1. KITTI 数据集
简介 :由德国卡尔斯鲁厄理工学院与丰田研究院联合创建,是自动驾驶领域最经典的评测基准,涵盖立体视觉、光流、3D检测等任务。包含市区、乡村和高速公路场景的真实数据,标注对象包括车辆、行人等,支持多传感器数据(摄像头、激光雷达、GPS等)。
特点:
-
7481张训练图像和7518张测试图像,含3D点云数据。
-
传感器配置:2个灰度/彩色摄像头、Velodyne 64线激光雷达、IMU/GPS。
-
标注类型:3D边界框、遮挡等级等。
下载地址 :官网

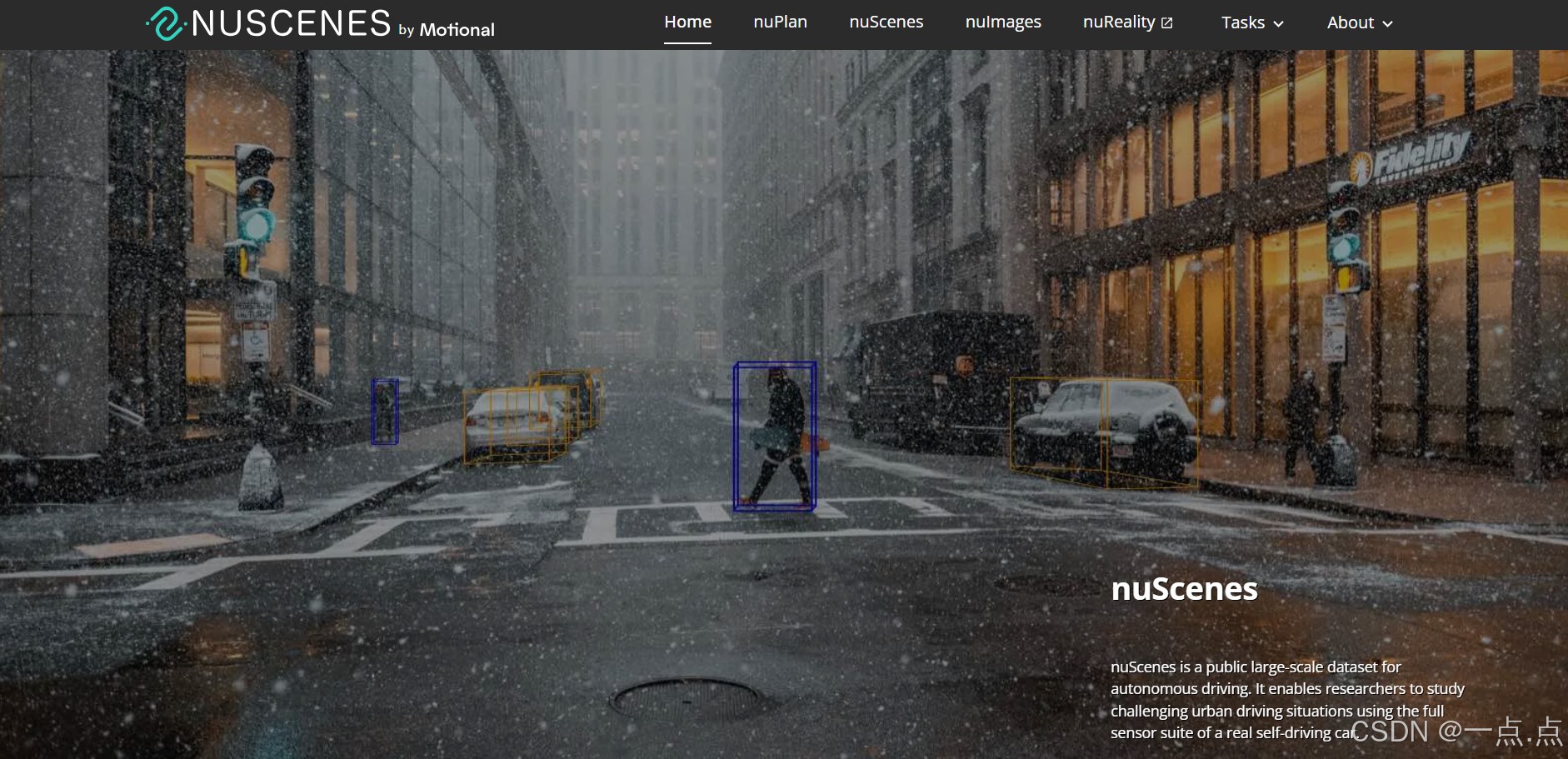
2. nuScenes 数据集
简介 :由Motional团队发布,覆盖波士顿和新加坡的复杂驾驶场景,包含多传感器同步数据,支持3D检测、跟踪和预测任务469。
特点:
-
1000个场景,每个20秒,含140万张图像和39万次激光雷达扫描。
-
传感器:6摄像头、1激光雷达、5毫米波雷达、IMU/GPS。
-
标注:23类物体的1.4M 3D边界框,含可见性、活动状态等属性。
下载地址 :官网
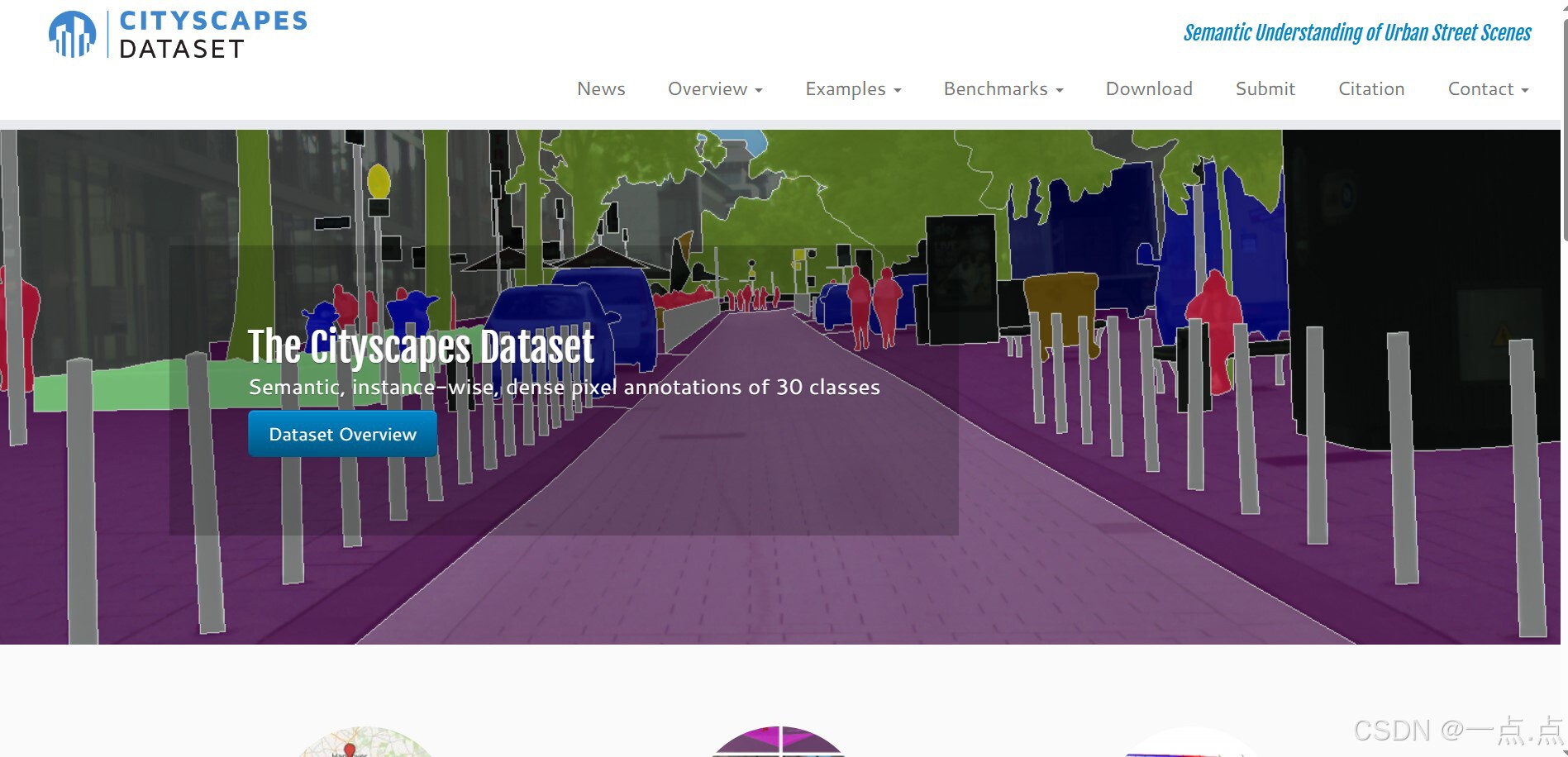
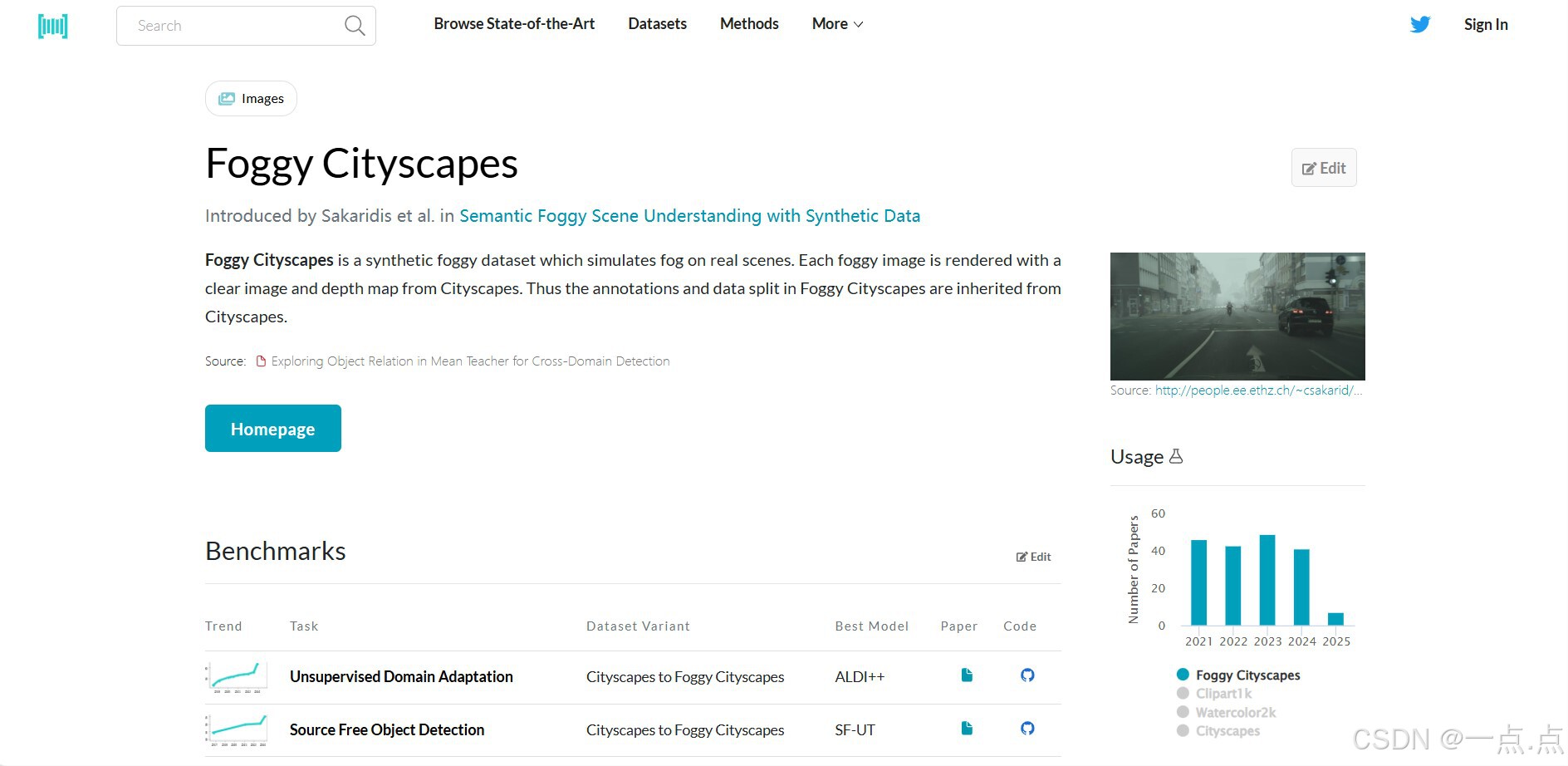
3. Cityscapes & Foggy Cityscapes
简介 :Cityscapes由奔驰推动,专注于城市道路语义分割;Foggy Cityscapes是其扩展,模拟雾天环境,提升算法鲁棒性38。
特点:
-
Cityscapes:5000张精细标注图像,30个类别。
-
Foggy Cityscapes:三种雾浓度(β=0.005/0.01/0.02),保留原标注。
下载地址: -
Cityscapes:官网
-
Foggy Cityscapes:Foggy Cityscapes Dataset | Papers With Code
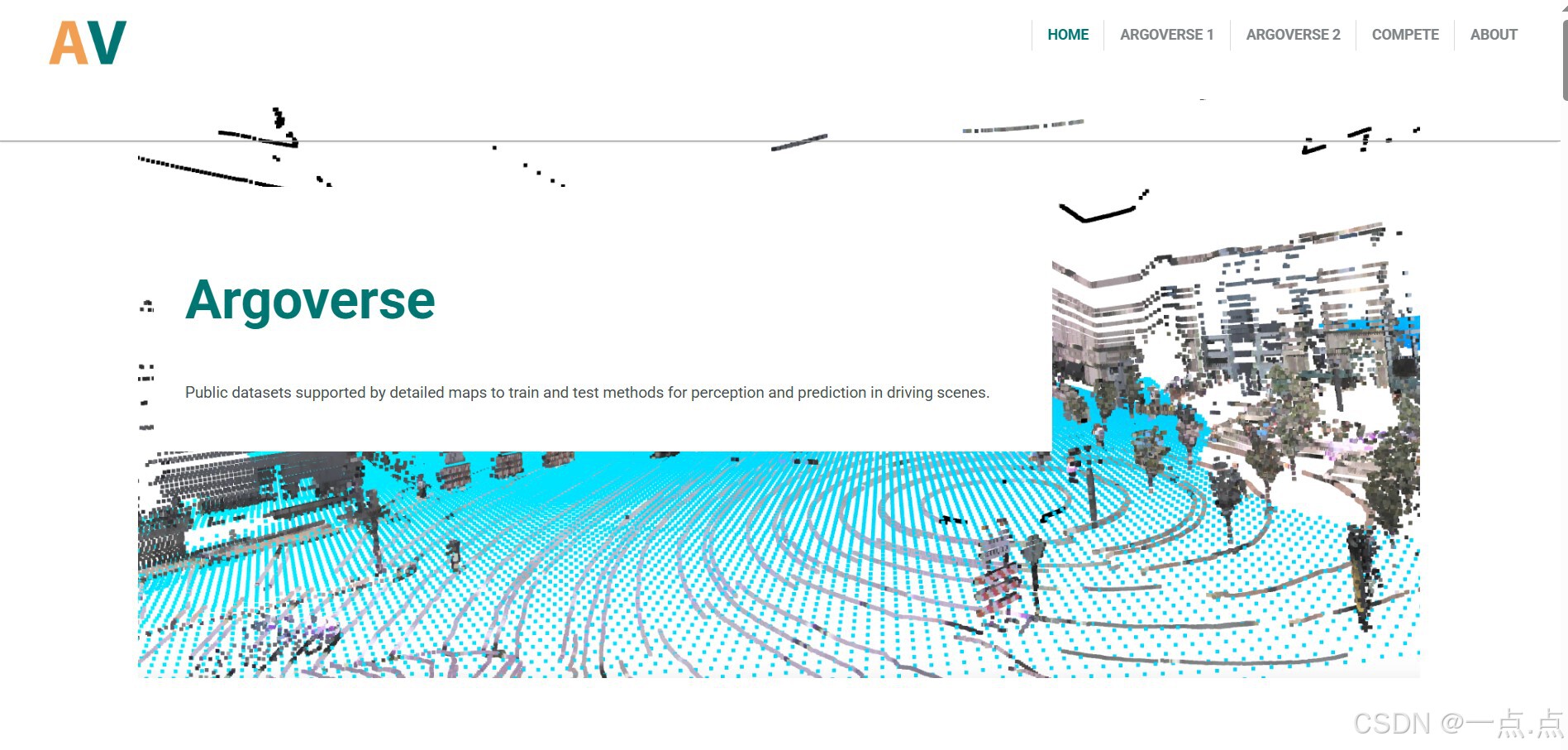
4. Argoverse 数据集
简介 :由Argo AI开发,包含3D跟踪、运动预测和立体深度子集,支持复杂城市环境研究5610。
特点:
-
Argoverse 1:113个场景,15类物体,含高清地图和轨迹标注。
-
Argoverse 2:扩展至30类物体,新增地图变化数据集。
-
传感器:7摄像头、2激光雷达,支持多任务(如运动预测)。
下载地址: -
Argoverse 1:官网
-
Argoverse 2:官网
5. Waymo Open Dataset
简介 :由Waymo LLC发布,规模庞大,支持感知与运动预测任务,覆盖旧金山等多地复杂场景6。
特点:
-
包含1200万3D标注框,支持3D检测、全景分割等。
-
传感器:5摄像头、5激光雷达(含中短距雷达)。
下载地址 :官网
6. BDD100K 数据集
简介 :伯克利大学发布的多样化驾驶数据集,涵盖不同天气、时间场景,支持检测、分割和轨迹预测6。
特点:
- 10万段视频,10万张关键帧图像,标注包括可行驶区域、车道线等。
下载地址 :官网6。
7. ApolloScape 数据集
简介 :百度研究院发布,专注于中国复杂交通场景,含稠密点云和像素级语义标注6。
特点:
-
14.3万张图像,26类物体,分Easy/Moderate/Hard子集。
-
传感器:6摄像头、2高精度激光雷达。
下载地址 :官网
8. Lyft Level 5 数据集
简介 :Lyft发布的L5级自动驾驶数据集,涵盖感知与预测任务,含大量3D标注。
特点:
- 46,000张图像,130万3D标注框,含多线激光雷达和360°摄像头数据。
下载地址 :官网
9. H3D 数据集
简介 :本田研究所发布,聚焦拥挤交通场景的3D检测与跟踪,含高密度点云。
特点:
- 160个场景,27,721帧,110万标注实例。
下载地址 :官网
如果此文章对您有所帮助,那就请点个赞吧,收藏+关注 那就更棒啦,十分感谢!!!