重操旧业,最近实验室又需要测试无人车导航算法,因此又重新启动了松灵机器人scout mini小车 自主导航项目。通过调研,最终选择了前几年比较火的CMU团队的策略(https://www.cmu-exploration.com/)。
CMU exploration 介绍
CMU exploration是一项非常优秀的开源工作,得到了广泛的认可。作者等人维护了一个社区用于解答提问,详细可见链接
参考引用
算法方面我就不做过多的介绍了,详细可见对应的论文和代码地址,本文只介绍在仿真配置流程和过程中遇到的一系列问题。
- ICRA 2022:Autonomous Exploration Development Environment and the Planning Algorithms
- IROS 2022:FAR planner: Fast, attemptable route planner using dynamic visibility update
FAR planner
仿真小车搭建
在之前的文章中我们已经实现了小车仿真环境搭建,并成功实现了LIO-SAM算法仿真。详细内容可以参考链接
https://www.cnblogs.com/binbin2002/p/18499013
导航环境搭建
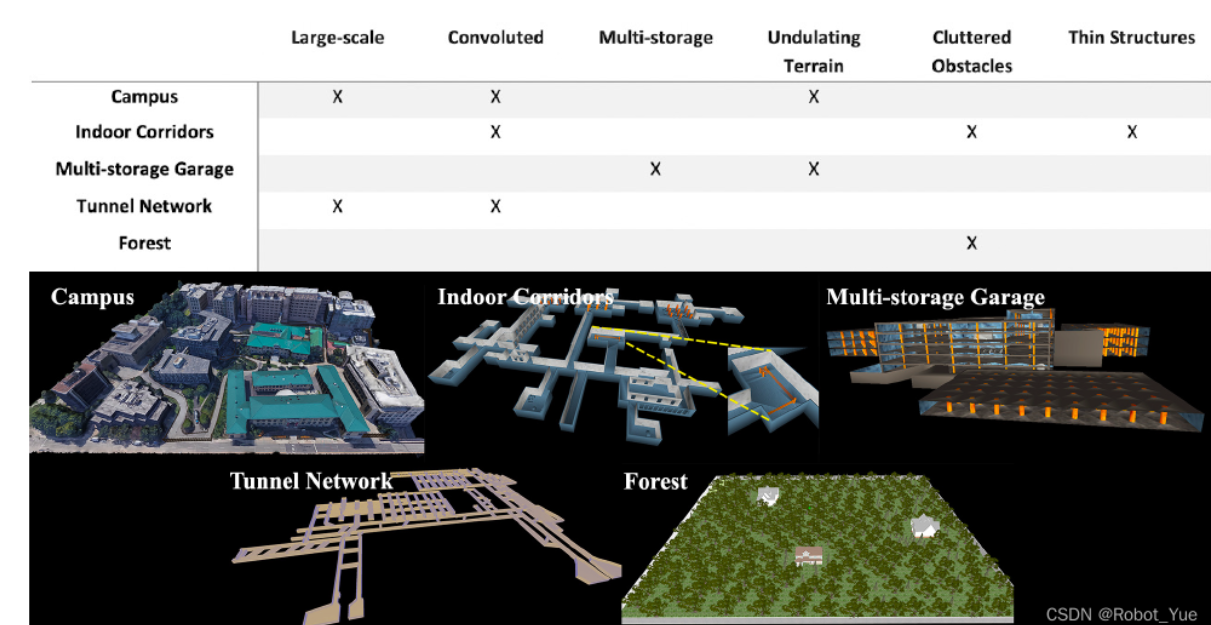
CMU团队开发了一个详细的仿真环境,;里面包含室内环境、校园、停车场、隧道、森林等仿真环境。
bash
# 1.安装依赖
sudo apt update
sudo apt install libusb-dev
# 2. 克隆源码
git clone https://github.com/HongbiaoZ/autonomous_exploration_development_environment.git
# 3.分支检查与编译安装
cd autonomous_exploration_development_environment
git checkout melodic # Ubuntu 20.04 则将 melodic 替换为 noetic
catkin_make
# 4. 通过脚本安装仿真环境
./src/vehicle_simulator/mesh/download_environments.sh
# 5. 启动开发环境
source devel/setup.sh
roslaunch vehicle_simulator system_xxx.launch
# xxx 可替换为对应的 5 种环境之一:campus、forest、garage、indoor、tunnel
bash
# 案例:发送一系列 waypoint,同时发送导航边界和速度,车辆在跟踪 waypoint 的同时在边界内行驶(另开一个终端)
cd autonomous_exploration_development_environment
source devel/setup.sh
roslaunch waypoint_example waypoint_example_garage.launch规划算法搭建
CMU提供了多个导航算法,例如far_planner tare_planner,DSVP等导航策略。可以根据需求自己选择规划方法
- 方法1 :采用tare_planner
bash
# 1. 克隆源码
git clone https://github.com/caochao39/tare_planner.git
# 2. 编译安装
cd tare_planner
catkin_make
# 3. 启动开发环境
cd ~/autonomous_exploration_development_environment
source devel/setup.sh
roslaunch vehicle_simulator system_xxx.launch
# xxx 可替换为对应的 5 种环境之一:campus、forest、garage、indoor、tunnel
# 4. 启动 TARE(另开一个终端)
cd ~/tare_planner
source devel/setup.sh
roslaunch tare_planner explore_xxx.launch- 方法2:采用 far_planner
bash
# 1. 克隆源码
git clone https://github.com/MichaelFYang/far_planner
# 2. 编译安装
cd far_planner
catkin_make
# 3. 启动开发环境
cd ~/autonomous_exploration_development_environment
source devel/setup.sh
roslaunch vehicle_simulator system_xxx.launch
# xxx 可替换为对应的 5 种环境之一:campus、forest、garage、indoor、tunnel
# 4. 启动 FAR Planner(另开一个终端)
cd ~/far_planner
source devel/setup.sh
roslaunch far_planner far_planner.launch仿真启动效果
启动 autonomous_exploration_development_environment(以garage为例)
在system_garage.launch中,修改 gazebo_gui为true,可以启动gazebo环境仿真
启动仿真环境效果如下:
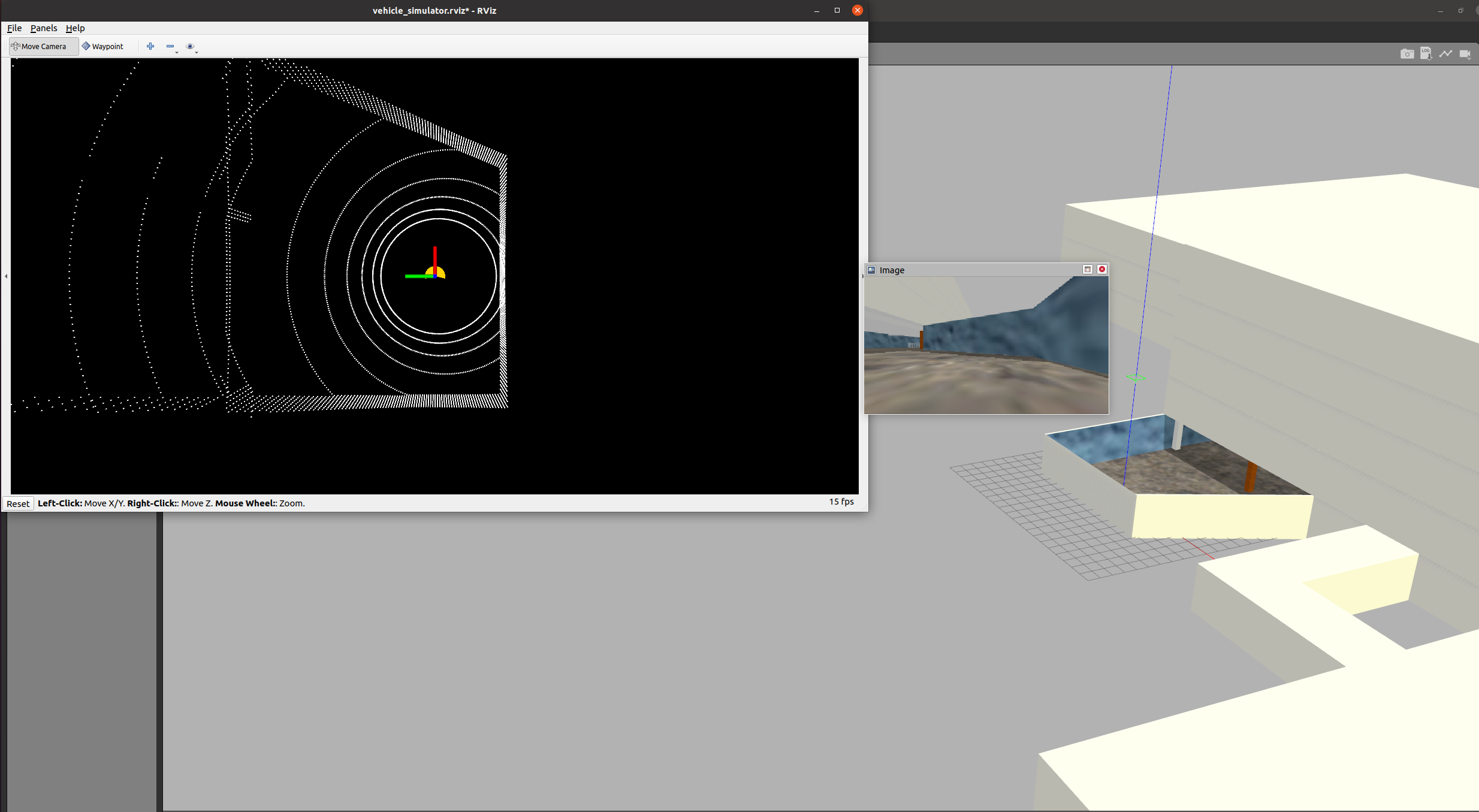
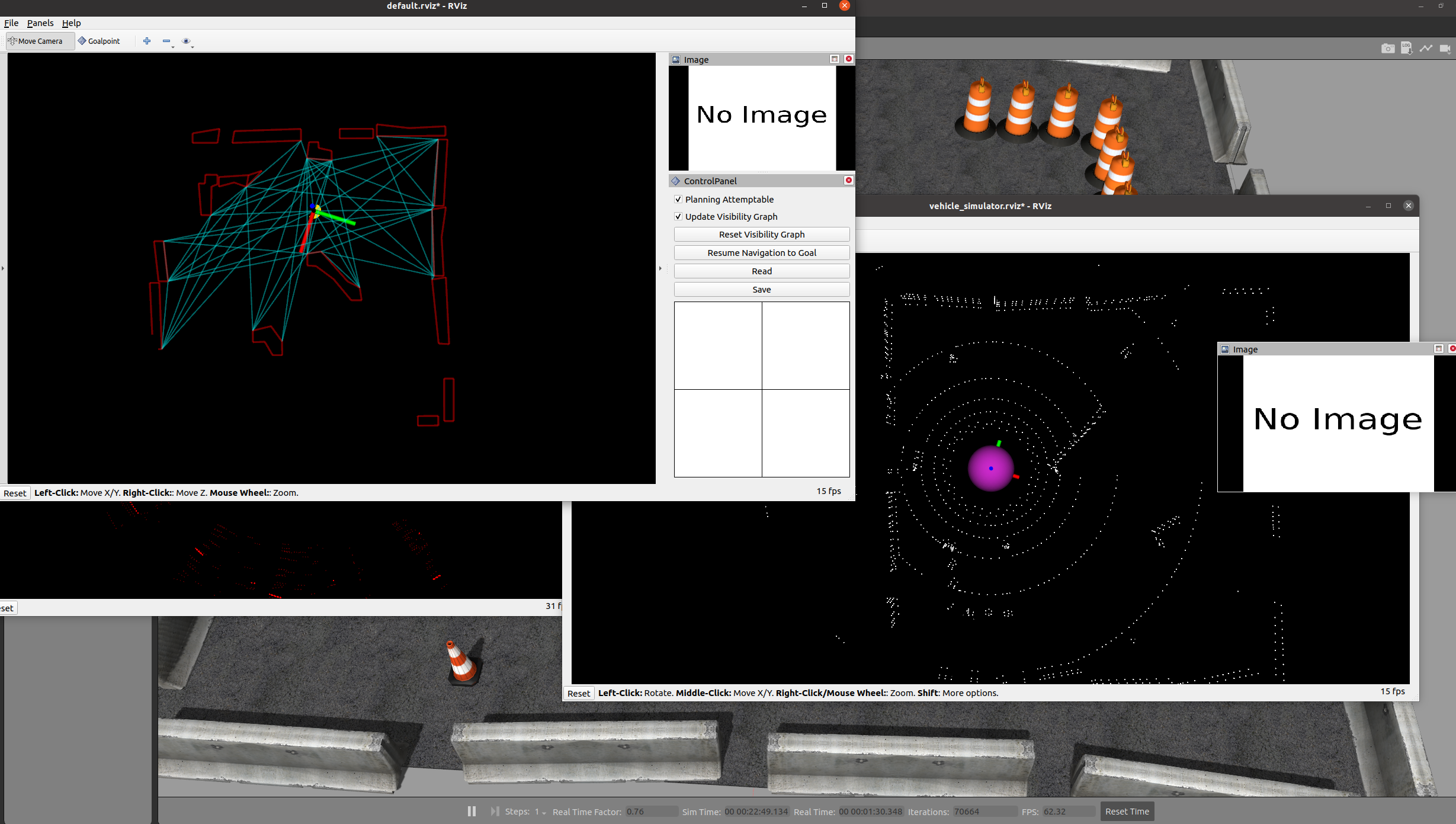
启动 far_planner 规划
启动 far_planner 效果如下:
可以通过rviz选择goalpoint 用于导航
右边的按钮作用如下:
- Reset Visibility Graph:
- 重置可视图. 算法中会提供各个环境中已经探索完的全局V-graph,可以进行重置可视图。同时可以通过勾选 Update Visibility Graph,动态更新可试图。
- 如果想read V-graph 进来然后快速的进行规划和导航操作。此时便可把 Update Visibility Graph 取消勾选(如果环境是动态的则需要勾选以实现更新)
- Resume Navigation to Goal:
- 重新设置导航目标点
- Read & Save:
- 保存已经探索生成的V-Graph / 读取之前保存的V-Graph
- Planning Attemptable:
- 如果取消勾选,则系统默认只会规划已知环境的路径(不会去尝试未知区域),当把 Goalpoint 放在未知区域时才会自动切换为 Attemptable 模式下的规划
CMU exploration与scout mini 小车+LIO-SAM结合
修改loam_interface.launch 接口
算法还提供了system_real_robot.launch能够直接进行实车部署。实车和用他自带的仿真环境在于定位方法不一定。
- gazebo仿真中采用的时gazebo自带的真实位置定位
- 实车则采用SLAM算法进行定位和建图
幸运的是,他们开放了SLAM外部接口。能够兼容目前市场上主流的激光SLAM算法:LOAM、A-LOAM、LeGO-LOAM、LIO-SAM、LIO-mapping、FAST-LIO2、Faster-LIO
- stateEstimationTopic = /lio_sam/mapping/odometry
- registeredScanTopic = /lio_sam/mapping/cloud_registered
- flipStateEstimation = false
- flipRegisteredScan = false
下面我们以之前的LIO-SAM为例进行说明
bash
<!-- loam-interface.launch内容如下 -->
<launch>
<node pkg="loam_interface" type="loamInterface" name="loamInterface" output="screen" required="true">
<param name="stateEstimationTopic" type="string" value="/lio_sam/mapping/odometry" />
<param name="registeredScanTopic" type="string" value="/lio_sam/mapping/cloud_registered" />
<!-- 不同的slam算法发布的odometry以及registered cloud坐标系不一样,需要修改话题名称。而且,不同坐标系的方向不一样,有时候需要进行坐标旋转转换,需要坐标转换则需要修改flipStateEstimation 为true -->
<param name="flipStateEstimation" type="bool" value="false" />
<param name="flipRegisteredScan" type="bool" value="false" />
<param name="sendTF" type="bool" value="true" />
<param name="reverseTF" type="bool" value="false" />
</node>
</launch>loam_interface相关设置链接: https://pan.baidu.com/s/14zw6TNMD4kDjT5vkh2tgmw?pwd=d72x
提取码:d72x
仿真运行
bash
# 1.启动scout mini 仿真
cd scout_gazebo_sim
source devel/setup.bash
roslaunch scout_gazebo_sim scout_mini_playpen.launch
# 2.启动LIO-SAM
source devel/setup.bash
roslaunch lio_sam run.launch
# 3.启动 CMU_explaration real_robot
cd CMU_exploaration
source devel/setup.bash
roslaunch vehicle_simulator system_real_robot.launch
# 4.启动 far_planner
source devel/setup.bash
roslaunch far_planner far_planner.launch -
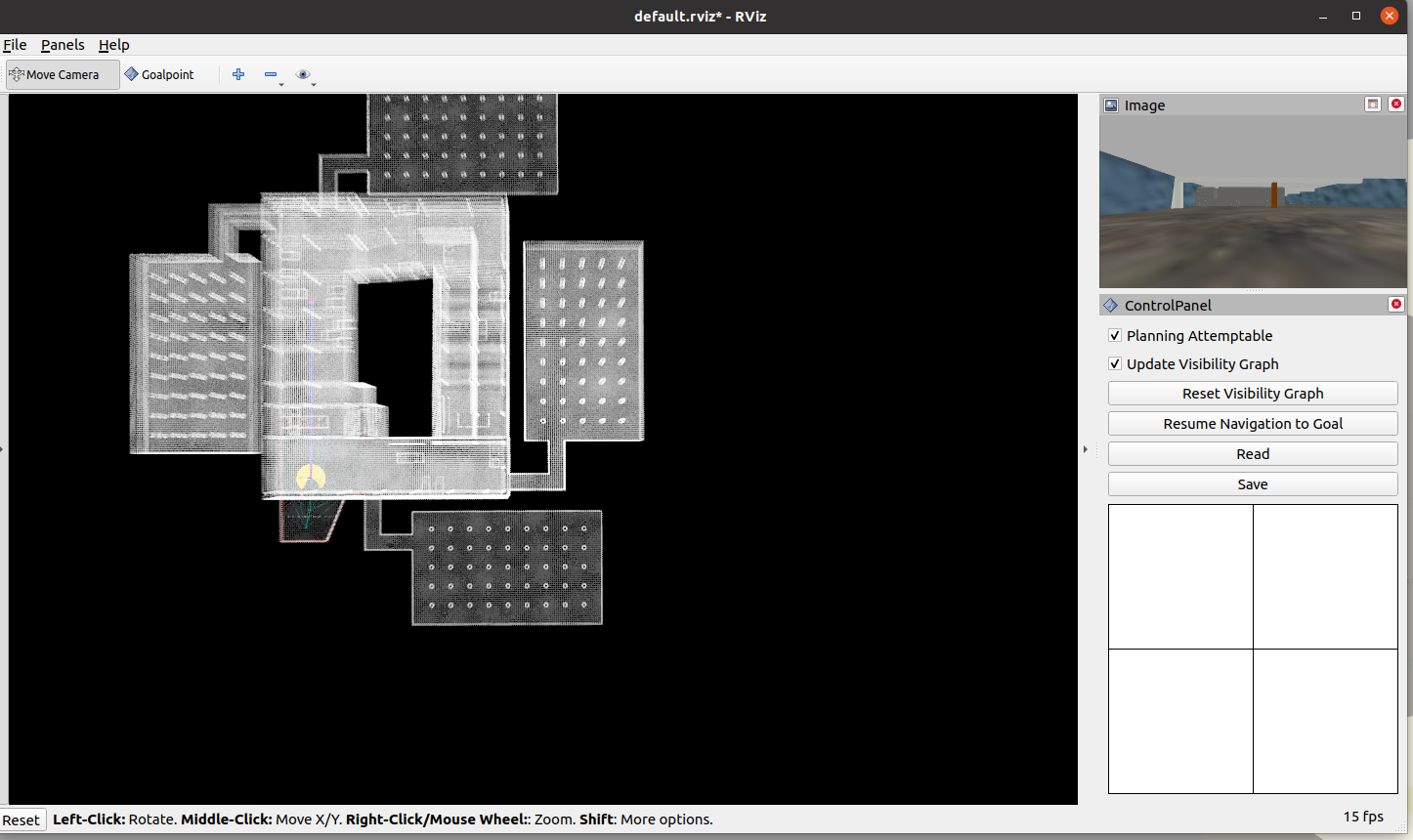
启动scout 仿真

-
启动LIO-SAM
-
启动 system_real_robot.launch
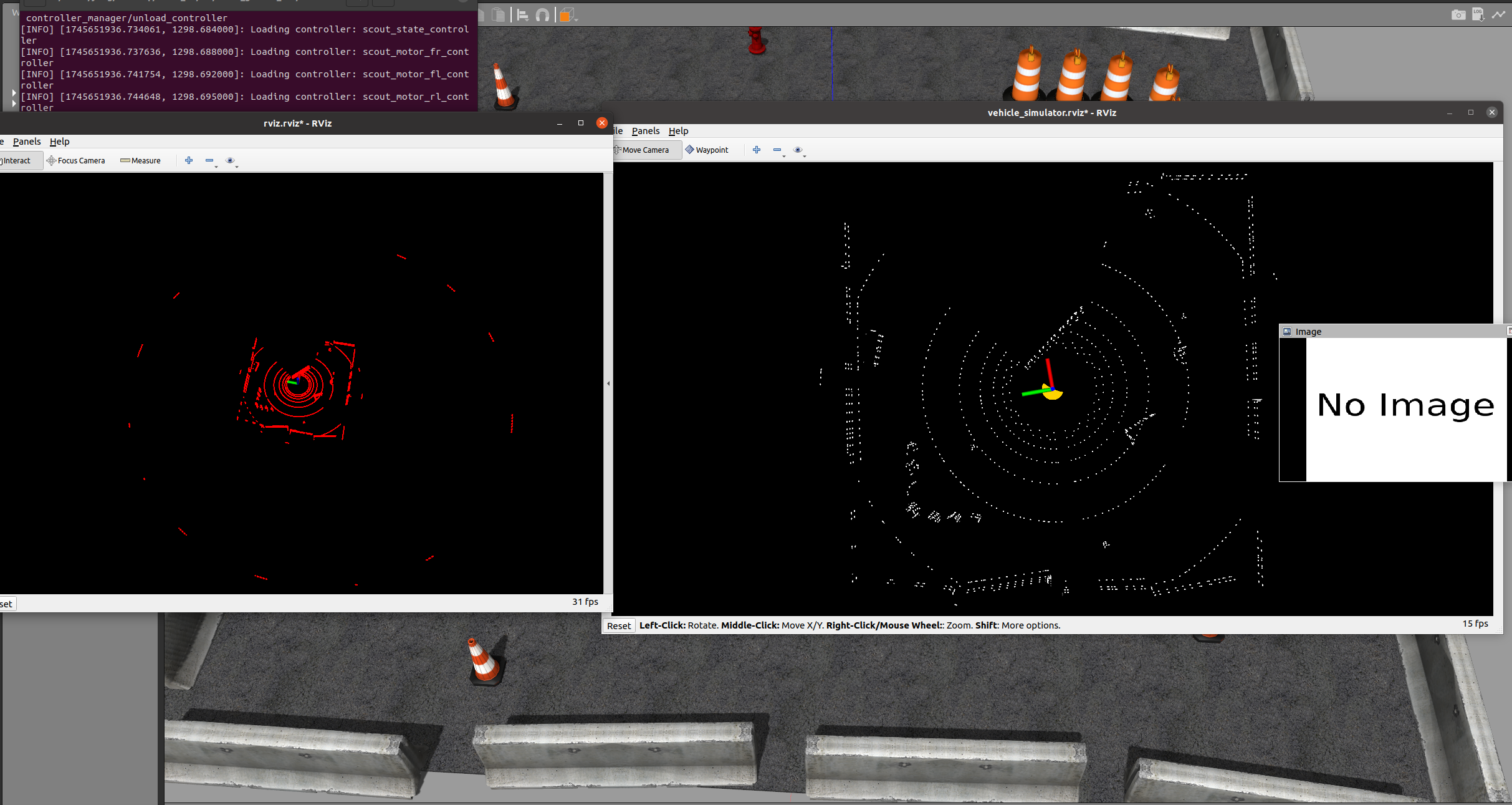
-
启动 far planner
- 导航效果图

遇到问题汇总
1. cmd_vel 话题类型不对
bash
[ERROR] [1745573906.144386448]: Client [/scout_skid_steer_controller] wants topic /cmd_vel to have datatype/md5sum [geometry_msgs/Twist/9f195f881246fdfa2798d1d3eebca84a], but our version has [geometry_msgs/TwistStamped/98d34b0043a2093cf9d9345ab6eef12e]. Dropping connection.在实际操作中发现cmd_vel话题不对,询问chatgpt发现是cmd_vel的类型不对,一个是geometry_msgs/Twist类型,一个是geometry_msgs/TwistStamped 类型。我们需要保证消息类型一致
解决方法: 修改src/autonomous_exploration_development_environment/src/local_planner/src/pathFollower.cpp中的cmd_vel的类型。
c++
//pathFollower.cpp 的226-229行
// ros::Publisher pubSpeed = nh.advertise<geometry_msgs::TwistStamped> ("/cmd_vel", 5);
// geometry_msgs::TwistStamped cmd_vel;
// cmd_vel.header.frame_id = "vehicle";
ros::Publisher pubSpeed = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 5);
geometry_msgs::Twist cmd_vel;
//pathFollower.cpp 的335-343行
// if (pubSkipCount < 0) {
// cmd_vel.header.stamp = ros::Time().fromSec(odomTime);
// if (fabs(vehicleSpeed) <= maxAccel / 100.0) cmd_vel.twist.linear.x = 0;
// else cmd_vel.twist.linear.x = vehicleSpeed;
// cmd_vel.twist.angular.z = vehicleYawRate;
// pubSpeed.publish(cmd_vel);
// pubSkipCount = pubSkipNum;
// }
if (pubSkipCount < 0) {
if (fabs(vehicleSpeed) <= maxAccel / 100.0) cmd_vel.linear.x = 0;
else cmd_vel.linear.x = vehicleSpeed;
cmd_vel.angular.z = vehicleYawRate;
pubSpeed.publish(cmd_vel);
pubSkipCount = pubSkipNum;
}重新编译即可。