypoints::10:
cv2.circle(vis,(int(k.pt0),int(k.pt1)),2,(0,255,0),-1)
cv2.circle(vis,(int(k.pt0),int(k.pt1)),int(k.size),(0,255,0),2)
cv2.imshow('local descriptors',vis)
cv2.waitKey()

图 10-2:彩色图像泛洪填充。在左上角用单个种子进行泛洪填充,右图高亮区域标出了所有填充了的像素
读取图像后,如果没有给定新尺寸,则用 pyrDown() 进行下采样,创建一个尺寸为原图像大小一半的新图像,然后将该图像转换为灰度图像,并传递到一个 SURF 关键点检测对象;掩膜决定了在哪些区域应用关键点检测器。在画出检测结果时,我们将灰度图像转换成彩色图像,并用绿色通道画出检测到的关键点。我们在每到第十个关键点时循环一次,并在中心画一个圆环,每一个圆环显示出关键点的尺度(大小)。绘图函数 circle() 获取一幅图像、图像坐标(仅整数坐标)元组、半径、绘图的颜色元组以及线条粗细(-1 是实线圆环)。图 10-3 显示了提取出来的 SURF 特征。
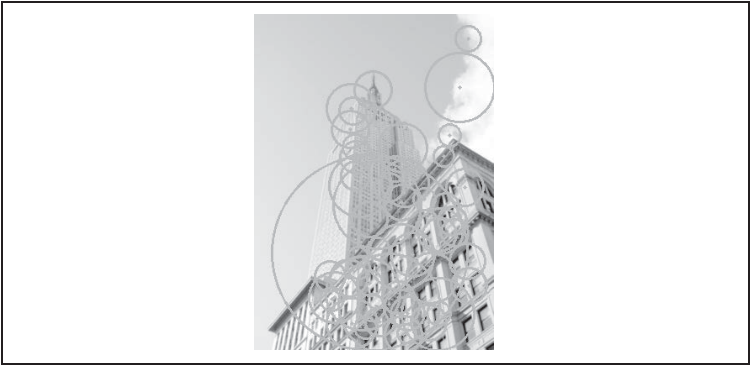
图 10-3:用 OpenCV 提取 SURF 特征并画出提取出来的 SURF 特征
10.3 处理视频
单纯使用 Python 来处理视频有些困难,因为需要考虑速度、编解码器、摄像机、操作系统和文件格式。目前还没有针对 Python 的视频库,使用 OpenCV 的 Python 接口是唯一不错的选择。在本节中,我们来看一些处理视频的基本示例。
10.3.1 视频输入
OpenCV 能够很好地支持从摄像头读取视频。下面给出了一个捕获视频帧并在OpenCV 窗口中显示这些视频帧的完整例子:
import cv2
设置视频捕获
cap = cv2.VideoCapture(0)
while True:
ret,im = cap.read()
cv2.imshow('video test',im)
key = cv2.waitKey(10)
if key == 27:
break
if key == ord(' '):
cv2.imwrite('vid_result.jpg',im)
捕获对象 VideoCapture 从摄像头或文件捕获视频。我们通过一个整数进行初始化,该整数为视频设备的 id;如果仅有一个摄像头与计算机相连接,那么该摄像头的 id为 0。read() 方法解码并返回下一视频帧,第一个变量 ret 是一个判断视频帧是否成功读入的标志,第二个变量则是实际读入的图像数组。函数 waitKey() 等待用户按键:如果按下的是 Esc 键(ASCII 码是 27)键,则退出应用;如果按下的是空格键,就保存该视频帧。
拓展上面的例子,将摄像头捕获的数据作为输入,并在 OpenCV 窗口中实时显示经模糊的(彩色)图像,我们只需对上面的例子做简单的修改:
import cv2
设置视频捕获
cap = cv2.VideoCapture(0)
获取视频帧,应用高斯平滑,显示结果
while True:
ret,im = cap.read()
blur = cv2.GaussianBlur(im,(0,0),5)
cv2.imshow('camera blur',blur)
if cv2.waitKey(10) == 27:
break
每一视频帧都会被传递给 GaussianBlur() 函数,该函数会用高斯滤波器对传入的该帧图像进行滤波。这里,我们传递的是彩色图像,所以 Gaussian Blur() 函数会录入对彩色图像的每一个通道单独进行模糊。该函数需要为高斯函数设定滤波器尺寸(保存在元组中)及标准差;在本例中标准差设为 5。如果该滤波器尺寸设为 0,则它由标准差自动决定,显示出的结果与图 10-4 相似。
图 10-4:作者撰写本章时的一幅经过模糊的视频截图
以同样的方式从文件读取视频,不过我们调用 VideoCapture() 获取视频时是以文件名作为输入的:
capture = cv2.VideoCapture('filename')
10.3.2 将视频读取到NumPy数组中
使用 OpenCV 可以从一个文件读取视频帧,并将其转换成 NumPy 数组。下面是一个从摄像头捕获视频并将视频帧存储在一个 NumPy 数组中的例子:
import cv2
设置视频捕获
cap = cv2.VideoCapture(0)
frames = \[\]
获取帧,存储到数组中
while True:
ret,im = cap.read()
cv2.imshow('video',im)
frames.append(im)
if cv2.waitKey(10) == 27:
break
frames = array(frames)
检查尺寸
print im.shape
print frames.shape
上述代码将每一视频帧数组添加到列表末,直到捕获结束。最终得到的数组会有帧数、帧高、帧宽及颜色通道数(3 个),打印出的结果如下:
(480, 640, 3)
(40, 480, 640, 3)
这里共记录了 40 帧。类似上面将视频数据存储在数组中对于视频处理是非常有帮助的,比如计算帧间差异以及跟踪。
10.4 跟踪
跟踪是在图像序列或视频里对其中的目标进行跟踪的过程。
10.4.1 光流
光流是目标、场景或摄像机在连续两帧图像间运动时造成的目标的运动。它是图像在平移过程中的二维矢量场。作为一种经典并深入研究了的方法,它在诸如视频压缩、运动估计、目标跟踪和图像分割等计算机视觉中得到了广泛的应用。
光流法主要依赖于三个假设。
(1) 亮度恒定 图像中目标的像素强度在连续帧之间不会发生变化。
(2) 时间规律 相邻帧之间的时间足够短,以至于在考虑运行变化时可以忽略它们之
间的差异。该假设用于导出下面的核心方程。
(3) 空间一致性 相邻像素具有相似的运动。
v =*u* ,*v* 是运动矢量,It 是时间偏导。对于图像中那些单个的点,该方程是线性方程组。由于 v包含两个未知变量,所以该方程是不可解的。通过强制加入空间一致性约束,则有可能获得该方程的解。在下面的 Lucas-Kanade 算法中,我们将看到怎样利用该假设。
OpenCV 包 含 了 一 些 光 流 实 现: 用 了 块 匹 配 的 CalcOpticalFlowBM();(这些只存在于旧的 cv 模块)的 CalcOpticalFlowHS();文献 中 的空间金字塔 Lucas-Kanade 算 法 calcOpticalFlowPyrLK();以及基于文献 的calcOpticalFlowFarneback()。最后一种被视为获取密集流场的最好方法之一。让我们看一个利用 calcOpticalFlowFarneback() 在视频中寻找运动矢量的例子(Lucas Kanade 光流法在下一节讲述)。
运行下面的脚本:
import cv2
def draw_flow(im,flow,step=16):
""" 在间隔分开的像素采样点处绘制光流 """
h,w = im.shape:2
y,x = mgridstep/2:h:step,step/2:w:step.reshape(2,-1)
fx,fy = flowy,x.T
创建线的终点
lines = vstack(x,y,x+fx,y+fy).T.reshape(-1,2,2)
lines = int32(lines)
创建图像并绘制
vis = cv2.cvtColor(im,cv2.COLOR_GRAY2BGR)
for (x1,y1),(x2,y2) in lines:
cv2.line(vis,(x1,y1),(x2,y2),(0,255,0),1)
cv2.circle(vis,(x1,y1),1,(0,255,0), -1)
return vis
设置视频捕获
cap = cv2.VideoCapture(0)
ret,im = cap.read()
prev_gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
while True:
获取灰度图像
ret,im = cap.read()
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
计算流
flow = cv2.calcOpticalFlowFarneback(prev_gray,gray,None,0.5,3,15,3,5,1.2,0)
prev_gray = gray
画出流矢量
cv2.imshow('Optical flow',draw_flow(gray,flow))
if cv2.waitKey(10) == 27:
break
在这个例子中,利用摄像头捕获图像,并对每个连续图像对进行光流估计。由calcOpticalFlowFarneback() 返回的运动光流矢量保存在双通道图像变量 flow 中。除了需要获取需要获取前一帧和当前帧,该函数还需要一系列参数。如果有兴趣可以查找相关的文献。辅助函数 draw_flow() 会在图像均匀间隔的点处绘制光流矢量,它利用 OpenCV 的绘图函数 line() 和 circle(),并用变量 step 控制流样本的间距。最终的结果如图 10-5 所示:圆环网格表示流样本的位置,带有线条的流矢量显示了每个样本点是怎样运动的。
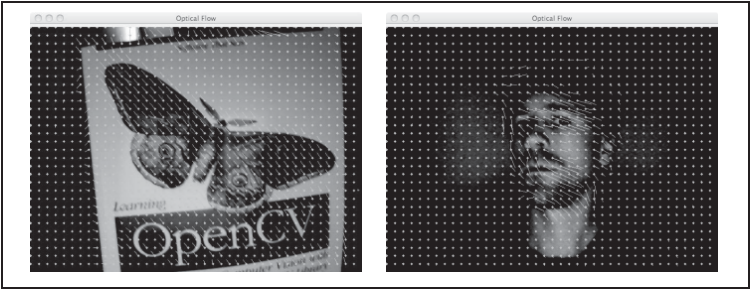
图 10-5:在书本平移和头部转动的视频上展示光流矢量(每隔 15 个像素采样一次)
10.4.2 Lucas-Kanade算法
跟踪最基本的形式是跟随感兴趣点,比如角点。对此,一次流行的算法是 Lucas Kanade 跟踪算法,它利用了稀疏光流算法。
Lucas-Kanade 跟踪算法可以应用于任何一种特征,不过通常使用一些角点,比如2.1 节的 Harris 角点。goodFeaturesToTrack() 函数采用 Shi 和 Tomasi 在文献 33 中设计的算法检测角点;角点是结构张量(Harris 矩阵)中有两个较大特征值的那些点,且更小的特征值要大于某个阈值。
如果基于每一个像素考虑,该光流方程组是欠定方程,即每个方程中含很多未知变量。利用相邻像素有相同运动这一假设,对于 n 个相邻像素,可以将这些方程写成如下系统方程:
标准的 Lucas-Kanade 跟踪适用于小位移;为了能够处理较大位移,需要采用分层的方法。在该情形下,光流可以通过对图像由粗到精采样计算得到。这就是 OpenCV函数 calcOpticalFlowPyrLK() 要做的事。
这些 Lucas-Kanade 函数包含在 OpenCV 中,让我们看看怎样利用这些函数建立一个Python 跟踪类。创建名为 lktrack.py 的文件,向其添加下面的类和构造函数:
import cv2
一些常数及默认参数
lk_params = dict(winSize=(15,15),maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT,10,0.03))
subpix_params = dict(zeroZone=(-1,-1),winSize=(10,10),
criteria = (cv2.TERM_CRITERIA_COUNT | cv2.TERM_CRITERIA_EPS,20,0.03))
feature_params = dict(maxCorners=500,qualityLevel=0.01,minDistance=10)
class LKTracker(object):
""" 用金字塔光流 Lucas-Kanade 跟踪类 """
def init(self,imnames):
""" 使用图像名称列表初始化 """
self.imnames = imnames
self.features = \[\]
self.tracks = \[\]
self.current_frame = 0
用一个文件名列表对跟踪对象进行初始化,变量 features 和 tracks 分别保存角点和对这些角点进行跟踪的位置,同时,我们也利用一个变量对当前帧进行跟踪。我们定义了三个字典变量用于特征提取、跟踪、和亚像素特征点的提炼。
在开始检测角点时,我们需要载入实际图像,并转换成灰度图像,提取"利用跟踪的好的特征"点。OpenCV 函数 goodFeaturesToTrack() 方法可以完成这一主要工作。将下面的 detect_points() 添加到 LKTracker 类中:
def detect_points(self):
""" 利用子像素精确度在当前帧中检测"利于跟踪的好的特征"( 角点 ) """
载入图像并创建灰度图像
self.image = cv2.imread(self.imnamesself.current_frame)
self.gray = cv2.cvtColor(self.image,cv2.COLOR_BGR2GRAY)
搜索好的特征点
features = cv2.goodFeaturesToTrack(self.gray, **feature_params)
提炼角点位置
cv2.cornerSubPix(self.gray,features, **subpix_params)
self.features = features
self.tracks = \[p for p in features.reshape((-1,2))]
self.prev_gray = self.gray
上述代码用 cornerSubPix() 提炼角点位置,并保存在成员变量 features 和 tracks中。需要注意的是,运行该函数会清除跟踪历史。
现在我们已经可以检测这些角点,接下来还需要对其进行跟踪。首先我们需要获得下一帧图像,然后应用 OpenCV 函数 calcOpticalFlowPyrLK() 找出这些点运动到哪里了,最后清除这些包含跟踪点的列表。下面的 track_points() 方法可以完成该过程:
def track_points(self):
""" 跟踪检测到的特征 """
if self.features != \[\]:
self.step() # 移到下一帧
载入图像并创建灰度图像
self.image = cv2.imread(self.imnamesself.current_frame)
self.gray = cv2.cvtColor(self.image,cv2.COLOR_BGR2GRAY)
#reshape() 操作,以适应输入格式
tmp = float32(self.features).reshape(-1, 1, 2)
计算光流
features,status,track_error = cv2.calcOpticalFlowPyrLK(self.prev_gray,
self.gray,tmp,None,**lk_params)
去除丢失的点
self.features = p for (st,p) in zip(status,features) if st
从丢失的点清楚跟踪轨迹
features = array(features).reshape((-1,2))
for i,f in enumerate(features):
self.tracksi.append(f)
ndx = i for (i,st) in enumerate(status) if not st
ndx.reverse()# 从后面移除
for i in ndx:
self.tracks.pop(i)
self.prev_gray = self.gray
下面定义一个辅助函数 step(),用于移动到下一视频帧:
def step(self,framenbr=None):
""" 移到下一帧。如果没有给定参数,直接移到下一帧 """
if framenbr is None:
self.current_frame = (self.current_frame + 1) % len(self.imnames)
else:
self.current_frame = framenbr % len(self.imnames)
该方法会跳转到一个给定的视频帧,如果没有给定参数则直接跳转到下一帧。
最后,我们还希望能够用 OpenCV 窗口和绘图函数画出最终的跟踪结果。添加draw() 方法到 LKTracker 类:
def draw(self):
""" 用 OpenCV 自带的画图函数画出当前图像及跟踪点,按任意键关闭窗口 """
用绿色圆圈画出跟踪点
for point in self.features:
cv2.circle(self.image,(int(point00),int(point01)),3,(0,255,0),-1)
cv2.imshow('LKtrack',self.image)
cv2.waitKey()
现在,我们用 OpenCV 函数实现了一个完整独立的跟踪系统。
- 使用跟踪器
我们将该跟踪类用于真实的场景中。下面的脚本初始化一个跟踪对象,对视频序列
进行角点检测、跟踪,并画出跟踪结果:
import lktrack
imnames = 'bt.003.pgm', 'bt.002.pgm', 'bt.001.pgm', 'bt.000.pgm'
创建跟踪对象
lkt = lktrack.LKTracker(imnames)
在第一帧进行检测,跟踪剩下的帧
lkt.detect_points()
lkt.draw()
for i in range(len(imnames)-1):
lkt.track_points()
lkt.draw()
每次画出一帧,并显示当前跟踪到的点,按任意键会转移到序列的下一帧。图 10-6显示了牛津 corridor 序列(牛津对多视图数据集中的一个序列,参见 http://www.robots.ox.ac.uk/\~vgg/data/data-mview.html)的前 4 幅图像的跟踪结果。
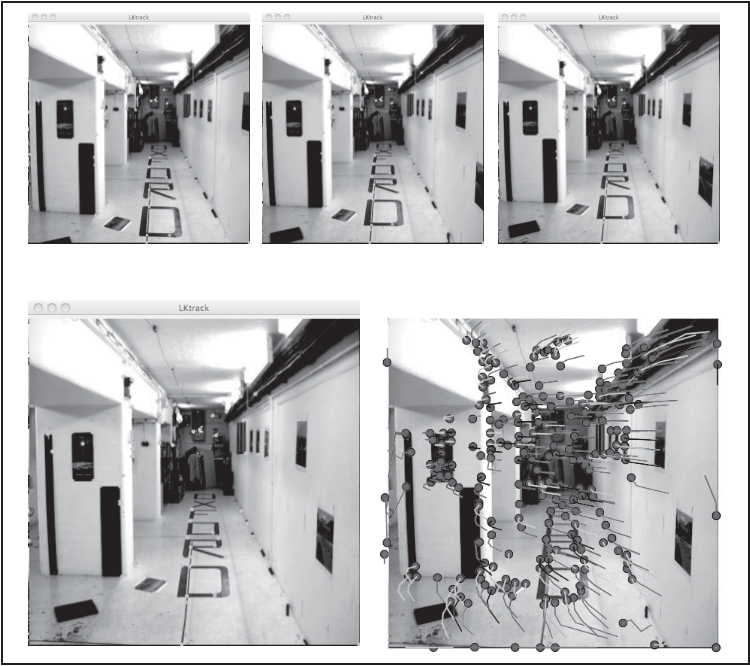
图 10-6:通过 LKTrack 类利用 Lucas-Kanade 算法进行跟踪
- 使用发生器
将下面的方法添加到 LKTracker 类:
def track(self):
""" 发生器,用于遍历整个序列 """
for i in range(len(self.imnames)):
if self.features == \[\]:
self.detect_points()
else:
self.track_points()
创建一份 RGB 副本
f = array(self.features).reshape(-1,2)
im = cv2.cvtColor(self.image,cv2.COLOR_BGR2RGB)
yield im,f
上面的方法创建一个发生器,可以使遍历整个序列并将获得的跟踪点和这些图像以RGB 数组保存,以方便画出跟踪结果。将它用于经典的牛津"dinosaur"序列(也来源于上面提到的多视图数据集),并画出这些点及这些点的跟踪结果,代码如下:
import lktrack
imnames = ['viff.000.ppm', 'viff.001.ppm',
'viff.002.ppm', 'viff.003.ppm', 'viff.004.ppm']
用 LKTracker 发生器进行跟踪
lkt = lktrack.LKTracker(imnames)
for im,ft in lkt.track():
print 'tracking %d features' % len(ft)
画出轨迹
figure()
imshow(im)
for p in ft:
plot(p0,p1,'bo')
for t in lkt.tracks:
plot(p\[0 for p in t],p\[1 for p in t])
axis('off')
show()
该发生器使前面定义的跟踪类的使用变得非常容易,并且完全向用户隐藏了OpenCV 里的函数。该示例生成的结果如图 10-6 右下图和图 10-7 所示。
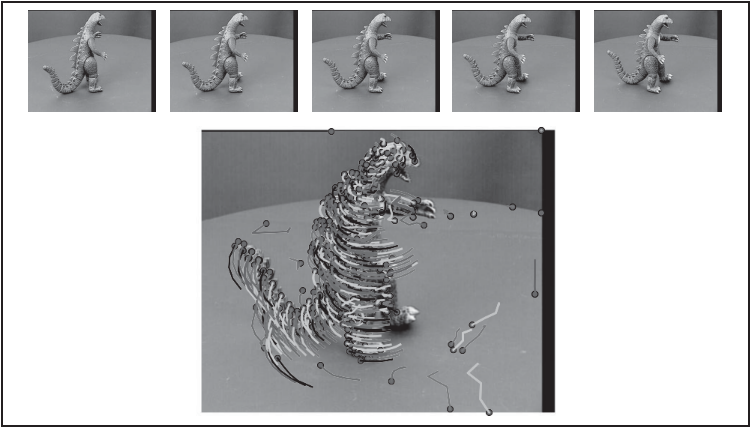
图 10-7:用 Lucas-Kanade 跟踪算法在转盘序列上跟踪并画出跟踪点的轨迹
10.5 更多示例
OpenCV 自带很多关于如何使用 Python 接口的有用示例。这些示例在子目录samples/python2/ 中,用这些例子来熟悉 OpenCV 是一种非常好的方式。这里选择了一些来说明 OpenCV 的一些其他功能。
10.5.1 图像修复
对图像丢失或损坏的部分进行重建的过程叫做修复,既包括以复原为目的的对图像丢失数据或损坏部分进行恢复的算法,也包括在照片编辑应用程序中去除红眼或物体的算法。典型的例子是,图像的一个区域标记为"破损",并需要利用余下的数据对该区域进行填补。
试着运行下面的命令:
$ python inpaint.py empire.jpg
运行上面的命令会打开一个交互窗口,在该窗口中你可以画一些需要修复的区域。最终修复的结果会在一个单独的窗口中显示出来,图 10-8 展示了一个示例。
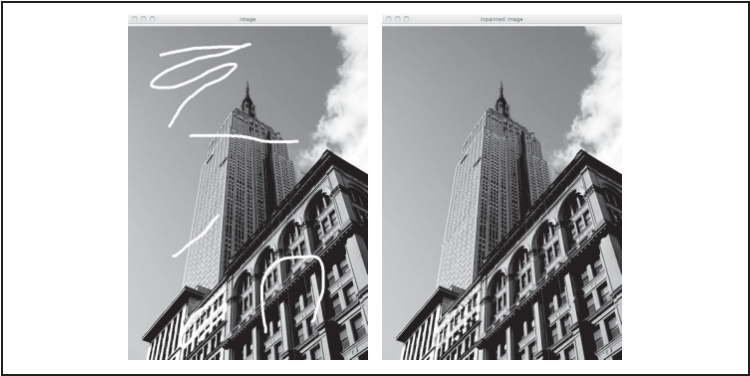
图 10-8:用 OpenCV 进行图像修复的示例。左图显示了由用户标记的"破损"区域。右图显示了经过图像修复后的结果
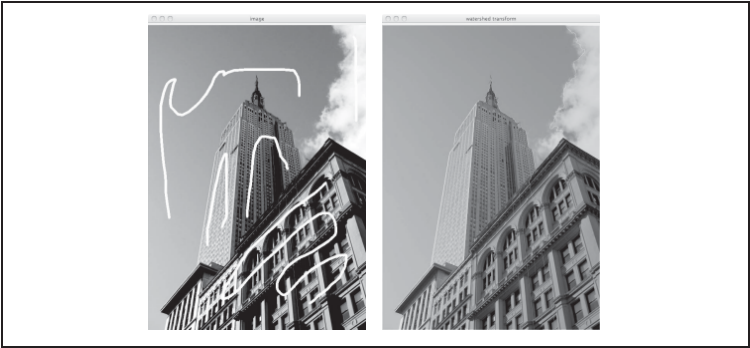
10.5.2 利用分水岭变换进行分割
OpenCV 中的分水岭变换使用 Meyer 22 的算法,可以使用下面的命令:
$ python watershed.py empire.jpg
该命令会打开一个交互窗口,你可以在该窗口中画一些种子区域作为输入。图 10-9右图显示了用分水岭变换进行分割后的结果,在变换后的灰度图像中,不同颜色代表分割覆盖的区域。
10.5.3 利用霍夫变换检测直线
OpenCV 可以利用该方法进行直线检测 1 ,运行下面的命令:
$ python houghlines.py empire.jpg
它会给出图 10-10 中的两个窗口。第一个窗口显示了原图像进行灰度变换后的灰度图像,第二个显示了检测到的直线边缘,这些检测出来的直线在参数空间获得的投票最多。注意,这些直线通常是无限长的;如果你想在图像中找到线段的端点,可以使用边缘映射找到这些端点。