在危险品的处理过程中,人类的直接操作往往伴随着巨大的风险。为此,研究人员一直在寻找有效的解决方案,随着力反馈与机器人技术的不断完善,将SenseGlove力反馈手套与遥操作机器人的结合,为该领域带来了革命性的改变。
触觉力反馈手套

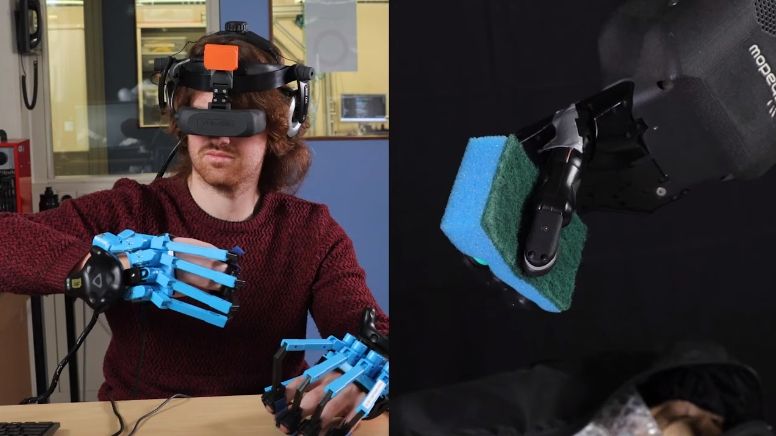
SenseGlove手套结合了三种先进的触觉反馈技术:主动接触反馈、手掌冲击和手指追踪。手套内置的高精度触觉传感器,能够准确地测量用户施加在虚拟物体上的力,并通过磁性摩擦致动器实现力反馈。用户在使用时,可以感受到物体的质地、纹理、重量以及大小和硬度,这使得虚拟现实沉浸式体验更加身临其境。
更加精确的危险品处理过程
在危险品处理方面,遥操作机器人已经得到了广泛的应用。然而,传统的遥操作方式往往缺乏真实感,使得操作员难以准确判断机器人的动作和力度。SenseGlove手套的加入,极大地改善了这一问题。通过手套的触觉反馈,操作员可以清晰地感知到机器人与危险品的接触情况,从而进行更为精确和安全的操作。

在清理有毒有害废物时,传统方法如热室和手套箱系统严重依赖手动操作技术,不仅效率低下,而且风险极高。通过借助SenseGlove手套,操作员可以远程操控机器人进行清理工作,无需直接接触危险品。同时,手套的触觉反馈还能让操作员感受到机器人的实际压力,确保操作的安全性和准确性。
Senseglove在机器人遥操作中的优势

SenseGlove力反馈手套与多种机器人开发软件平台兼容可支持定向开发,且手套具备高度的可调节性和灵活性,适用于各种手部尺寸和形状。这使得操作员可以根据自身情况进行调整,以获得最佳的触觉体验。Senseglove力反馈手套的无线连接技术不仅能够让操作员轻松控制距离自己几公里之外的机器人,还确保了数据传输的稳定性和低延迟,让操作更加流畅自如。
总结
SenseGlove力反馈手套与遥操作机器人的结合为危险品处理领域带来了前所未有的安全性和精确性。这一创新技术的应用不仅降低了操作员的风险,还提高了工作效率和准确性。随着技术的不断发展,我们有理由相信,这种结合将在未来发挥更加重要的作用,为人类的安全和福祉贡献更大的力量。