🎁个人主页:我们的五年****
🔍系列专栏:Linux课程学习****
🌷追光的人,终会万丈光芒
🎉欢迎大家点赞👍评论📝收藏⭐文章


Linux学习笔记:
https://blog.csdn.net/djdjiejsn/category_12669243.html
前言:
C++中已经封装了线程,在这里我们自己对线程进行封装,能更好的理解C++中的线程封装。我们自己封装的线程肯定比不了C++线程库中的封装,但是也能锻炼我们。
目录
[2.1.首先肯定是线程的tid:pthread_t _tid。](#2.1.首先肯定是线程的tid:pthread_t _tid。)
[2.2.进程的pid:pid_t _pid;。](#2.2.进程的pid:pid_t _pid;。)
下面关于锁的封装看看下面的:
Lockguard的构造函数加锁,析构函数解锁,用起来很方便。
cpp
namespace MutexModule
{
class Mutex
{
private:
Mutex(const Mutex &) = delete;
const Mutex &operator=(const Mutex &) = delete;
public:
Mutex()
{
int n = ::pthread_mutex_init(&_mutex, nullptr);
(void)n;
}
void Lock()
{
int n = ::pthread_mutex_lock(&_mutex);
(void)n;
}
void UnLock()
{
int n = ::pthread_mutex_unlock(&_mutex);
(void)n;
}
pthread_mutex_t *LockPtr()
{
return &_mutex;
}
~Mutex()
{
int n = ::pthread_mutex_destroy(&_mutex);
(void)n;
}
private:
pthread_mutex_t _mutex;
};
class LockGuard
{
public:
LockGuard(Mutex &mtx) : _mtx(mtx)
{
_mtx.Lock();
}
~LockGuard()
{
_mtx.UnLock();
}
private:
Mutex &_mtx;
};
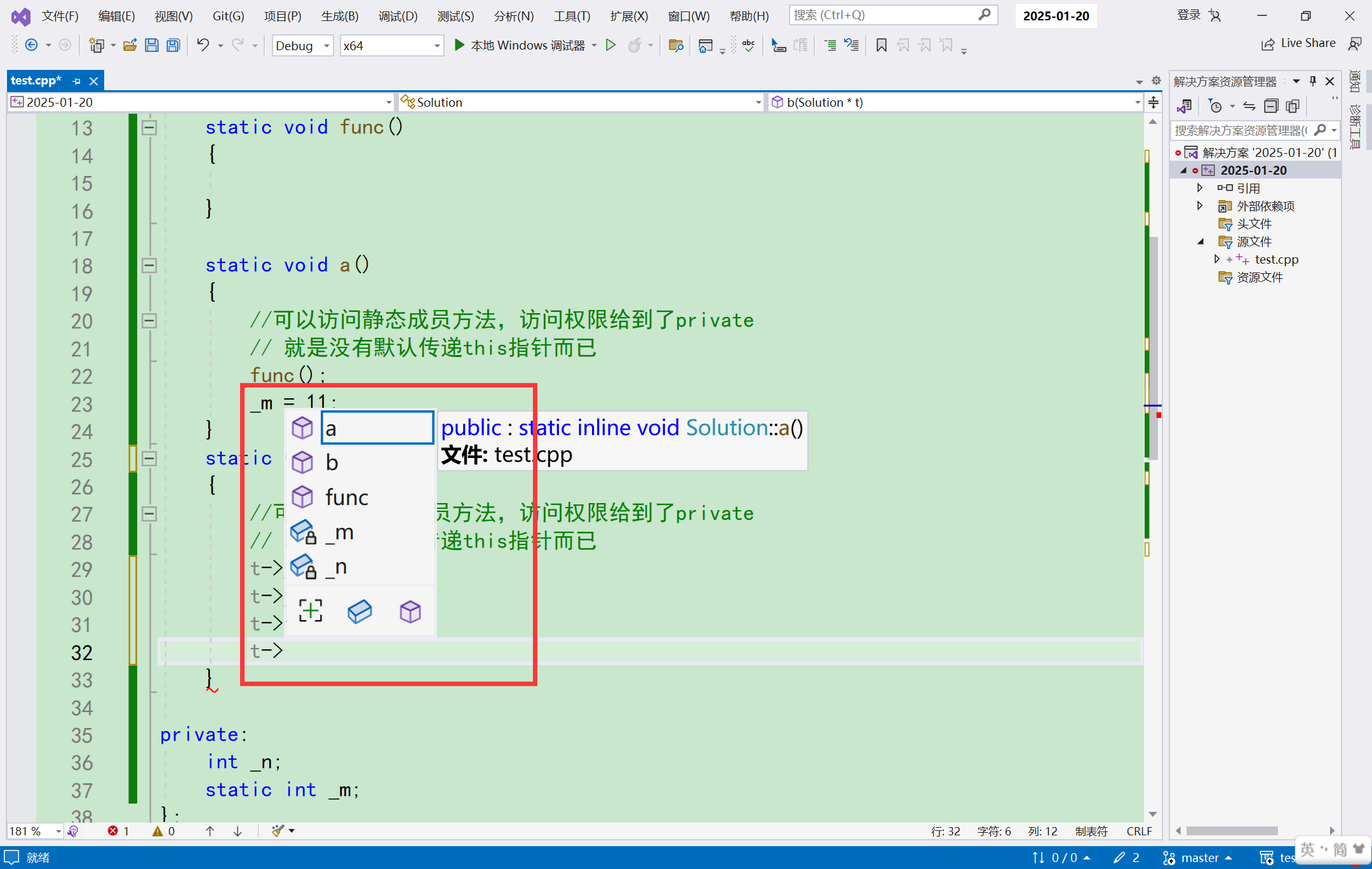
}1.访问内部私有成员变量
1.类中的static函数为什么不能直接访问内部成员变量?
因为默认没有传this指针。所以static函数参数中有this指针的时候,还是可以访问的,此时this(对象)指针不能省略。
2.外部函数不能访问私有成员?
没有默认传递this指针,没有访问权限。声明是类的友元函数的时候,也是可以访问的。
代码:
#include <iostream>
using namespace std;
class Solution {
public:
Solution()
:_n(1111)
{
}
friend static void test(Solution* t);
static void func()
{
}
static void a()
{
//可以访问静态成员方法,访问权限给到了private
// 就是没有默认传递this指针而已
func();
_m = 11;
}
static void b(Solution* t)
{
//可以访问静态成员方法,访问权限给到了private
// 就是没有默认传递this指针而已
t->_n = 555;
t->_m;
t->func();
}
private:
int _n;
static int _m;
};
void test(Solution* t)
{
//能访问是传递了Solution对象,是Solution类的友元
//friend static void test(Solution*& t);
t->_n = 222;
}
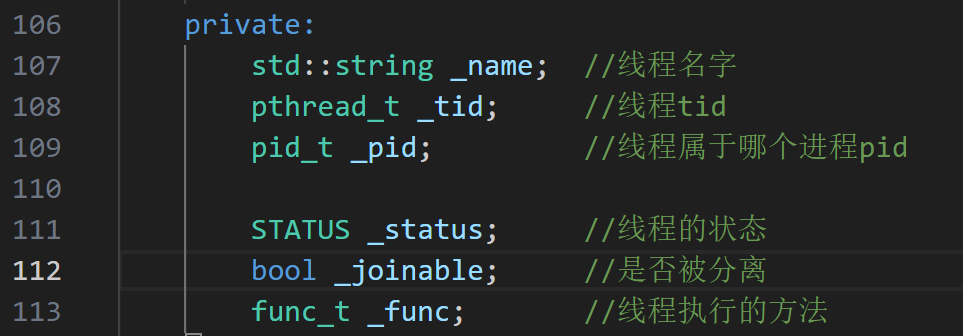
2.Thread成员变量:
2.1.首先肯定是线程的tid:pthread_t _tid。
2.2.进程的pid:pid_t _pid;。
pthread_t _tid;
pid_t _pid;
2.3.线程的状态:
enum class STATUS
{
RUNNING=1,
STOP,
NEW //新的线程的状态
};
STATUS _status;
表示线程的状态,NEW表示新的线程,还没有进行Start操作时的状态信息。
2.4.是否被分离:
线程默认是没有被分离的,而且只有分离和没有被分离两种情况,bool类型。
bool _joinable; //是否被分离
join命名就是,当joinable为true的时候,主线程要进行join,为false的时候,就不要进行join。
void EnableDetach()
{
//状态变为false,新的线程默认为true
_joinable=false;
}
void Detach()
{
EnableDetach();
//线程分离
pthread_detach(_tid);
}2.5.线程名字
为了区分不同的线程可以给线程取个名字。
std::string _name;
名字可以取"thread-num"表示是第几个线程。
2.6.执行的方法:
这里定义的是void(std::string name),返回值为void,参数是string的函数。
using func_t=std::function(void(std::string name));
3.内部成员方法:
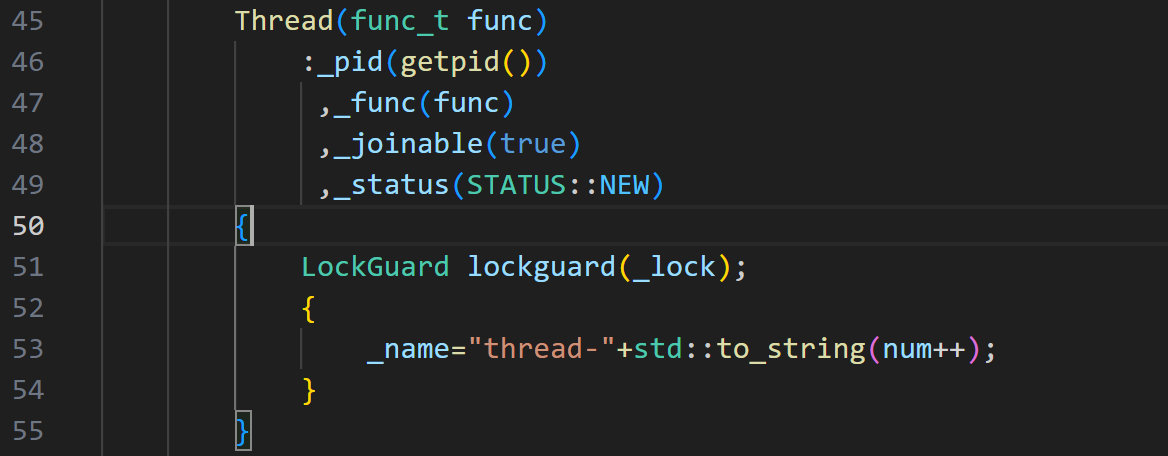
3.1构造函数:
_name:
线程名字以"thread-num"来命名,表示第几个线程。所以定义一个static int num进行记录有多少个线程。但是这是临界资源,线程再创建线程,导致方式混乱。
static int num=1;
_joinable:
_joinable默认是没有被分离的,所以是true。
_func:
_func是外部传进来要执行的方法。所以要有func_t 参数。
_status:
为新线程,状态为NEW。
_tid:
在线程创建的时候,传到pthread里面进行确定。
cpp
Thread(func_t func)
:_pid(getpid())
,_func(func)
,_joinable(true)
,_status(STATUS::NEW)
{
LockGuard lockguard(_lock);
{
_name="thread-"+std::to_string(num++);
}
}
3.2Start函数:
先判断是不是没有在RUNNING,如果在RUNNING就返回false。然后创建线程进行执行,状态修改。
cpp
static void* Routine(void* args)
{
Thread* t=static_cast<Thread*>(args);
t->_status=STATUS::RUNNING;
t->_func(t->Name());
return nullptr;
}
bool Start()
{
if(_status!=STATUS::RUNNING)
{
int n=::pthread_create(&_tid,nullptr,Routine,this);
if(n!=0)
{
//线程创建失败
return false;
}
return true;
}
//已经在RUNNING了
return false;
}3.3Stop函数:
cpp
bool Stop()
{
//在运行的时候,才能cancle
if(_status==STATUS::RUNNING)
{
_status=STATUS::STOP;
int n=::pthread_cancel(_tid);
if(n!=0)
{
return true;
}
}
return true;
}3.4Join函数,EnableJoin函数:
cpp
void EnableDetach()
{
//状态变为false
_joinable = false;
}
bool Join()
{
//没有被分离才能join
if (_joinable)
{
int n = ::pthread_join(_tid, nullptr);
if (n != 0)
return false;
_status = STATUS::STOP;
return true;
}
return false;
}
void Detach()
{
EnableDetach();
//线程分离
pthread_detach(_tid);
}4.整体代码:
cpp
#pragma once
#include <iostream>
#include <cstdio>
#include <string.h>
#include <cstring>
#include <pthread.h>
#include <functional>
#include <unistd.h>
#include <sys/types.h>
#include "Mutex.hpp"
namespace ThreadModule
{
using namespace MutexModule;
using func_t=std::function<void(std::string name)>;
static int num=1;
enum class STATUS
{
RUNNING=1,
STOP,
NEW //新的线程的状态
};
class Thread
{
private:
//执行方法,routine惯例
static void* Routine(void* args)
{
Thread* t=static_cast<Thread*>(args);
t->_status=STATUS::RUNNING;
t->_func(t->Name());
return nullptr;
}
void EnableDetach()
{
//状态变为false
_joinable=false;
}
public:
Thread(func_t func)
:_pid(getpid())
,_func(func)
,_joinable(true)
,_status(STATUS::NEW)
{
LockGuard lockguard(_lock);
{
_name="thread-"+std::to_string(num++);
}
}
bool Start()
{
if(_status!=STATUS::RUNNING)
{
int n=::pthread_create(&_tid,nullptr,Routine,this);
if(n!=0)
{
//线程创建失败
return false;
}
return true;
}
//已经在RUNNING了
return false;
}
bool Stop()
{
//在运行的时候,才能cancle
if(_status==STATUS::RUNNING)
{
_status=STATUS::STOP;
int n=::pthread_cancel(_tid);
if(n!=0)
{
return false;
}
return true;
}
return true;
}
bool Join()
{
//没有被分离才能join
if(_joinable)
{
int n=::pthread_join(_tid,nullptr);
if(n!=0)
return false;
_status=STATUS::STOP;
return true;
}
return false;
}
void Detach()
{
EnableDetach();
//线程分离
pthread_detach(_tid);
}
std::string Name() {return _name;}
bool JoinAble(){return _joinable;}
~Thread()
{
}
private:
std::string _name; //线程名字
pthread_t _tid; //线程tid
pid_t _pid; //线程属于哪个进程pid
STATUS _status; //线程的状态
bool _joinable; //是否被分离
func_t _func; //线程执行的方法
Mutex _lock; //锁进行保护
};
}|------------|
| Start |
| Stop |
| Join |
| EnableJoin |
| Name |
| JoinAble |
感谢阅读,相信美好的事情即将发生。