1、下载PX4源码
进入Linux系统中后,使用以下命令
git clone https://github.com/PX4/PX4-Autopilot.git 下载完成后,在出现一个PX4-Autopilot目录
2、更新子模块
进入PX4-Autopilot目录中更新子模块
cd PX4-Autopilot
git submodule update --init --recursive
中途可能因为网络原因卡住,直接ctrl+C退出,删除卡住的子目录,重新执行更新命令,反复几次直到成功。
3、修改权限
PX4官方警告:"永远不要使用sudo来修复权限问题,否则会带来更多的权限问题,需要重装系统来解决"
所以给普通用户一点权限来解决编译时使用sudo可能带来的危机
sudo usermod -a -G dialout $USER
4、下载依赖库
运行源码中的脚本来安装依赖
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
运行完往上翻一翻,有没有失败的红色段,失败就重复操作几次,直到全部成功,一般是网络问题导致的
没问题则按照提示重启
5、卸载模式管理器
sudo apt-get remove modemmanager
Ubuntu配备了一系列代理管理,这会严重干扰相关的串口(或USB串口),最明显的表现就是硬件连接到PC机后,无法读出硬件,无法烧录上传固件。
6.编译仿真工具
编译jmavsim
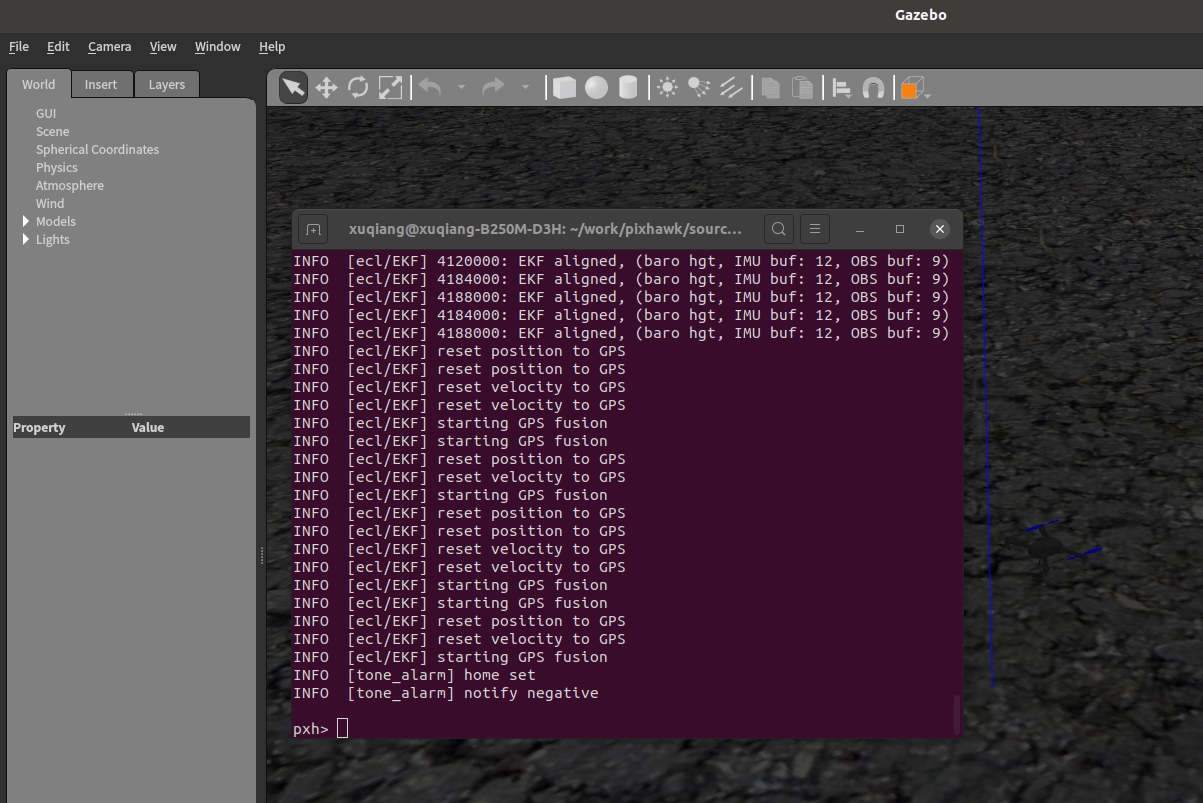
make px4_sitl jmavsim 编译 gazebo,同理
make px4_sitl gazebo 编译成功,自动启动gazebo软件,画面里有一个小飞机
在命令行输入help可查看支持的命令
7、编译源码
在PX4-Autopilot下编译PX4源码
输入make list_config_targets,会出现一系列可编译的px4固件,根据自己需求编译

这里选择v5
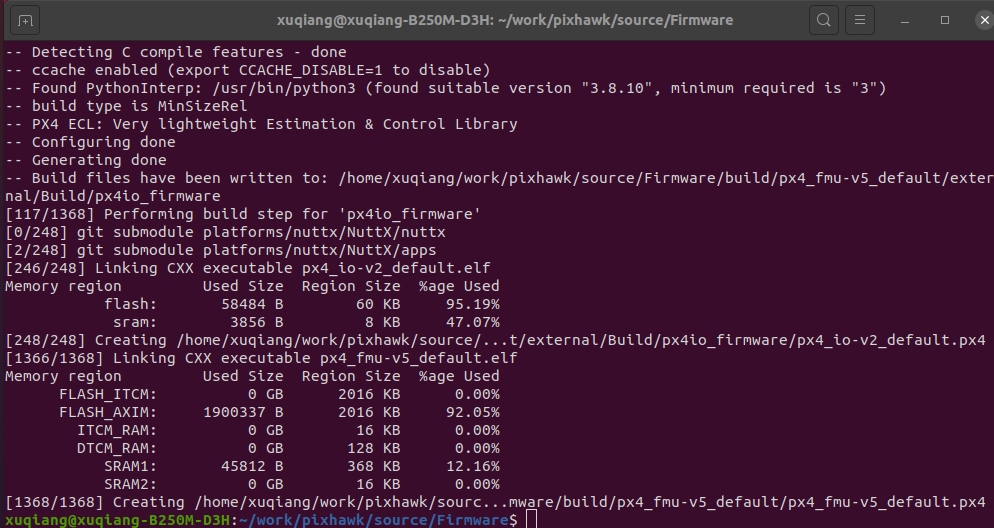
make px4_fmu-v5_default 中途会遇到很多缺少的文件,一般是git不完整,删除文件夹重新更新子模块即可,实在不行去git官网复制一下找不到的文件
编译成功
下载固件
make px4_fmu-v5_default upload
【BUG1】
但是发现有时候ninja会报错:
ninja not work to do 这个时候我们只需在/Firmware 文件夹下执行:make clean
然后重新编译即可...
【BUG2】
waiting for the bootloader......

解决办法是去QGC地面站下载我们的.px4文件到pixhawk中,QGC会帮我们加载bootloader
8.修改源码重新编译验证
现在我们重新编译一下官方给的例子
在/src/example中已经编写好了
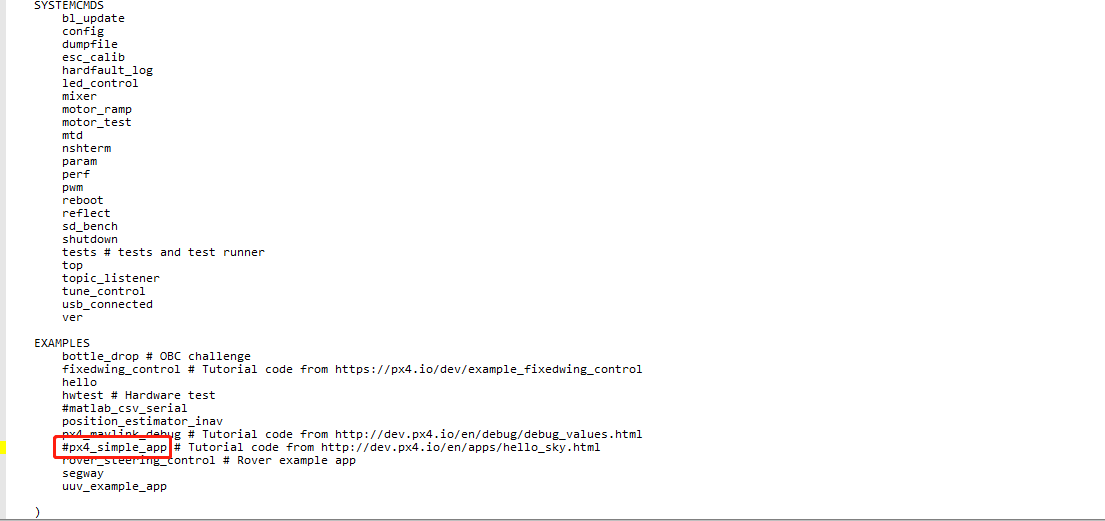
我们只需要打开/PX4-Autopilot/boards/px4/fmu-v5/default.cmake
去掉px4_simple_app前的#,将此模块编译到固件中
打开地面站的MAVLink控制台,键入help,发现px4_simple_app已经被编译好了
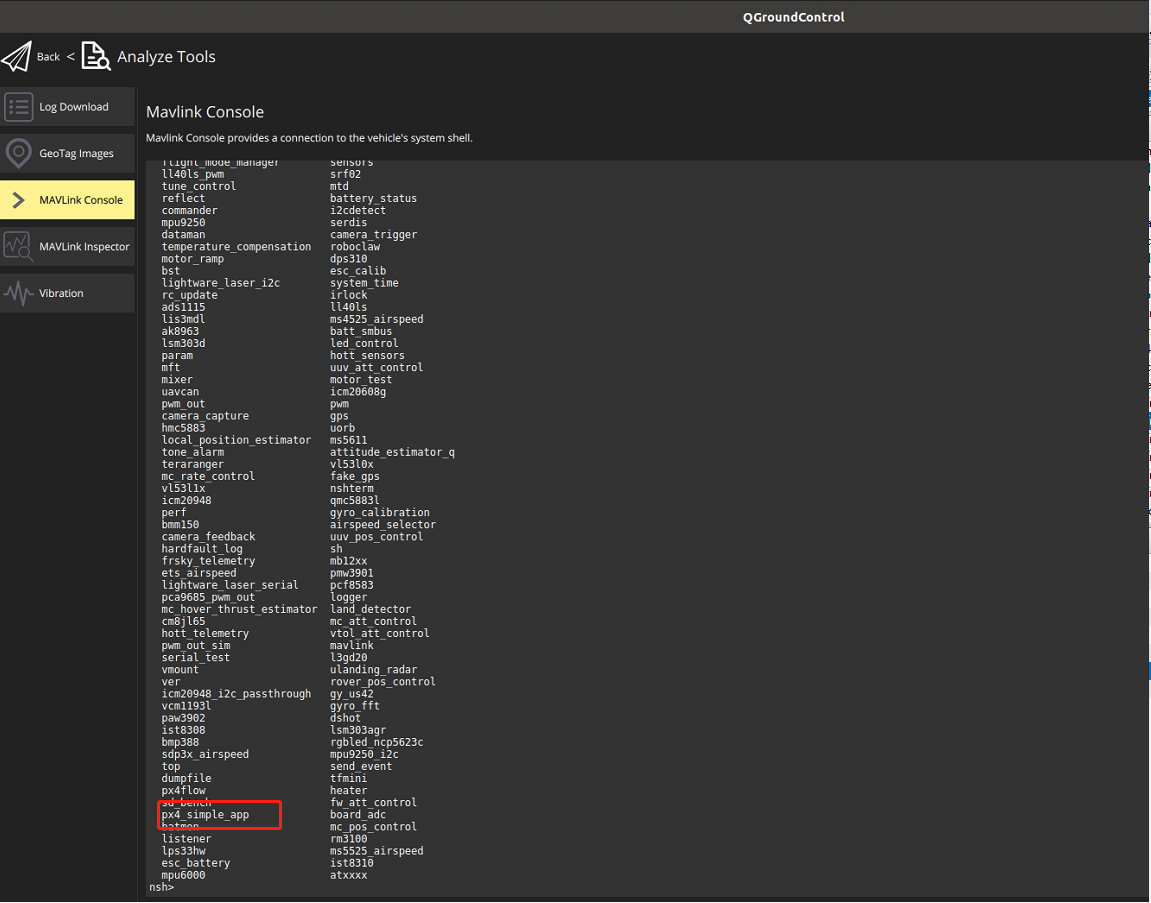
运行一下
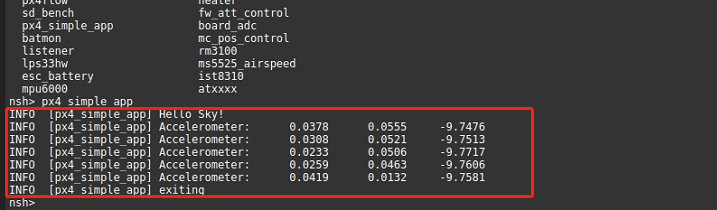
验证成功!