文章目录
-
- 一、虚拟计算器项目
-
- [1.1 打开摄像头,正常显示画面](#1.1 打开摄像头,正常显示画面)
- [1.2 画出虚拟计算器](#1.2 画出虚拟计算器)
- [1.3 检测手部动作](#1.3 检测手部动作)
- [1.4 计算逻辑](#1.4 计算逻辑)
- [1.5 完整代码](#1.5 完整代码)
- 二、目标追踪
-
- [2.1 目标追踪简介](#2.1 目标追踪简介)
-
- [2.1.1 评测数据集------OTB&VOT](#2.1.1 评测数据集——OTB&VOT)
- [2.1.2 经典跟踪算法](#2.1.2 经典跟踪算法)
- [2.1.3 基于核相关滤波的跟踪算法](#2.1.3 基于核相关滤波的跟踪算法)
- [2.1.4 深度学习算法](#2.1.4 深度学习算法)
- [2.1.5 long-term](#2.1.5 long-term)
- [2.1.6 Opencv目标追踪算法简介](#2.1.6 Opencv目标追踪算法简介)
- [2.2 示例一:车辆追踪](#2.2 示例一:车辆追踪)
-
- [2.2.1 定义辅助函数](#2.2.1 定义辅助函数)
- [2.2.2 创建Tracker实例](#2.2.2 创建Tracker实例)
- [2.2.3 读取视频,定义初始边界框](#2.2.3 读取视频,定义初始边界框)
- [2.2.4 逐帧读取并追踪目标](#2.2.4 逐帧读取并追踪目标)
- [2.3 案例二:体育赛事](#2.3 案例二:体育赛事)
一、虚拟计算器项目
1.1 打开摄像头,正常显示画面
- 直接显示时窗口很小,可以通过resizeWindow调整显示窗口大小,也可以直接通过设置视频窗口大小达到同样的效果
- 摄像头显示的图像,和实际中的画面是呈镜面相反的,可以通过
flip函数进行翻转。
python
# 从打开摄像头, 显示每一帧图片开始
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
# 设置窗口大小
cap.set(3, 1280)
cap.set(4, 720)
while True:
flag, img = cap.read()
if flag:
# 翻转摄像头显示的画面,flipCode>0表示水平翻转。
img = cv2.flip(img, 1)
cv2.imshow('img', img)
key = cv2.waitKey(1)
# 按下ESC键,关闭窗口
if key == 27:
break
else:
print('摄像头打开失败')
break
cap.release()
cv2.destroyAllWindows()1.2 画出虚拟计算器
- 计算器的每个按键格子,通过先画灰色方框,再画黑色方框线的方式呈现
- 按键内部的数字通过
cv2.putText方法实现
下面是画出一个按键格的效果:
python
while True:
flag, img = cap.read()
if flag:
# 翻转摄像头显示的画面,flipCode>0表示水平翻转。
img = cv2.flip(img, 1)
# 先画一个实心的灰色矩形
cv2.rectangle(img, (1000, 300), (1000 + 100, 300 + 100), (225, 225, 225), -1)
# 再画矩形的边框
cv2.rectangle(img, (1000, 300), (1000 + 100, 300 + 100), (0, 0, 0), 3)
# 填入按键数字
cv2.putText(img, "0", (1000 + 30, 300 + 70), cv2.FONT_HERSHEY_PLAIN, 2, (50, 50, 50), 2)
cv2.imshow('img', img)
key = cv2.waitKey(1)
if key == 27:
break
else:
print('摄像头打开失败')
break
cap.release()
cv2.destroyAllWindows()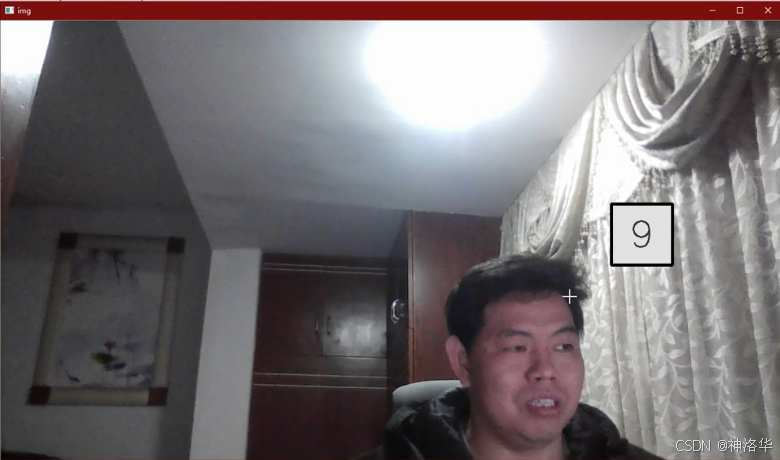
接下来,我们要通过画出多个按键的方式画出整个虚拟计算器,所以需要先创建一个button类来进行实现。
python
# 创建button类
class Button:
def __init__(self, pos, width, height, value):
self.pos = pos
self.width = width
self.height = height
self.value = value
def draw(self, img):
# 绘制一个计算器的小格子
# 先画一个实心的灰色矩形
cv2.rectangle(img, (self.pos[0], self.pos[1]), (self.pos[0] + self.width, self.pos[1] + self.height), (225, 225, 225), -1)
# 再画矩形的边框
cv2.rectangle(img, (self.pos[0], self.pos[1]), (self.pos[0] + self.width, self.pos[1] + self.height), (0, 0, 0), 3)
cv2.putText(img, self.value, (self.pos[0] + 30, self.pos[1] + 70), cv2.FONT_HERSHEY_PLAIN, 2, (50, 50, 50), 2)测试一下,显示正常。
python
while True:
flag, img = cap.read()
if flag:
# 翻转摄像头显示的画面,flipCode>0表示水平翻转。
img = cv2.flip(img, 1)
Button((1000,300),100,100,'9').draw(img)
cv2.imshow('img', img)
...
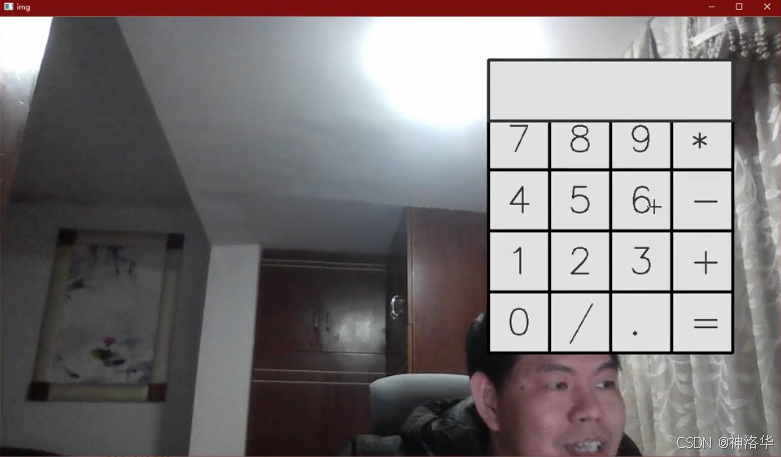
...下面通过for循环画出计算器的16格按键,最后通过硬编码方式画出计算器的结果显示窗格。
python
button_values = [['7', '8', '9', '*'],
['4', '5', '6', '-'],
['1', '2', '3', '+'],
['0', '/', '.', '=']]
button_list = []
for x in range(4):
for y in range(4):
x_pos = x * 100 + 800
y_pos = y * 100 + 150
button = Button((x_pos, y_pos), 100, 100, button_values[y][x])
button_list.append(button)
while True:
flag, img = cap.read()
if flag:
# 翻转摄像头显示的画面,flipCode>0表示水平翻转。
img = cv2.flip(img, 1)
for button in button_list:
button.draw(img)
# 创建显示结果的窗口,宽为1000*4,高度100不变
cv2.rectangle(img, (800, 70), (800 + 400, 70 + 100), (225, 225, 225), -1)
cv2.rectangle(img, (800, 70), (800 + 400, 70 + 100), (50, 50, 50), 3)
cv2.imshow('img', img)
...
...
1.3 检测手部动作
我们可以直接使用cvzone模块进行手的检测和追踪。CVZone 是一个开源的 Python 库,它基于 OpenCV 和 MediaPipe,简化了计算机视觉任务的实现,集成了多个计算机视觉库的功能,包括:
- 手部跟踪(Hand Tracking)
- 姿态估计(Pose Estimation)
- 面部检测(Face Detection)
- 物体跟踪(Object Tracking)
- 物体检测(Object Detection)
手部检测是 CVZone 的核心功能之一,手部检测功能基于 MediaPipe 的 Hand Tracking 模型,可以实时检测和跟踪手部的21个关键点。这些关键点包括手指的关节和手掌的部分。使用时,需要先初始化 HandDetector 对象:
python
detector = HandDetector(
staticMode=False, # 是否启用静态模式。对于实时视频处理,选择False;处理静态图片选择True
maxHands=2, # 设定一次可以检测的最大手数,如果你只需要检测一只手,可以将这个参数设为 1,这样可以提高检测效率。
modelComplexity=1, # 手部标记模型的复杂度,0或1
detectionCon=0.5, # 手部检测的最低置信度阈值,置信度越高,检测结果越可靠;置信度越低,可能导致检测不到手部或者误检测。
minTrackCon=0.5, # 跟踪置信度阈值,用此参数来控制追踪的可靠性。数值越高,要求手部的追踪效果越精确。
)HandDetector 类提供了一系列方法,方便开发者获取手部的各种信息和处理手势识别:
findHands(image, draw=True,flipType=True):检测图像中的手部,返回手部关键点及其相关数据。draw=True表示在图像上绘制检测结果(关键点和包围框)。flipType=True:检测到的手的类型后,是否进行翻转。hands,image:返回值。前者是检测到的手部信息列表。每个手的信息包括lmList(21个关键点)、bbox(包围框)、center(中心点)、type: 手的类型("Left" 或 "Right")。image是带有绘制结果的图像。
findDistance(p1, p2, image=None):计算两个关键点之间的欧几里得距离。- 默认
image=None,如果提供,会在图像上显示这两个点的连接线和距离。 - 返回值为
distance, info, img,即计算出的距离、两个点及其中心点的点坐标信息和图像(如果有绘制)
- 默认
fingersUp(hand):判断手指的伸直与弯曲状态。- hand:包含手部信息的字典,即来自 findHands() 的返回值
- 返回一个列表,表示每根手指的状态,
1代表手指伸直,0代表手指弯曲
下面是简单的效果展示:
python
# 需要安装cvzone和mediapipe
# pip install cvzone mediapipe
from cvzone.HandTrackingModule import HandDetector
# 创建hand detector
detector = HandDetector(maxHands=1, detectionCon=0.8)
while True:
flag, img = cap.read()
if flag:
# 翻转摄像头显示的画面,flipCode>0表示水平翻转。
img = cv2.flip(img, 1)
# 画面已经被翻转过,所以需要设置flipType=False
hands, img = detector.findHands(img, flipType=False)
if hands:
print(hands)
# 获取第一只手的信息
hand1 = hands[0]
lmList = hand1["lmList"] # 21 个关键点坐标
bbox = hand1["bbox"] # 包围框
centerPoint = hand1["center"] # 手掌中心
handType = hand1["type"] # 左手或右手
# 显示手指状态
fingers = detector.fingersUp(hand1)
# 计算大拇指和食指之间的距离
distance, info, img = detector.findDistance(4, 8, img)
...
cv2.imshow('img', img)
...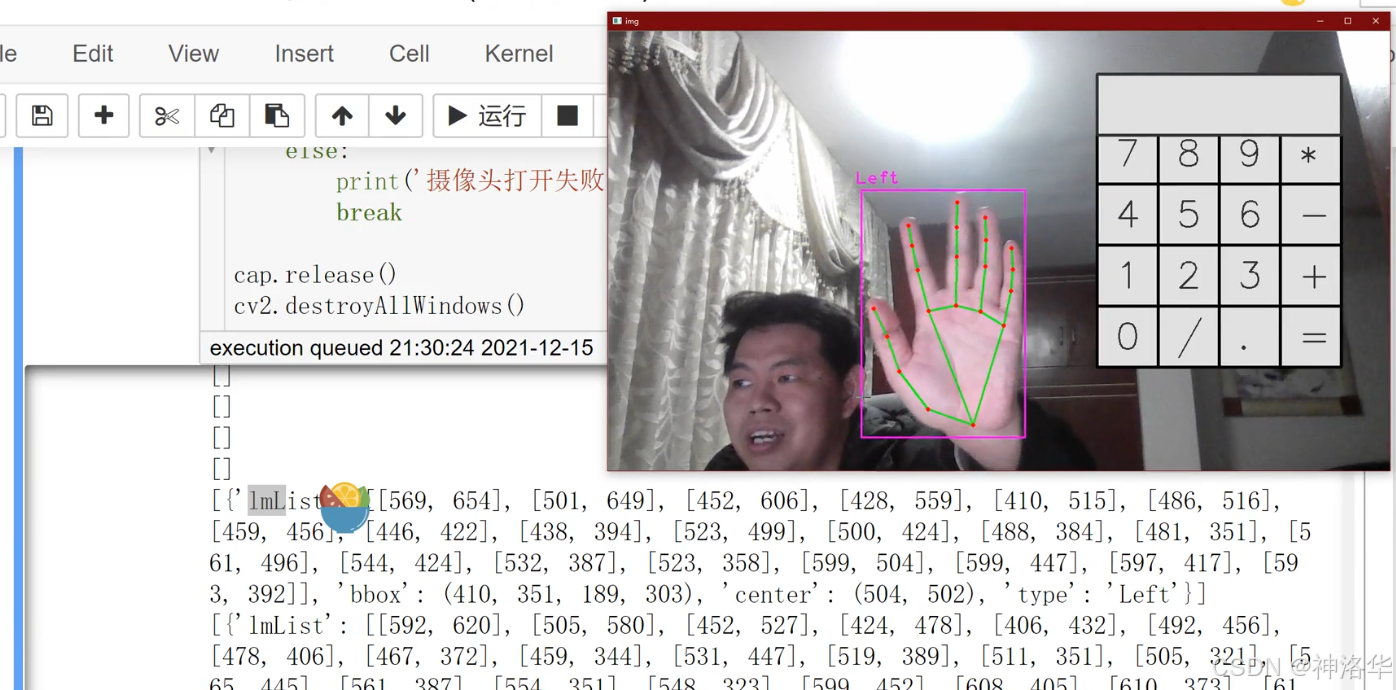
可以看到,画面中没有手的时候,hands为空列表;画面检测出手之后,hands列表里,是图中手部那些检测点的位置坐标等信息。另外需要注意的是,一定要在画出计算器之前进行手的检测,否则当手移动到计算器里面,会检测失败。
1.4 计算逻辑
- 点击动作判断 :当食指和中指夹紧一次(距离变短)就认为是点击了一次按键。如果是左手的话,食指和中指指尖的坐标是
lmList中的第8个和第12个元素。通过detector.findDistance可以直接计算其距离。测试中两指张开距离为90-110左右,两指夹紧距离为38-45左右。 - 在Button类中添加一个方法
check_click(self, x, y),- 判断食指坐标是否在某个按键框内。
- 如果在某个按键框,且食指和中指夹紧(距离小于50),就认为是点击了此按键,在按键内部填充一个白色的矩形,以此显示点击成功。
- 使用注释的方法,在计算结果显示框显示此按键的值。
- 初始化空字符串
equation,用于存储计算式。当遇到"="号时,使用eval(equation)可直接计算字符串数字的算式结果。
python
# 创建button类
class Button:
...
def check_click(self, x, y):
if self.pos[0] < x < self.pos[0] +self.width and self.pos[1] < y < self.pos[1] + self.height:
cv2.rectangle(img, (self.pos[0] + 3, self.pos[1] + 3),
(self.pos[0] + self.width -3, self.pos[1]+self.height -3),
(255, 255, 255), -1)
cv2.putText(img, self.value, (self.pos[0]+25, self.pos[1] + 80), cv2.FONT_HERSHEY_PLAIN, 5, (0, 0, 0), 5)
return True
else:
return False1.5 完整代码
python
# 创建button类
class Button:
def __init__(self, pos, width, height, value):
self.pos = pos
self.width = width
self.height = height
self.value = value
def draw(self, img):
# 绘制一个计算器的小格子
# 先画一个实心的灰色矩形
cv2.rectangle(img, (self.pos[0], self.pos[1]), (self.pos[0] + self.width, self.pos[1] + self.height), (225, 225, 225), -1)
# 再画矩形的边框
cv2.rectangle(img, (self.pos[0], self.pos[1]), (self.pos[0] + self.width, self.pos[1] + self.height), (0, 0, 0), 3)
cv2.putText(img, self.value, (self.pos[0] + 30, self.pos[1] + 70), cv2.FONT_HERSHEY_PLAIN, 2, (50, 50, 50), 2)
def check_click(self, x, y):
if self.pos[0] < x < self.pos[0] +self.width and self.pos[1] < y < self.pos[1] + self.height:
cv2.rectangle(img, (self.pos[0] + 3, self.pos[1] + 3),
(self.pos[0] + self.width -3, self.pos[1]+self.height -3),
(255, 255, 255), -1)
cv2.putText(img, self.value, (self.pos[0]+25, self.pos[1] + 80), cv2.FONT_HERSHEY_PLAIN, 5, (0, 0, 0), 5)
return True
else:
return False当前代码运行时还有一个问题,即当手指夹紧时,按键会被不停的重复点击,因为检测点击动作只是简单的判断手指距离小于50且在按键框内。有两个改进思路:
- 手指张开之后再夹紧才被算作一次点击动作。这样需要重写check_click方法,并加入distance参数,每一帧都不停的进行检测、计算。
- 添加一个延迟计数变量
delay_counter并初始化为0,当第一次检测到手指在某个按键框内时,delay_counter=0,点击有效,正常进行后续操作。完毕之后,设置delay_counter=1。然后再设置一个使delay_counter可以重新归零的代码就行。
python
import numpy as np
import cv2
from cvzone.HandTrackingModule import HandDetector
import time
cap = cv2.VideoCapture(0)
# 设置窗口大小.
cap.set(3, 1280)
cap.set(4, 720)
button_values = [['7', '8', '9', '*'],
['4', '5', '6', '-'],
['1', '2', '3', '+'],
['0', '/', '.', '=']]
button_list = []
for x in range(4):
for y in range(4):
x_pos = x * 100 + 800
y_pos = y * 100 + 150
button = Button((x_pos, y_pos), 100, 100, button_values[y][x])
button_list.append(button)
# 创建hand detector
detector = HandDetector(maxHands=1, detectionCon=0.8)
equation = ''
delay_counter = 0
while True:
flag, img = cap.read()
# 摄像头显示的画面和真实画面反掉了,要进行水平翻转
img = cv2.flip(img, 1)
# 检测手, 注意一定要在还没有绘制button之前去检测手.
hands, img = detector.findHands(img, flipType=False)
if flag:
# 绘制计算器
for button in button_list:
button.draw(img)
# 创建计算器结果显示窗口
cv2.rectangle(img, (800, 70), (800 + 400, 70 + 100), (225, 225, 225), -1)
cv2.rectangle(img, (800, 70), (800 + 400, 70 + 100), (50, 50, 50), 3)
if hands:
# 取出食指和中值的点, 计算两者的距离
lmlist = hands[0]['lmList']
# 最新版本的cvzone中,lmList坐标是三个值x,y,z,取出前两个值。
lmlist =[x[:2] for x in lmlist]
length, _, img = detector.findDistance(lmlist[8], lmlist[12], img)
# 取出食指坐标
x, y = lmlist[8]
# 根据食指和中指之间的距离进行判断, 如果小于50, 我们认为是进行了点击操作.
if length < 50 and delay_counter == 0:
for i, button in enumerate(button_list):
if button.check_click(x, y):
# 说明是一个正确点击. 应该要把点中的数字显示在窗口上.
value = button_values[int(i % 4)][int(i / 4)]
# 如果是'=', 说明要计算了.
if value == '=':
try:
equation = str(eval(equation))
except Exception:
# 非法的数学公式,需要重新输入
equation = ''
else:
# 字符串的拼接
equation += value
# sleep并不能完全解决重复点击的问题
# time.sleep(0.1)
delay_counter = 1
# 重置delay_counter, 避免短时间重复点击
# cv2.waitKey(1)是每毫秒检测一次,设置10毫秒之后才归零一次。
if delay_counter != 0:
delay_counter += 1
if delay_counter > 10:
delay_counter = 0
cv2.putText(img, equation, (810, 130), cv2.FONT_HERSHEY_PLAIN, 3, (0, 0, 0), 3)
cv2.imshow('img', img)
key = cv2.waitKey(1)
if key == ord('q'):
break
elif key == ord('c'):
# 清空输出框
equation = ''
else:
print('摄像头打开失败')
break
cap.release()
cv2.destroyAllWindows()二、目标追踪
2.1 目标追踪简介
2.1.1 评测数据集------OTB&VOT
目标视觉跟踪(Visual Object Tracking)是计算机视觉领域的一个重要问题,目前广泛应用在体育赛事转播、安防监控和无人机、无人车、机器人等领域。
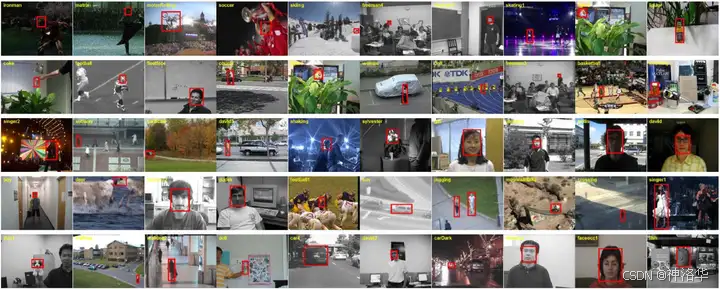
OTB50是一个包含50个视频序列的数据集,都经过人工标注,首次于2013年提出。这些视频序列涵盖了各种挑战,如光照变化、尺度变化、遮挡等。2015年提出了OTB100,包含了100个视频序列,其中涵盖了OTB50的所有序列。相关的数据集和测试代码库可以在Visual Tracker Benchmark的官方网站下载。
论文《Object tracking benchmark》总结了2012年及之前的29个顶尖的tracker,其速度与发表时间为:
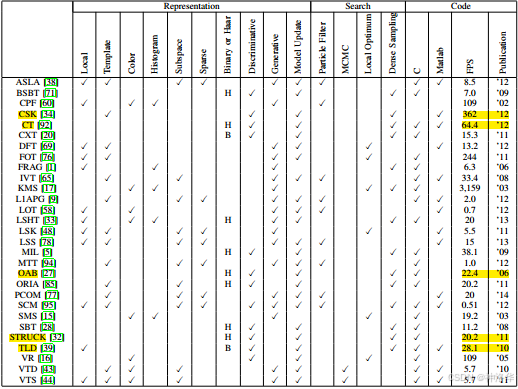
在OTB100数据集上的结果为:
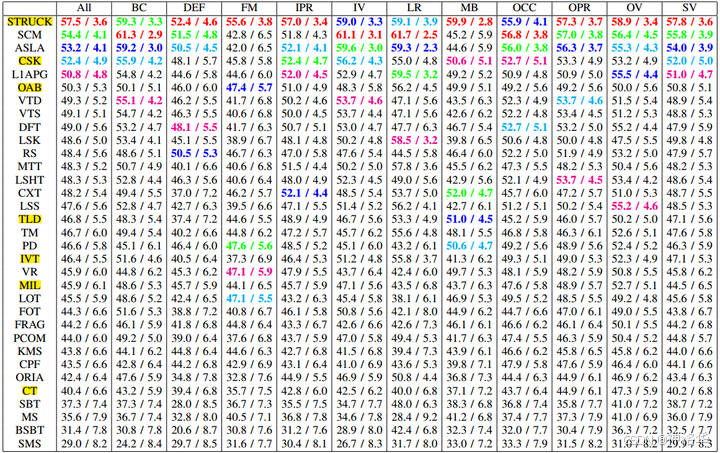
Struck, SCM, ASLA的性能比较高,排在前三;CSK第一次向世人展示了相关滤波的潜力,排第四还有362FPS。
目前比较常用的数据库除了OTB,还有VOT。VOT2015和VOT2016都包括60个序列,区别是OTB包括25%的灰度序列,但VOT都是彩色序列,这也是造成很多颜色特征算法性能差异的原因,两个库的评价指标不一样。对于一个tracker,如果论文在两个库(最好是OTB100和VOT2016)上都结果上佳,那肯定是非常优秀的。如果只跑了一个,个人更偏向于VOT2016,因为序列都是精细标注,且评价指标更好。
2012年以前的算法基本就是这样,自从2012年AlexNet问世以后,CV各个领域都有了巨大变化。按照时间顺序,目标跟踪的方法经历了从经典算法 到基于核相关滤波算法 ,再到基于深度学习的跟踪算法的过程。
2.1.2 经典跟踪算法
早期的目标跟踪算法主要根据目标建模或者对目标特征进行跟踪,主要有两种:基于目标模型建模的方法和基于搜索的方法。
基于目标模型建模的方法:这种方法的核心在于建立一个目标的外观模型,并在后续帧中匹配该模型以定位目标。
- 区域匹配 :
- 模板匹配:将目标在初始帧中的图像区域作为模板,在后续帧中通过滑动窗口的方式搜索与模板最相似的区域。
- 相关匹配:计算目标模板与搜索区域之间的相关性,通过相关性评分来确定目标位置。
- 特征点跟踪 :
- SIFT(尺度不变特征变换):提取图像中的关键点,并生成这些点的描述符,这些描述符在图像缩放和旋转时保持不变。
- SURF(加速稳健特征):类似于SIFT,但计算更快,对图像的噪声和光照变化更加稳健。
- Harris角点检测:检测图像中的角点,这些角点在目标跟踪中作为特征点进行匹配。
- 基于主动轮廓的跟踪算法 :
- snakes算法:通过能量最小化过程使轮廓形变,以匹配目标边缘。
- 光流法 :利用图像序列中像素亮度的时空连续性,估计像素的运动轨迹,从而跟踪目标。光流法适用的范围较小, 需要满足三种假设:
- 图像的光照强度保持不变;
- 空间一致性, 即每个像素在不同帧中相邻点的位置不变, 这样便于求得最终的运动矢量;
- 时间连续.光流法适用于目标运动相对于帧率是缓慢的, 也就是两帧之间的目标位移不能太大。
基于搜索的方法:这种方法不是直接在整个图像上搜索目标,而是在预测的目标位置附近进行搜索,从而提高实时性。
- 预测算法 :
- Kalman滤波:一种最优估计算法,可以预测目标在下一帧的位置,并减少搜索范围。
- 粒子滤波(Particle Filter):通过一系列随机样本(粒子)来表示目标的状态后验概率分布,适合处理非线性非高斯的动态系统。以跟踪为例,首先对跟踪目标进行建模,并定义一种相似度度量确定粒子与目标的匹配程度。在目标搜索的过程中,它会按照一定的分布(比如均匀分布或高斯分布)撒一些粒子,统计这些粒子的相似度,确定目标可能的位置。在这些位置上,下一帧加入更多新的粒子,确保在更大概率上跟踪上目标。
- 内核方法 :
- Meanshift:通过迭代方式寻找数据集中最密集的区域,用于跟踪目标。该方法利用目标的颜色直方图,通过迭代逐步收敛到目标位置。Meanshift 适用于目标的色彩模型和背景差异比较大的情形,早期也用于人脸跟踪。由于 Meanshift 方法的快速计算,它的很多改进方法也一直适用至今。
- Camshift(连续自适应均值漂移):在Meanshift的基础上加入了目标大小和方向的变化,使其能够适应目标外观的变化。
基于目标模型建模的方法在目标外观变化不大时效果较好,但计算量大,实时性较差。基于搜索的方法通过缩小搜索范围,提高了实时性,但在目标快速运动或外观发生较大变化时,跟踪效果可能受到影响。
另外,这些方法没有将背景信息考虑在内, 导致在目标遮挡, 光照变化以及运动模糊等干扰下容易出现跟踪失败。随着技术的发展,基于深度学习的跟踪算法逐渐成为主流,它们在处理复杂场景和目标外观变化方面表现出色。
2.1.3 基于核相关滤波的跟踪算法
人们将通信领域的相关滤波(衡量两个信号的相似程度)引入到了目标跟踪中,一些基于相关滤波的跟踪算法(MOSSE、CSK、KCF、BACF、SAMF)也随之产生, 速度可以达到数百帧每秒,可以广泛地应用于实时跟踪系统中。
经典的高速相关滤波类跟踪算法有CSK,KCF/DCF,CN。KCF/DCF算法在OTB50上Precision和FPS碾压了OTB50上最好的Struck,是目标跟踪领域的第一篇相关滤波类方法,真正第一次显示了相关滤波的潜力。
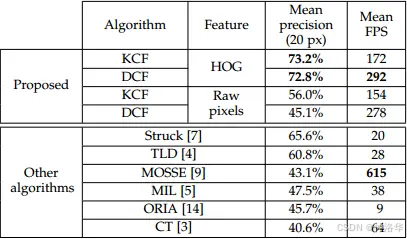
和KCF同一时期的还有个CN,在2014'CVPR上引起剧烈反响的颜色特征方法,其实也是CSK的多通道颜色特征改进算法。从MOSSE(615)到 CSK(362) 再到 KCF(172FPS),DCF(292FPS),CN(152FPS),CN2(202FPS),速度虽然是越来越慢,但效果越来越好,而且始终保持在高速水平。
到了VOT2014竞赛 VOT2014 Benchmark 。这一年有25个精挑细选的序列,38个算法。此时深度学习的战火还没有烧到tracking,前三名都是相关滤波CF类方法,区别就是加了多尺度检测和子像素峰值估计:
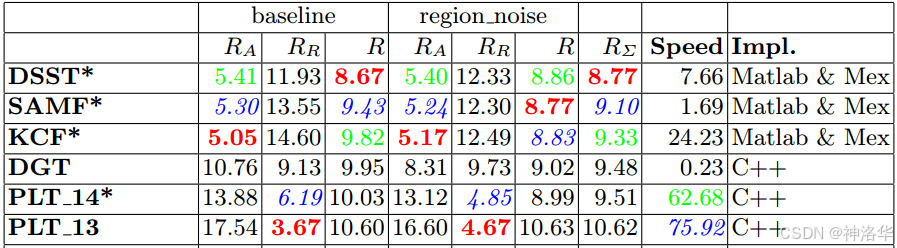
前三名除了特征略有差异,核心都是KCF为基础扩展了多尺度检测。尺度变化是跟踪中比较基础和常见的问题,前面介绍的KCF/DCF和CN都没有尺度更新,如果目标缩小,滤波器就会学习到大量背景信息,如果目标扩大,滤波器就跟着目标局部纹理走了,这两种情况都很可能出现非预期的结果,导致漂移和失败。
SAMF 基于KCF,特征是HOG+CN,多尺度方法是平移滤波器在多尺度缩放的图像块上进行目标检测,取响应最大的那个平移位置及所在尺度。另外DSST只用了HOG特征,DCF用于平移位置检测,又专门训练类似MOSSE的相关滤波器检测尺度变化,开创了平移滤波+尺度滤波。

以上就是两种推荐的尺度检测方法,以后简称为类似DSST的多尺度和类似SAMF的多尺度。如果更看重速度,加速版的fDSST,和仅3个尺度的SAMF(如VOT2014中的KCF)就是比较好的选择;如果更看重精确,33个尺度的DSST,及7个尺度的SAMF就比较合适。
2.1.4 深度学习算法
总体来说,相关滤波类方法对快速变形和快速运动情况的跟踪效果不好。随着深度学习方法的广泛应用, 人们开始考虑将其应用到目标跟踪中。在大数据背景下,利用深度学习训练网络模型,得到的卷积特征输出表达能力更强。
VOT2015竞赛 VOT2015 Challenge | Home ,这一年有60个精挑细选的序列,62个tracker。最大看点是深度学习开始进击tracking领域,MDNet直接拿下当年的冠军,而结合深度特征的相关滤波方法DeepSRDCF是第二名,主要解决边界效应的SRDCF仅HOG特征排在第四:

除了上面介绍的深度学习和相关滤波,还有结合object proposals(类物体区域检测)的EBT排第三。实时算法推荐Mean-Shift类颜色算法ASMS和DAT。此时排在第9的那个Struck已经不是原来的Struck了。除此之外,经典方法如OAB, STC, CMT, CT, NCC等都排在倒数位置, 已经被远远甩在后面。
到了VOT2016竞赛,深度学习已经雄霸天下了,8个纯CNN方法和6个结合深度特征的CF方法大都名列前茅,还有一片的CF方法。举办方公开了他们能拿到的38个tracker,部分tracker代码和主页下载地址为VOT2016 Challenge | Trackers。

高亮标出来了前面介绍过的或比较重要的方法,结合多层深度特征的相关滤波C-COT排第一名,而CNN方法TCNN是VOT2016的冠军,作者也是VOT2015冠军MDNet,纯颜色方法DAT和ASMS都在中等水平(其实两种方法实测表现非常接近)。
再来看速度,SMACF(排名25)和ASMS(排名32))都非常快,排在前10的方法中也有两个速度比较快,分别是Staple(排名第5),和其改进算法排第9的STAPLE+(排名第9,推荐实时算法)。
下图是相关滤波和是深度学习两类算法的介绍简图:
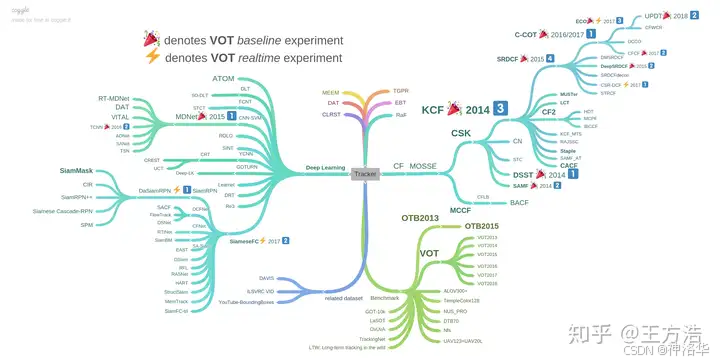
- 相比于光流法、Kalman、Meanshift等传统算法,相关滤波类算法跟踪速度更快,深度学习类方法精度高.
- 具有多特征融合以及深度特征的追踪器在跟踪精度方面的效果更好.
- 使用强大的分类器是实现良好跟踪的基础.
- 尺度的自适应以及模型的更新机制也影响着跟踪的精度.
2.1.5 long-term
以前提到的很多CF算法,也包括VOT竞赛,都是针对短期(short-term,100~500帧)的跟踪问题。但在实际应用场合,我们希望正确跟踪时间长一点,如几分钟或十几分钟,这就是长期(long-term)跟踪问题。前面介绍的方法不适合这种应用场合,必须是short-term tracker + detecter配合才能实现正确的长期跟踪,给普通tracker配一个detecter,在发现跟踪出错的时候调用自带detecter重新检测并矫正tracker。
CF方向一篇比较有代表性的long-term方法是Chao Ma的LCT。LCT在DSST一个平移相关滤波Rc和一个尺度相关滤波的基础上,又加入第三个负责检测目标置信度的相关滤波Rt,检测模块Online Detector是TLD中所用的随机蔟分类器(random fern),在代码中改为SVM。第三个置信度滤波类似MOSSE不加padding,而且特征也不加cosine窗,放在平移检测之后。
- 如果最大响应小于第一个阈值(叫运动阈值),说明平移检测不可靠,调用检测模块重新检测。注意,重新检测的结果并不是都采纳的,只有第二次检测的最大响应值比第一次检测大1.5倍时才接纳,否则,依然采用平移检测的结果。
- 如果最大响应大于第二个阈值(叫外观阈值),说明平移检测足够可信,这时候才以固定学习率在线更新第三个相关滤波器和随机蔟分类器。注意,前两个相关滤波的更新与DSST一样,固定学习率在线每帧更新。
LCT加入检测机制,对遮挡和出视野等情况理论上较好,速度27fps,实验只跑了OTB-2013,跟踪精度非常高。另外TLD也可以期待。
跟踪算法需要能反映每一次跟踪结果的可靠程度,这一点非常重要,不然就可能造成跟丢了还不知道的情况,也就是跟踪置信度 。LMCF提出了多峰检测和高置信度更新。
2.1.6 Opencv目标追踪算法简介
OpenCV 提供了多种用于目标追踪(Object Tracking)的算法,以下是简单总结:
| 算法 | 算法类别 | 精度 | 速度 | 适用场景 |
|---|---|---|---|---|
| BOOSTING | 基于目标模型建模的方法 | 低 | 慢 | 早期算法,适合简单场景 |
| MIL | 基于目标模型建模的方法 | 中 | 中 | 可以处理跟踪过程中的部分遮挡、旋转或尺度变化,复杂背景下表现不佳,计算资源消耗较高 |
| KCF | 基于核相关滤波的跟踪算法 | 中 | 快 | 速度快,性能良好,适合实时应用。处理目标快速变化或大范围移动时效果不佳 |
| TLD | 结合基于模型和搜索方法 | 高 | 慢 | 能够检测和重新识别目标,即使目标短暂消失或遮挡后也能重新捕捉。缺点是处理复杂场景时,容易产生误检 |
| MEDIANFLOW | 基于搜索的方法(点轨迹和运动估计) | 高 | 慢 | 在目标缓慢移动和变化较少的情况下表现优异 |
| MOSSE | 基于相关滤波的跟踪算法(简化版本) | 低 | 非常快 | 极快的追踪速度,适用于实时应用和计算资源有限的场景。精度低,对光照变化和目标变形的鲁棒性较差。 |
| CSRT | 增强的核相关滤波的算法 | 高 | 较慢 | 比 KCF,CSRT 更加准确,能够处理尺度变化、部分遮挡、光照变化等复杂场景 |
| GOTURN | 基于深度学习的跟踪算法 | 中 | 中 | 深度学习方法,适合少量变化的场景。对于旋转、遮挡效果不佳 |
| DaSiamRPN | 基于孪生网络的目标跟踪 | 高 | 中 | 可以处理复杂、尺度和外观变化的场景 ,但是计算资源消耗大,对硬件要求较高 |
在OpenCV中,cv2.Tracker类是一个用于目标跟踪的高级接口。它提供了一种简便的方式来实现视频中对象的跟踪。使用时,你需要创建并初始化目标追踪器,定义目标的初始位置。随后,逐帧读取视频帧,并在每一帧中更新目标位置(update方法)。
2.2 示例一:车辆追踪
python
# 在jupyter中直接显示视频
from IPython.display import HTML
HTML("""
<video width=1024 controls>
<source src="race_car_preview.mp4" type="video/mp4">
</video>
""")
2.2.1 定义辅助函数
python
import cv2
import sys
import os
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
import urllib
video_input_file_name = "race_car.mp4"
# 标注矩形
def drawRectangle(frame, bbox):
p1 = (int(bbox[0]), int(bbox[1]))
p2 = (int(bbox[0] + bbox[2]), int(bbox[1] + bbox[3]))
# 以p1/p2为左上右下角点画矩形,颜色为蓝色。线条宽度为2,类型为1
cv2.rectangle(frame, p1, p2, (255,0,0), 2, 1)
# 显示标注图像
def displayRectangle(frame, bbox):
plt.figure(figsize=(20,10))
frameCopy = frame.copy()
drawRectangle(frameCopy, bbox)
frameCopy = cv2.cvtColor(frameCopy, cv2.COLOR_RGB2BGR)
plt.imshow(frameCopy); plt.axis('off')
# 添加注释,字体类型cv2.FONT_HERSHEY_SIMPLEX,字体比例=1,宽度为3
def drawText(frame, txt, location, color = (50,170,50)):
cv2.putText(frame, txt, location, cv2.FONT_HERSHEY_SIMPLEX, 1, color, 3)2.2.2 创建Tracker实例
首先要安装tracker包,版本号要和自己的opencv-python版本一致
python
pip install opencv-contrib-python==4.5.2.54 cv2.Tracker类本身是一个抽象基类,它不能直接实例化。相反,你需要使用特定的跟踪器创建函数来创建一个具体的跟踪器实例。下面创建跟踪器类型的列表tracker_types,可以通过修改索引来选择不同的跟踪器类型,并创建相应的跟踪器对象。
python
tracker_types = ['BOOSTING', 'MIL','KCF', 'CSRT', 'TLD', 'MEDIANFLOW', 'GOTURN','MOSSE']
# Change the index to change the tracker type
tracker_type = tracker_types[2]
if tracker_type == 'BOOSTING':
tracker = cv2.legacy_TrackerBoosting.create()
elif tracker_type == 'MIL':
tracker = cv2.TrackerMIL_create()
elif tracker_type == 'KCF':
tracker = cv2.TrackerKCF_create()
elif tracker_type == 'CSRT':
tracker = cv2.legacy_TrackerCSRT.create()
elif tracker_type == 'TLD':
tracker = cv2.legacy_TrackerTLD.create()
elif tracker_type == 'MEDIANFLOW':
tracker = cv2.legacy_TrackerMedianFlow.create()
elif tracker_type == 'GOTURN':
tracker = cv2.TrackerGOTURN_create()
else:
tracker = cv2.legacy_TrackerMOSSE.create()2.2.3 读取视频,定义初始边界框
python
# 读取视频
video = cv2.VideoCapture(video_input_file_name)
flag, frame = video.read()
# 如果视频没有打开
if not video.isOpened():
print("Could not open video")
sys.exit()
# 获取帧的宽高
else :
width = int(video.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(video.get(cv2.CAP_PROP_FRAME_HEIGHT))
# 定义输出视频的文件名,并创建一个cv2.VideoWriter对象用于写入处理后的帧
video_output_file_name = 'race_car-' + tracker_type + '.mp4'
video_out = cv2.VideoWriter(video_output_file_name,cv2.VideoWriter_fourcc(*'avc1'), 10, (width, height))
# 定义第一帧的边界框,或者使用cv2.selectROI让用户选择
bbox = (1300, 405, 160, 120)
#bbox = cv2.selectROI(frame, False)
#print(bbox)
displayRectangle(frame,bbox)
# 初始化边界框(init方法,返回一个布尔值,表示是否完成初始化)
ok = tracker.init(frame, bbox)
2.2.4 逐帧读取并追踪目标
python
while True:
flag, frame = video.read()
if not flag:
break
# Start timer
timer = cv2.getTickCount()
# Update tracker
ok, bbox = tracker.update(frame)
# 计算帧率 (FPS)
fps = cv2.getTickFrequency() / (cv2.getTickCount() - timer);
# 画出边界框
if ok:
drawRectangle(frame, bbox)
else :
drawText(frame, "Tracking failure detected", (80,140), (0, 0, 255))
# 在帧上绘制跟踪器类型和帧率信息
drawText(frame, tracker_type + " Tracker", (80,60))
drawText(frame, "FPS : " + str(int(fps)), (80,100))
# 将处理后的帧写入输出视频
video_out.write(frame)
video.release()
video_out.release()查看跟着效果
python
# Tracker: KCF
HTML("""
<video width=1024 controls>
<source src="race_car-KCF.mp4" type="video/mp4">
</video>
""")
改进:在实际应用中,可能需要添加异常处理来确保代码的健壮性。
2.3 案例二:体育赛事
python
import cv2
import argparse
parser = argparse.ArgumentParser()
parser.add_argument('-v', '--video', type=str, help='path to input video file')
parser.add_argument('-t', '--tracker', type=str, default='kcf', help='OpenCV object tracker type')
args = vars(ap.parse_args())
# 定义OpenCV中的七种目标追踪算法
OPENCV_OBJECT_TRACKERS = {
'boosting': cv2.legacy_TrackerBoosting.create,
'csrt': cv2.legacy_TrackerCSRT.create,
'kcf': cv2.legacy.TrackerKCF.create,
'mil': cv2.legacy.TrackerMIL.create,
'tld': cv2.legacy_TrackerTLD.create,
'medianflow': cv2.legacy_TrackerMedianFlow.create,
'mosse': cv2.legacy_TrackerMOSSE.create
}
trackers = cv2.legacy.MultiTracker_create()
cap = cv2.VideoCapture(args['video'])
while True:
flag, frame = cap.read()
if frame is None:
break
# 追踪目标
success, boxes = trackers.update(frame)
# 绘制追踪到的矩形区域
for box in boxes:
# box是个浮点型, 画图需要整型
(x, y, w, h) = [int(v) for v in box]
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow('frame', frame)
key = cv2.waitKey(100)
if key == ord('s'):
# 框选ROI区域
roi = cv2.selectROI('frame', frame, showCrosshair=True, fromCenter=False)
# print(roi)
# 创建一个实际的目标追踪器
tracker = OPENCV_OBJECT_TRACKERS[args['tracker']]()
trackers.add(tracker, frame, roi)
elif key == 27:
break
cap.release()
cv2.destroyAllWindows()
python
# 直接在命令行运行:
C:\Users\LS\Desktop\opencv\代码>python 目标追踪.py -v ./videos/soccer_01.mp4 -t csrt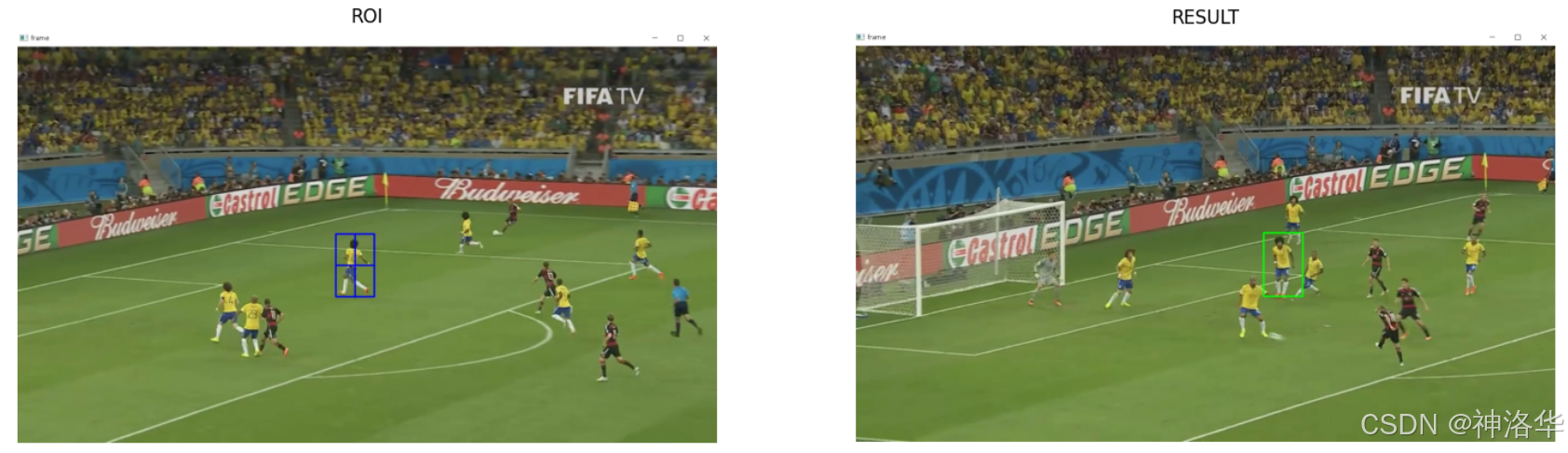
- 代码中我们使用了
selectROI函数。此函数允许用户交互式地选择图像中的感兴趣区域(ROI),其函数签名为:
python
selectROI(windowName, img[, showCrosshair[, fromCenter[, printNotice]]]) -> retvalwindowName:这是显示选择过程的窗口的名称。img:这是用于选择 ROI 的图像。showCrosshair:可选,如果设置为 True,则会显示用于选择矩形的十字准线。fromCenter:可选,如果设置为 True,则选择的原点将匹配初始鼠标位置,一般不用。
当我们按下s键并使用鼠标左键框选之后,这个函数会返回所选区域的坐标,格式为 [x, y, width, height]。此时查看jupyter启动窗口,显示:

即鼠标左键框选ROI区域之后,按下空格键或enter键进行确认,按下c键可以取消。
cv2.legacy是 OpenCV 4.5 及以上版本中的一个命名空间,专门用于包含旧版(legacy)API 的功能。这些旧版功能在新版本中可能已经被修改或替换,但为了向后兼容,OpenCV 仍然提供了这些旧版 API 的访问方式。上述代码中,cv::legacy.MultiTracker需要使用cv::legacy.Tracker类型的追踪器,如果不写这个会报错。