合肥工业大学王正雨老师团队针对绳牵引并联连续体机器人的运动学建模提出一种基于Transformer网络的分段学习方法,该方法较传统建模性能卓越、精度更高。相关研究论文"Transformer-based segmented learning for kinematics modelling of a cable-driven parallel continuum robot" 发表于工程技术领域期刊Proc IMechE Part C: J Mechanical Engineering Science。
NOKOV度量动作捕捉系统为本研究提供了精确的机器人运动轨迹,助力验证基于Transformer网络的分段学习方法的有效性。
引用格式
Liu X, Wang Z, Li Z, Ma L, Wang D, Xu X. Transformer-based segmented learning for kinematics modelling of a cable-driven parallel continuum robot. Proceedings of the Institution of Mechanical Engineers, Part C. 2025;239(8):2942-2952. doi:10.1177/09544062241306683
研究背景
绳牵引并联连续体机器人因其结构柔顺性,在狭窄空间和复杂环境中的操作展现出巨大潜力。然而,其运动学建模复杂,传统的建模方法存在计算复杂度高、模型精度有限等问题。近年来,数据驱动的学习方法逐渐被应用于绳牵引并联连续体机器人的运动学建模中,但现有的学习方法在处理多空间映射时存在不足,导致建模精度受限。为解决这些问题,合肥工业大学王正雨老师团队围绕绳索驱动绳牵引并联连续体机器人的运动学建模展开研究。
本文贡献
-
提出一种基于机器学习的绳牵引并联连续体机器人的动力学建模方法。
-
在此方法中,将分段学习算法应用于具有多个空间映射的系统,以降低学习复杂性并提高预测精度。
-
在此方法中,引入Transformer网络,以增强不同系统映射之间的建模能力,并能有效处理回归任务,实现准确的预测。
研究对象
研究设计了一种平面的绳牵引并联连续体机器人(PCR),该机器人具有三个自由度,包括在平面内的平移和旋转。机器人的末端执行器呈等边三角形,通过耦合单元与连杆连接,连续体机制使用单自由度连续体机制。
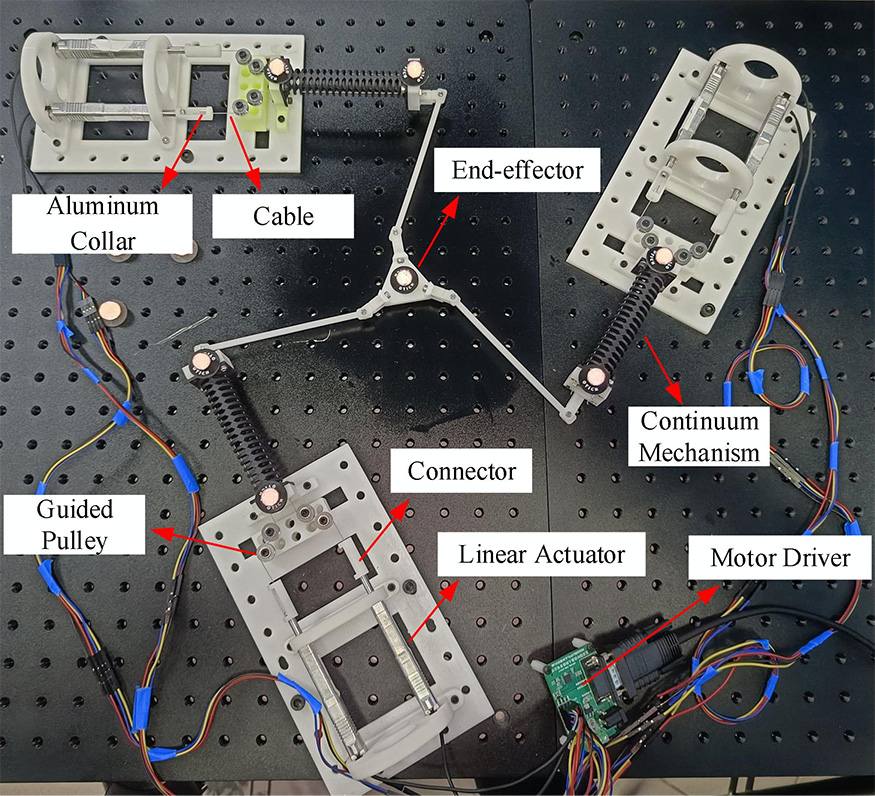 图片:PCR的结构,主要包括末端执行器、连续体机制、绳索和线性执行器
图片:PCR的结构,主要包括末端执行器、连续体机制、绳索和线性执行器
建模方法
分段学习策略:研究通过分段学习,分别建立了从任务空间到配置空间(即从末端执行器位置向量到连续体机制关节预测向量)和从配置空间到执行空间(即从连续体关节预测向量到电机位移预测向量)的映射关系。
Transformer网络架构:使用 Transformer 网络作为基础网络结构单元,通过自注意力机制和前馈神经网络实现长序列建模,提供全局上下文特征提取和并行计算能力。
通过分段学习策略,Transformer网络能够更准确地捕捉任务空间、配置空间和驱动空间之间的映射关系。
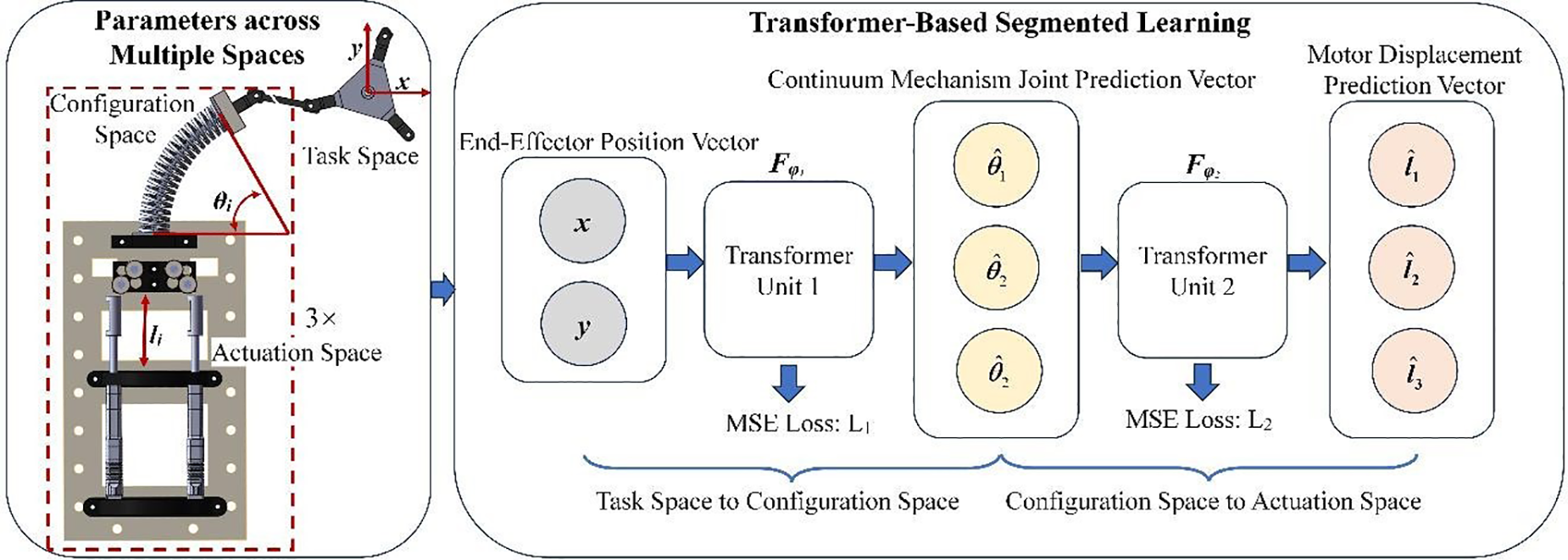 图片:Transformer-based Segmented Learning(TBSL)方法的结构,包括基于Transformer的神经网络单元以及从任务空间到配置空间再到执行空间的分段学习框架
图片:Transformer-based Segmented Learning(TBSL)方法的结构,包括基于Transformer的神经网络单元以及从任务空间到配置空间再到执行空间的分段学习框架
现场试验
实验平台:包括绳牵引并联连续体机器人、电机驱动器、校准杆、NOKOV度量动作捕捉系统等。为实时捕捉机器人末端执行器的位置和连续体机制的弯曲角度,实验现场共搭设4组Pluto 1.3C动作捕捉镜头,以验证建模方法的有效性。
 图片:实验平台,包括绳牵引并联连续体机器人(PCR)、NOKOV运动捕捉镜头、电机驱动器和主机计算机
图片:实验平台,包括绳牵引并联连续体机器人(PCR)、NOKOV运动捕捉镜头、电机驱动器和主机计算机
实验设计:研究设计了圆形和方形轨迹,用于评估本研究和传统建模方法的轨迹跟踪精度。
实验结果:基于Transformer网络的分段学习方法在圆形和方形轨迹下的最大误差、平均绝对误差和均方根误差均显著低于传统建模方法。
绳牵引并联连续体机器人(PCR)现场实验
NOKOV度量动作捕捉系统为实验提供了亚毫米级精度的机器人实际运动轨迹数据,用以分析误差,验证新建模方法的有效性和卓越性。
作者简介
刘旭昌,合肥工业大学机械工程学院硕士研究生。主要研究方向为:柔索驱动连续体机器人、连续体手术机器人
王正雨(通讯作者),合肥工业大学机械工程学院副教授、硕士生导师。主要研究方向:先进机器人技术与智能控制、刚柔软耦合驱动医疗机器人、智能制造机器人装备与系统
李紫千,合肥工业大学机械工程学院硕士研究生。主要研究方向为:机器人技术、人工智能
马乐,合肥工业大学机械工程学院硕士研究生。主要研究方向为:柔索驱动连续体机器人、连续体探测机器人、人工智能
王道明,合肥工业大学机械工程学院教授,博士生导师。主要研究方向:机器人技术及应用、车辆线控制动技术、智能结构与系统
徐新洲,南京邮电大学物联网学院硕士研究生导师。主要研究方向:音频信号智能处理、机器学习与人工智能