文章目录
📚简介
利用智能手机的 摄像头+IMU 采集数据,并在 VINS-Fusion(视觉惯性SLAM系统)中实现定位与建图。
🚀手机录制数据
🚀跑通数据
🔧启动rviz
在有桌面的ubuntu系统下启动终端:
bash
source /opt/ros/noetic/setup.bash
roslaunch vins vins_rviz.launch🔧启动配置
启动新的终端:
bash
rosrun vins vins_node ~/catkin_ws/src/vins-fusion/config/ours/phone/ours_mono_imu_config.yaml🔧播放rosbag
启动新的终端:
bash
rosbag play ~/Downloads/20250425/output.bag🎯跑通结果
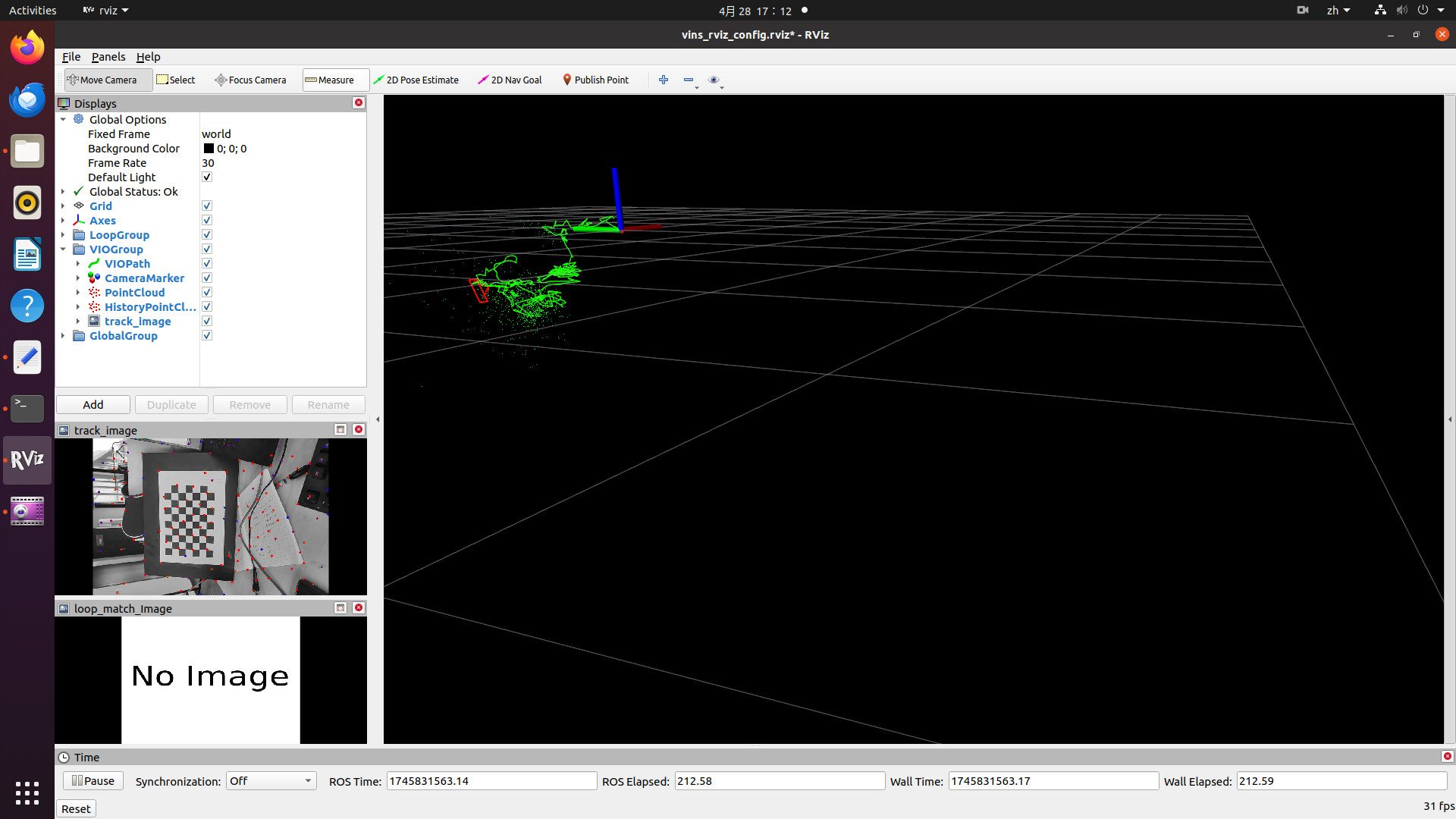
跑通效果:
20250428-phone-calibr