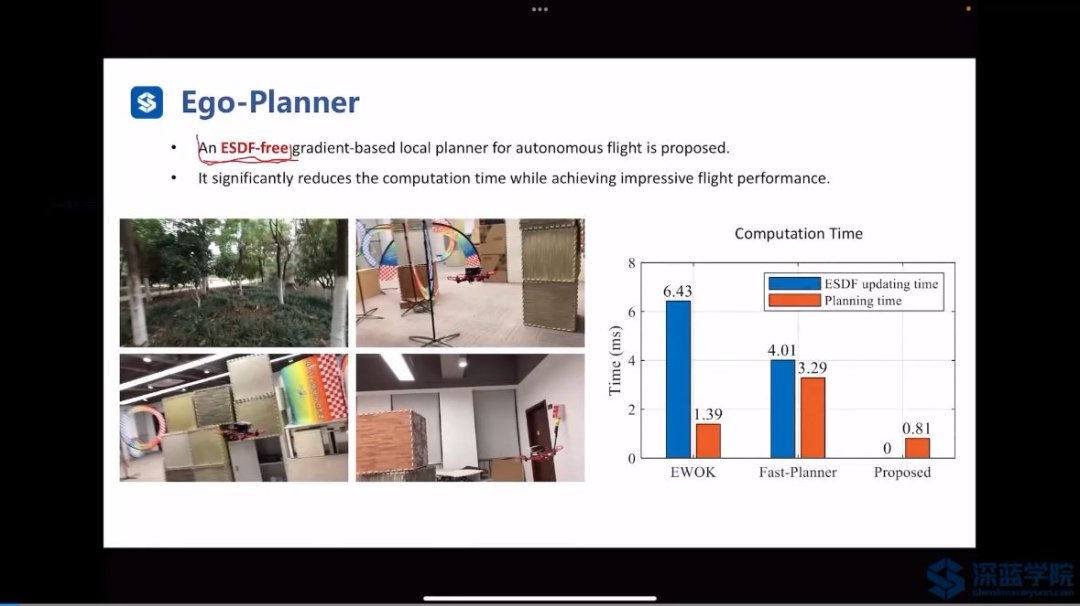
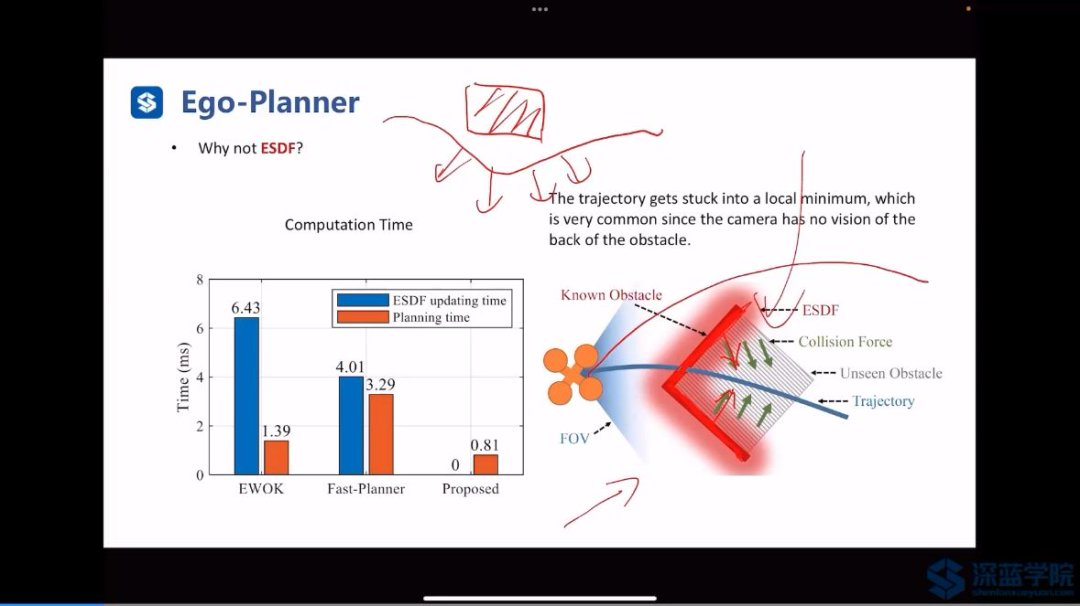
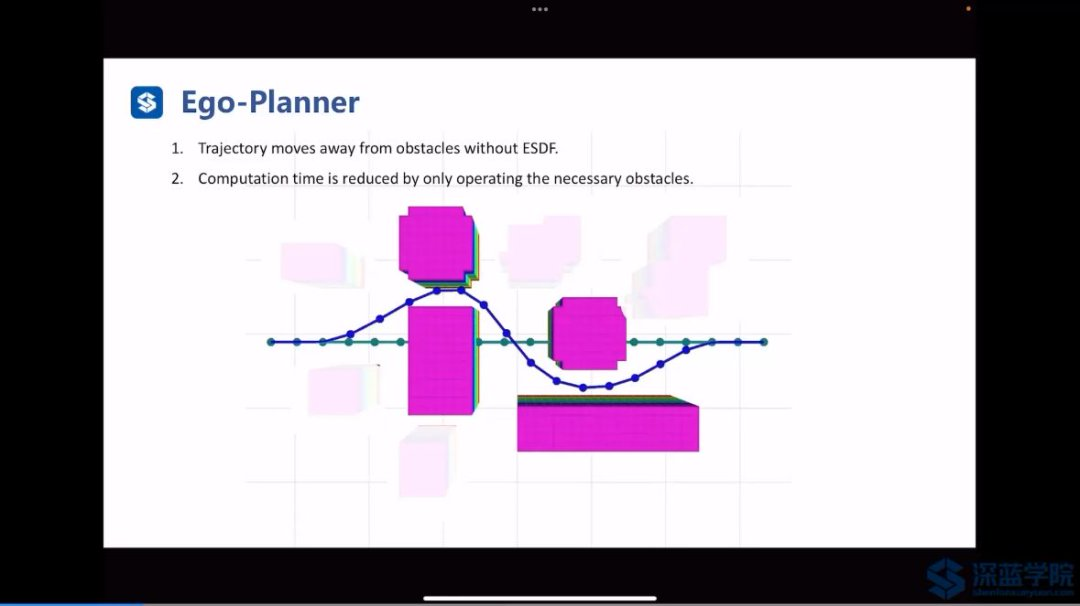
ESDF-free:
 被这种类型的障碍物死死卡住的情况:
被这种类型的障碍物死死卡住的情况:
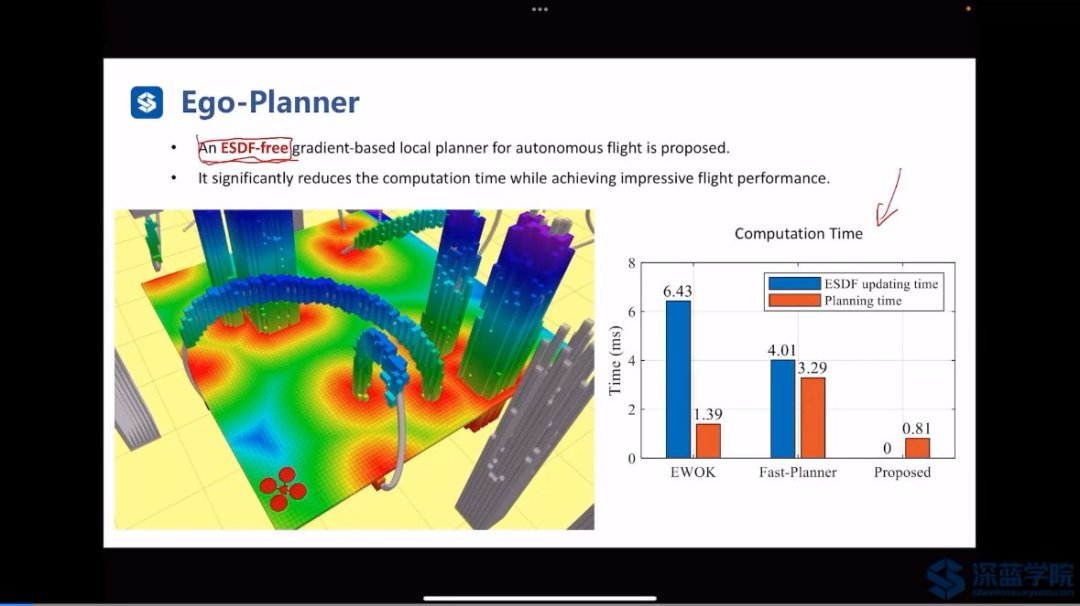
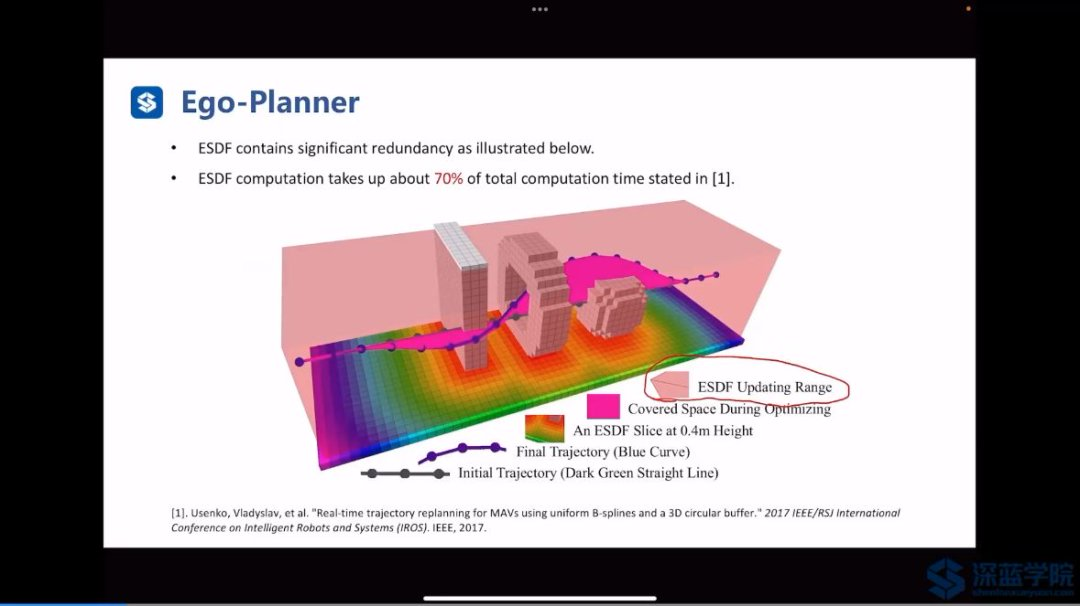
在一定范围内建立ESDF:
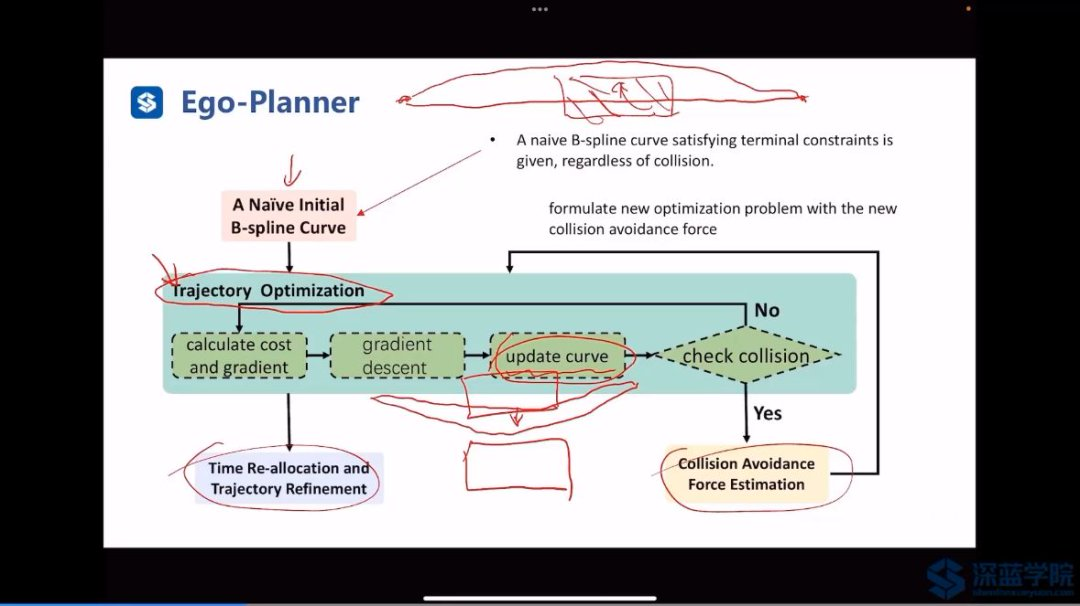
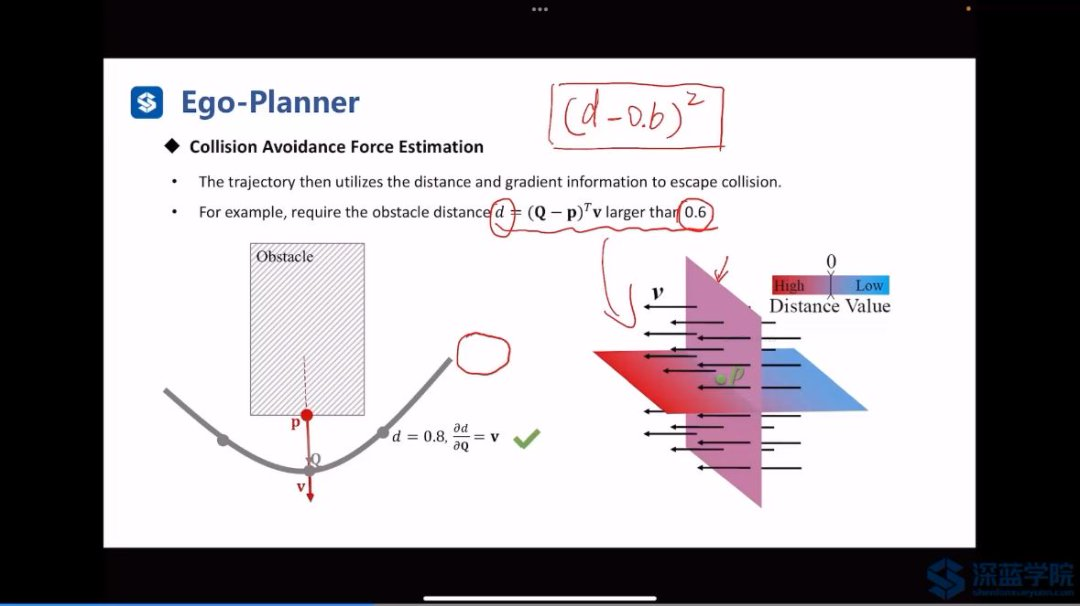
Ego-Planner框架:
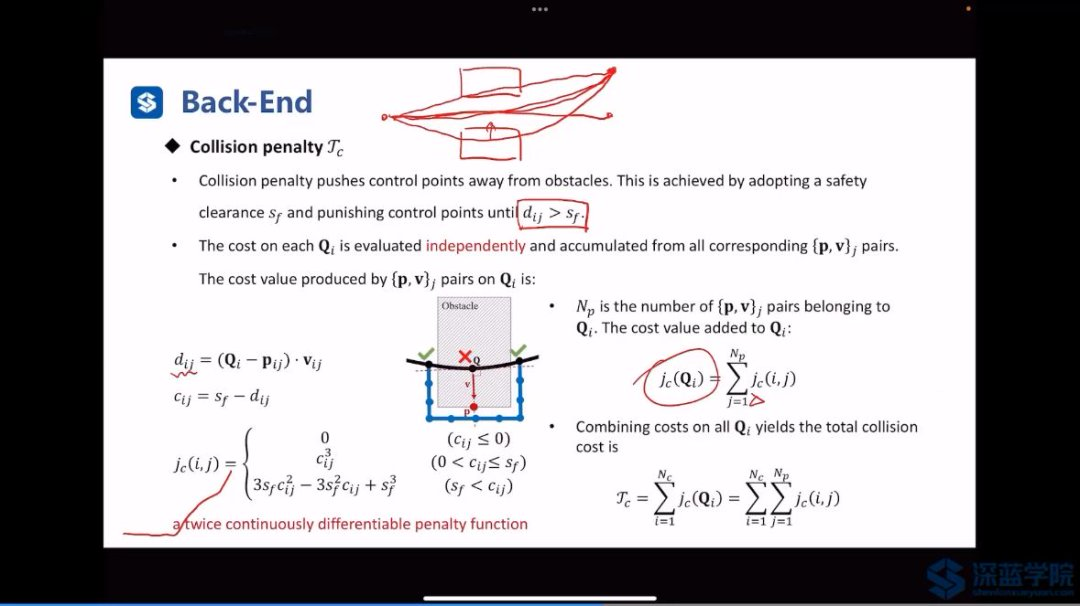
找到{p,v} pair:
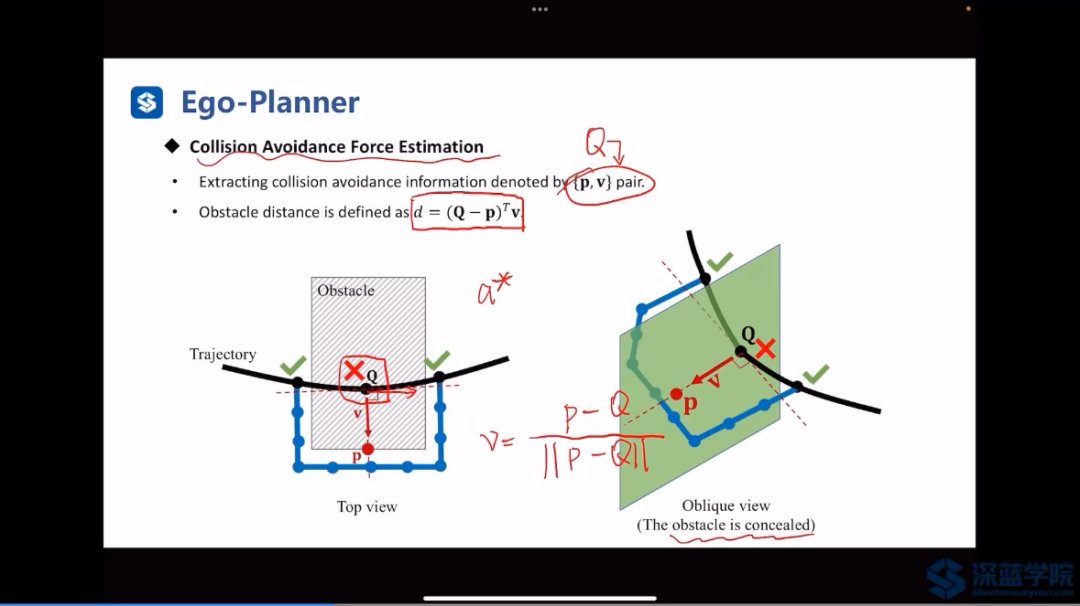
【注意】:首先根据在障碍物内航迹上的点Q,以及与它相邻但不在障碍物内的两个点,假设从左往右进行飞行,左边点为起点,右边点为终点,通过A*算法求出一条不经过障碍物的蓝色范围航迹,然后取Q点此时的速度方向,通过速度方向求到在Q点的法向平面与障碍物的交点为p,其单位方向向量为v,这两个{p,v}就叫对pair,此时这个d就叫做障碍物安全距离。控制好安全距离即可安全避障。
通过设置将障碍物距离设置为优化函数进行求解:
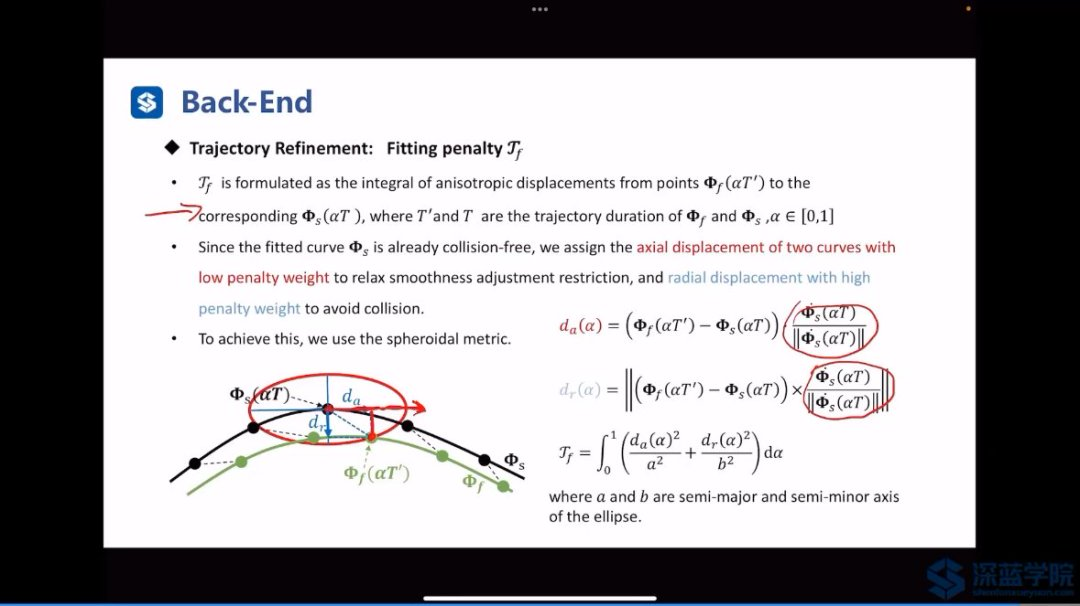
基于梯度的航迹优化:
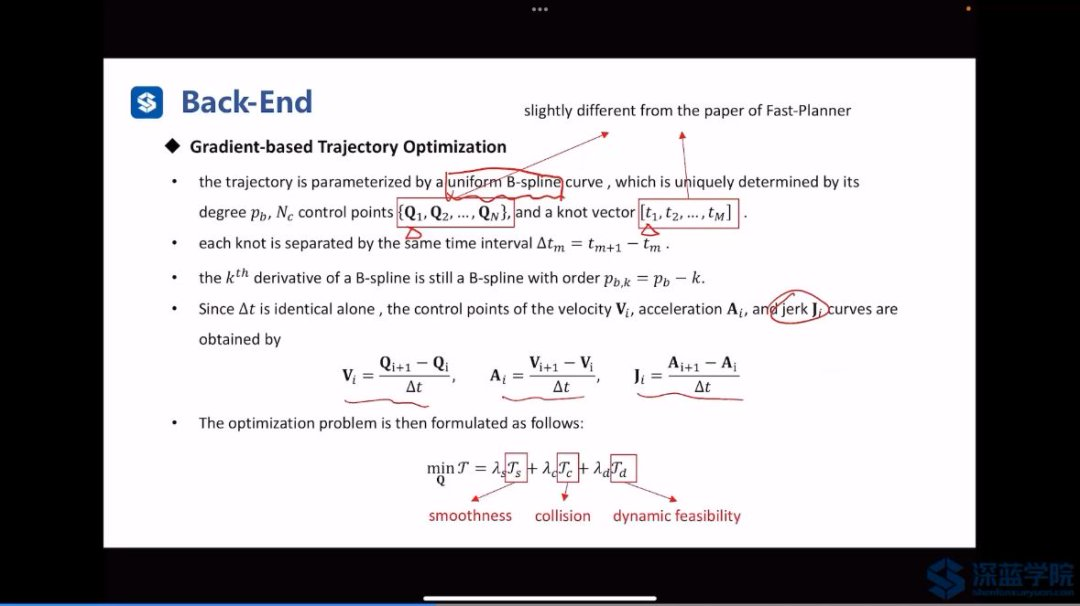
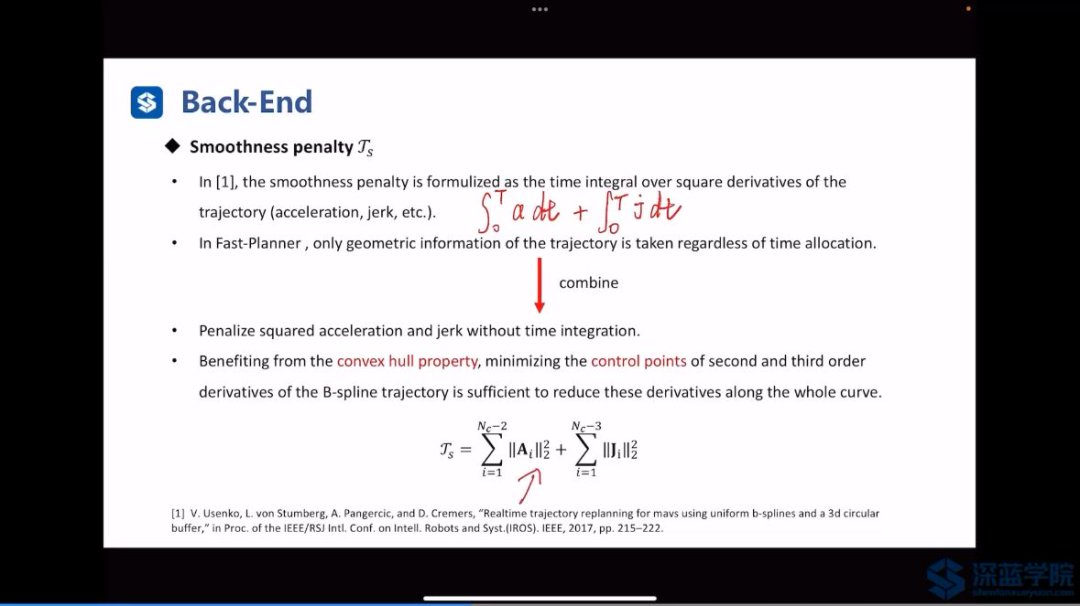
平滑性惩罚:
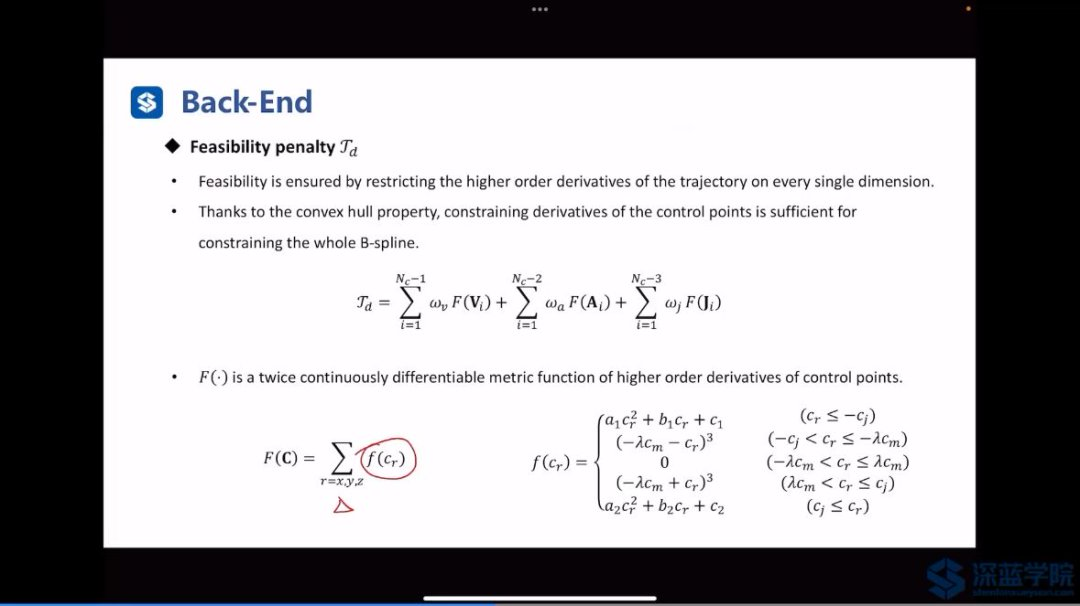
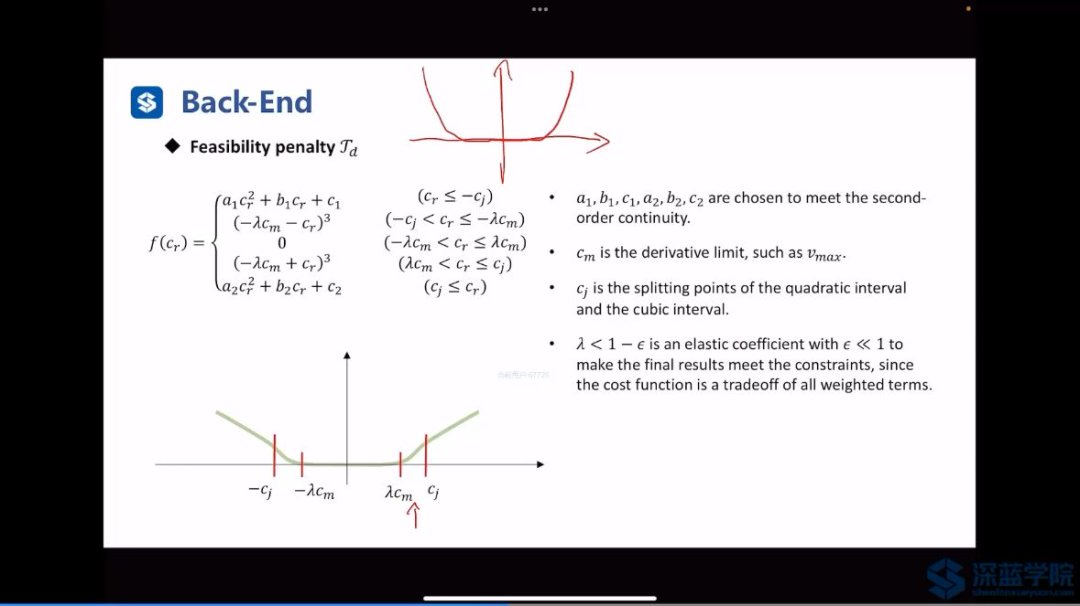
动力学可行性惩罚:
障碍物避障惩罚:
Ego Planner与Fast Planner之间的区别:
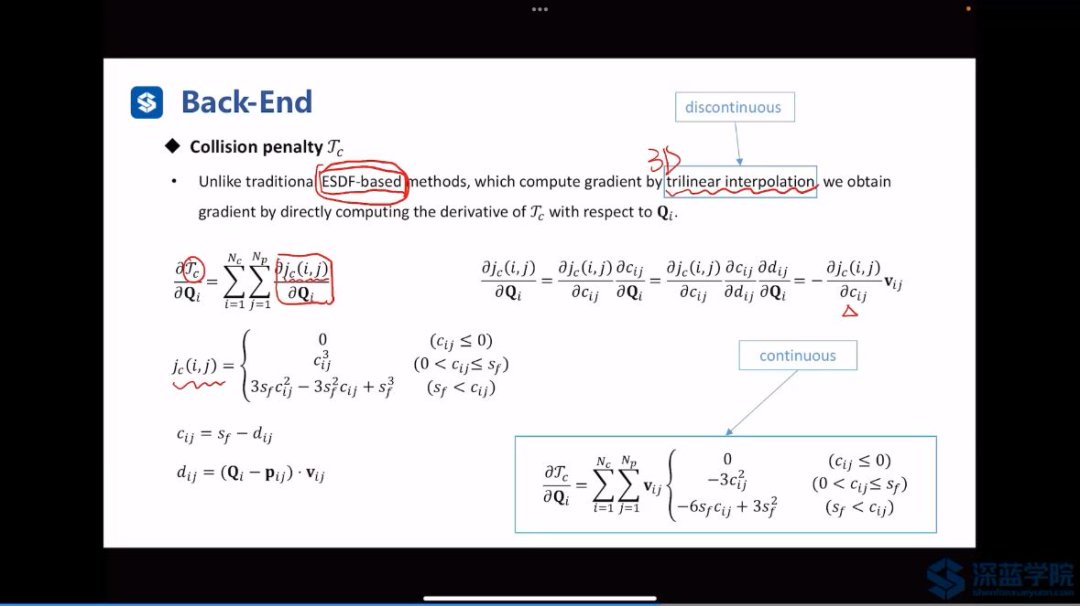
【注意】:无需ESDF地图进行3D三线性插值,现在的避障方式时间短,且是连续的。
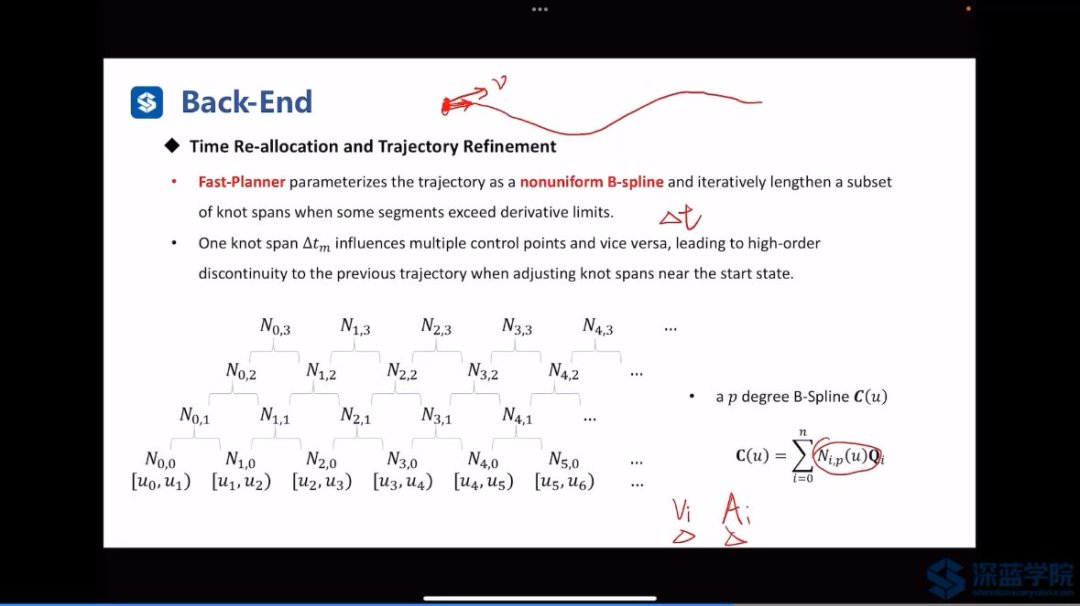
时间重分配与航迹优化:
时间重分配完,找到优化初值,然后再进行优化:
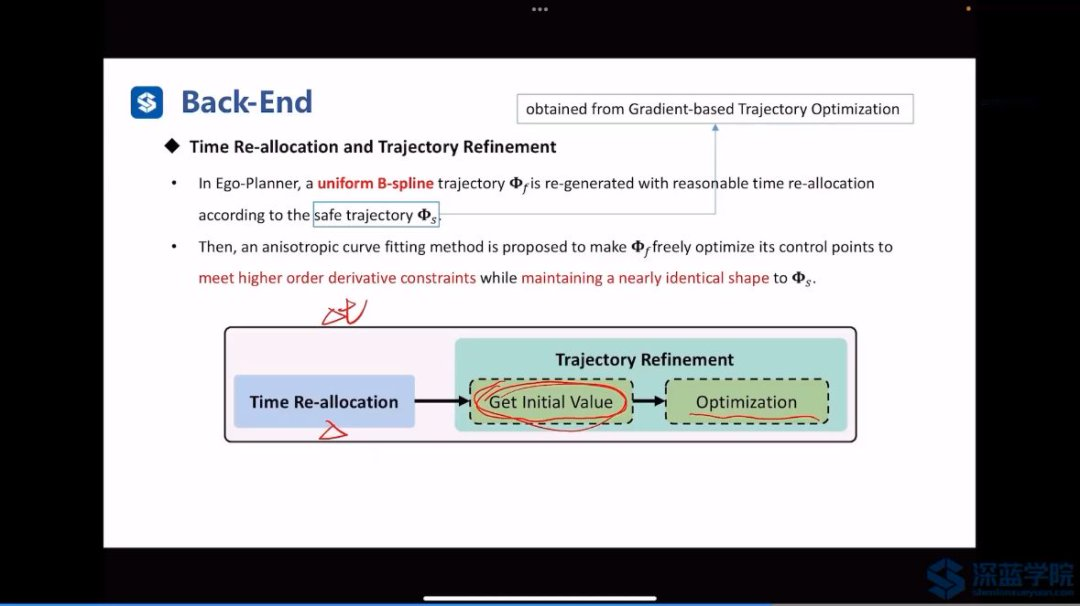
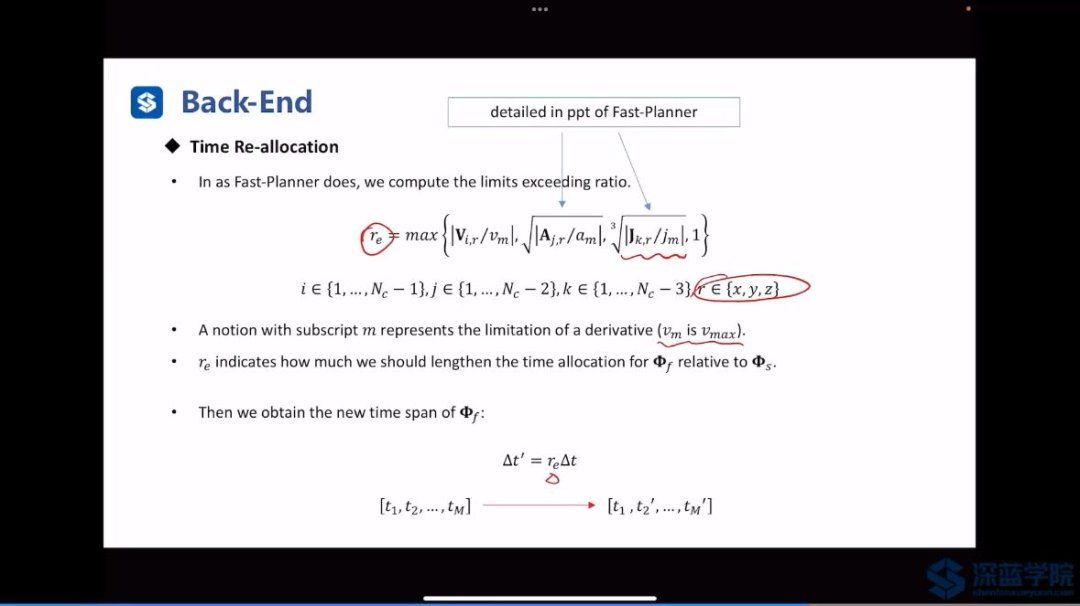
时间重分配让 变长:
变长:
航迹优化:初值
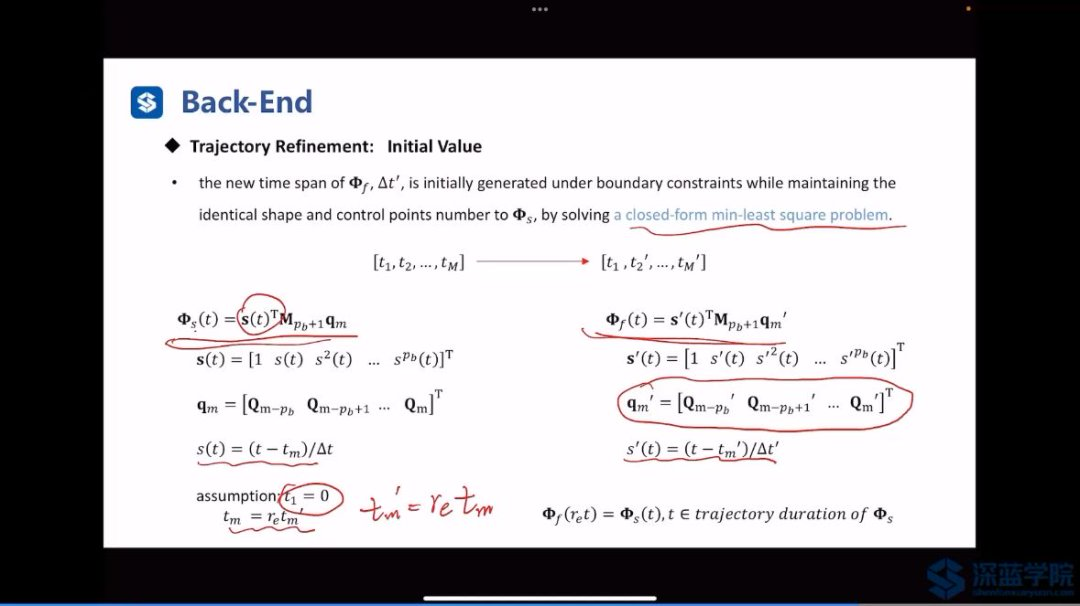
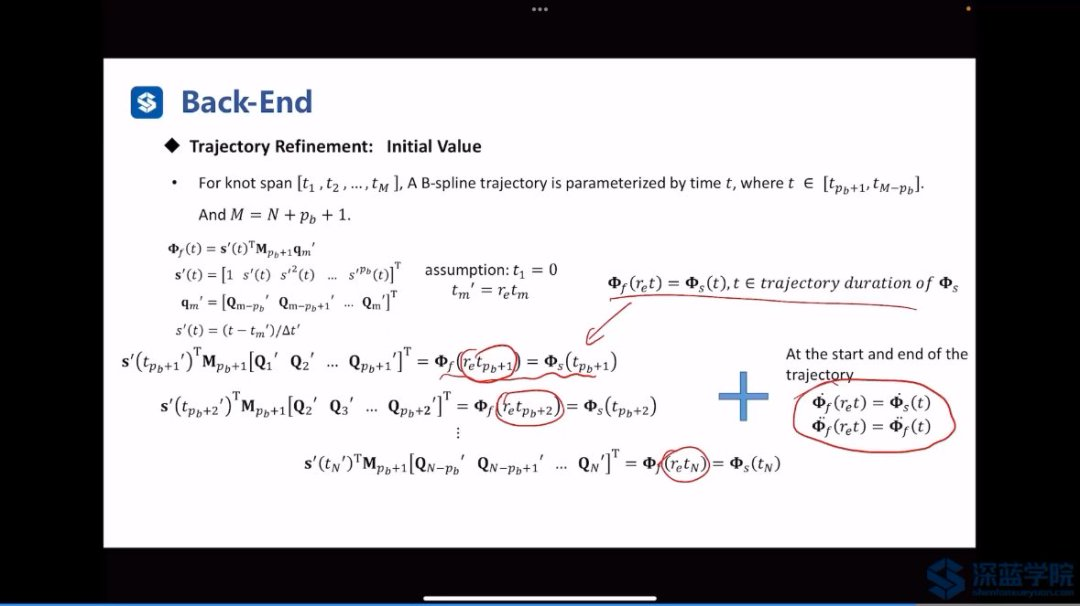
新轨迹在新时间上的轨迹与原轨迹在原时间上的轨迹相同:
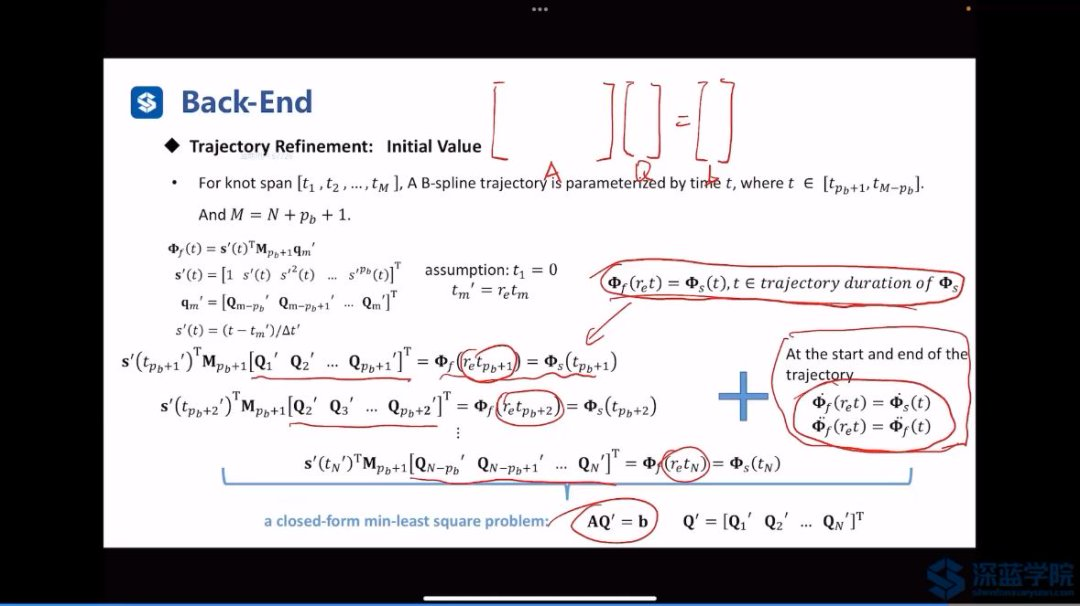
【注意】:用最小二乘进行求解。
优化问题:
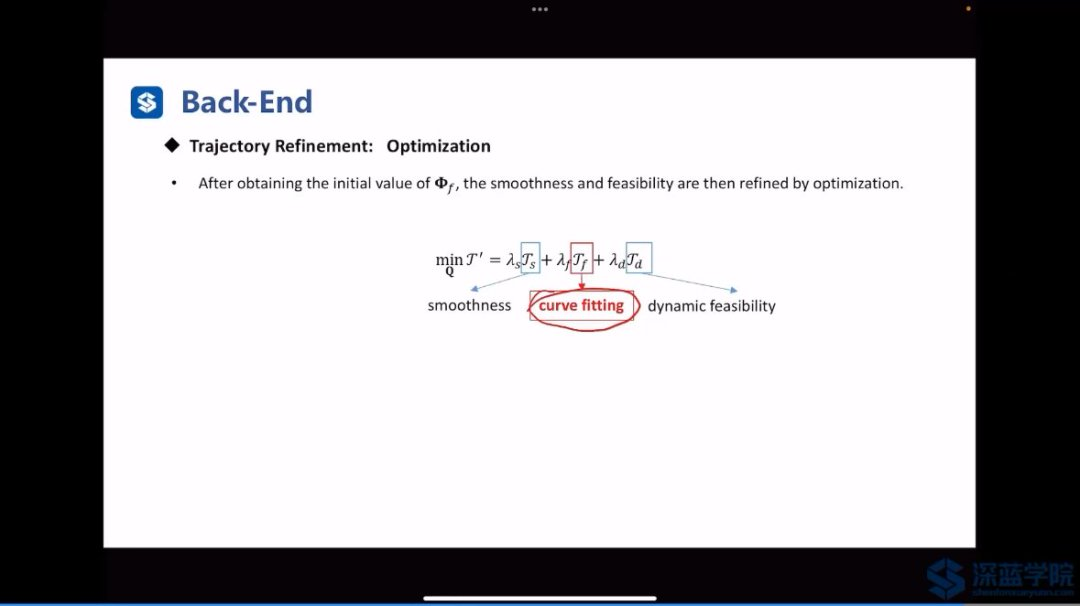
原轨迹已经考虑了避障的要求,只需要在速度方向一致的位置进行优化: