1 问题描述
大疆制图在跑大疆无人机飞的影像的时候,能够自动识别相机参数并且影像自带pos信息,但是用飞马无人机获取的影像pos信息与影像是分开的(飞马无人机数据处理有讲),所以在用大疆制图时需要对相机参数进行设置。
2 大疆制图操作流程(大疆无人机)
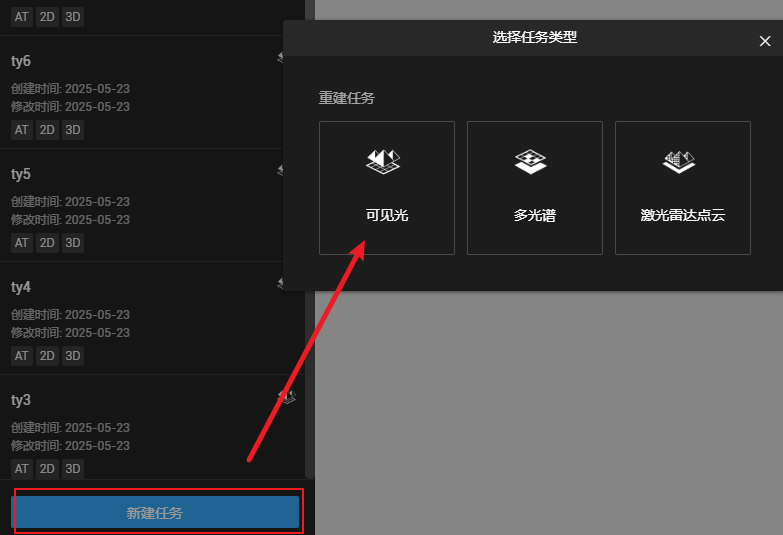
2.1 新建任务
点击新建任务,选择可见光
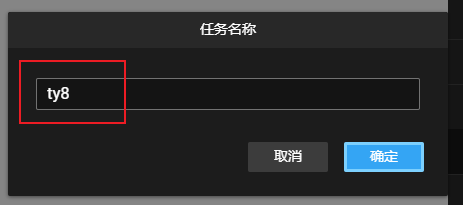
输入任务名称
2.2 导入照片
有两种方式导入图片:直接选择图片或文件夹(以此为例)
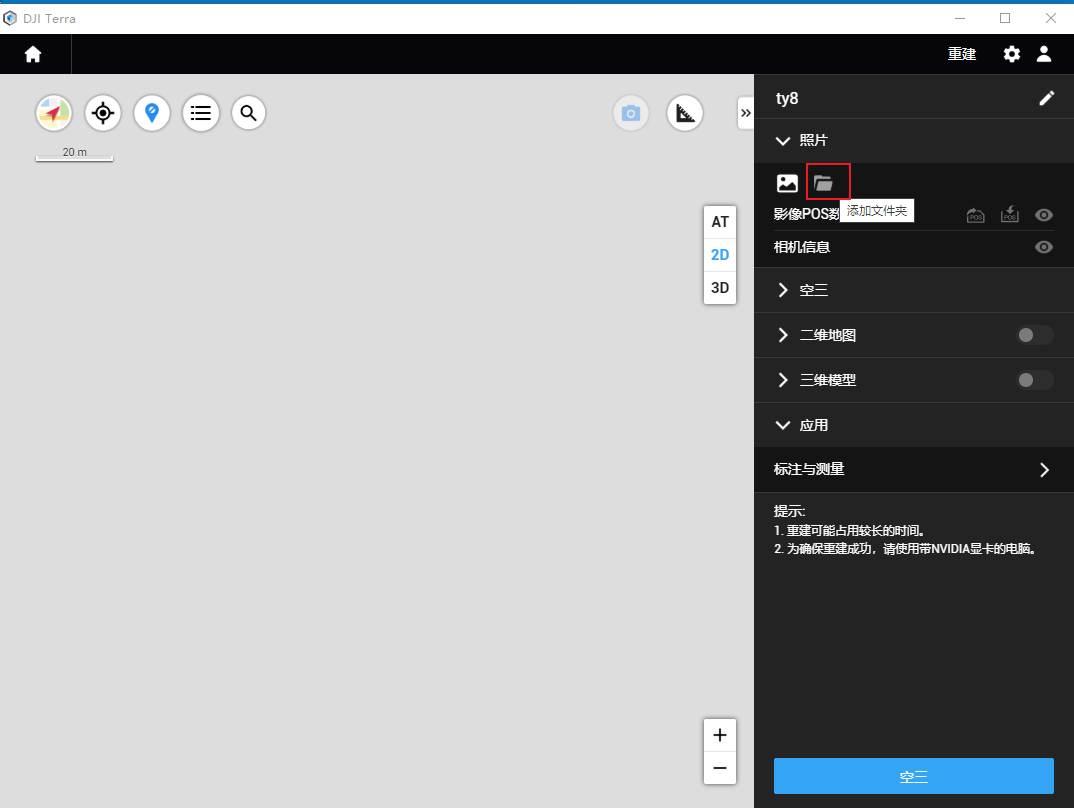
选择图片文件夹进行导入

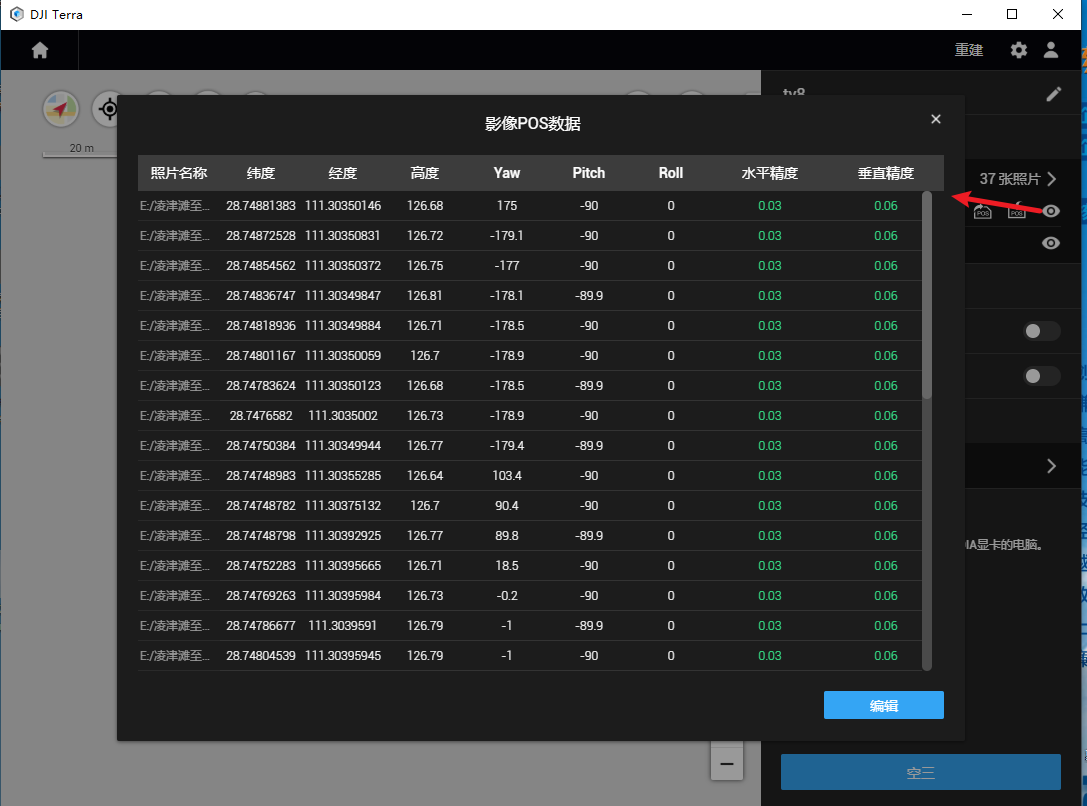
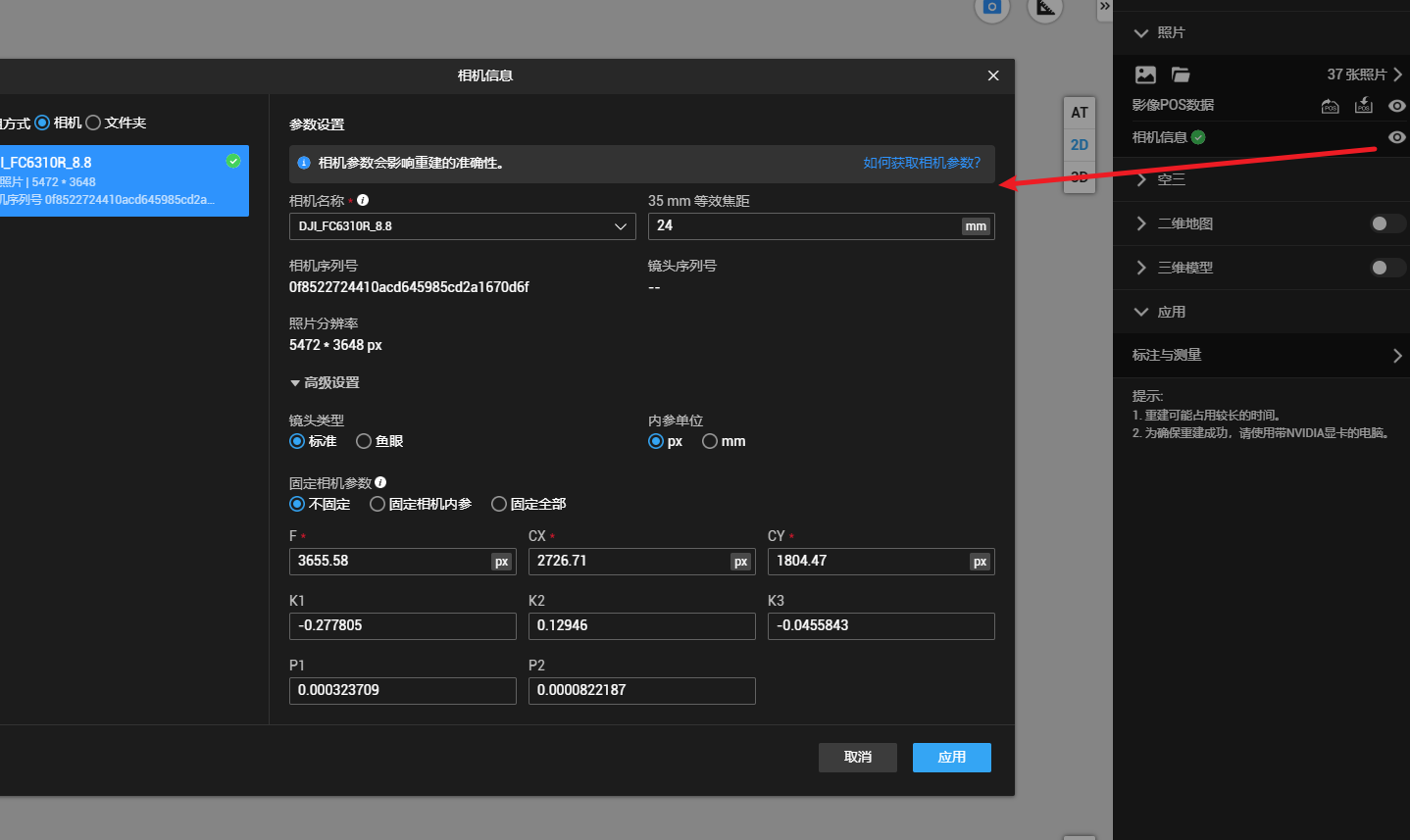
此时图片已导入,并获得了相机信息
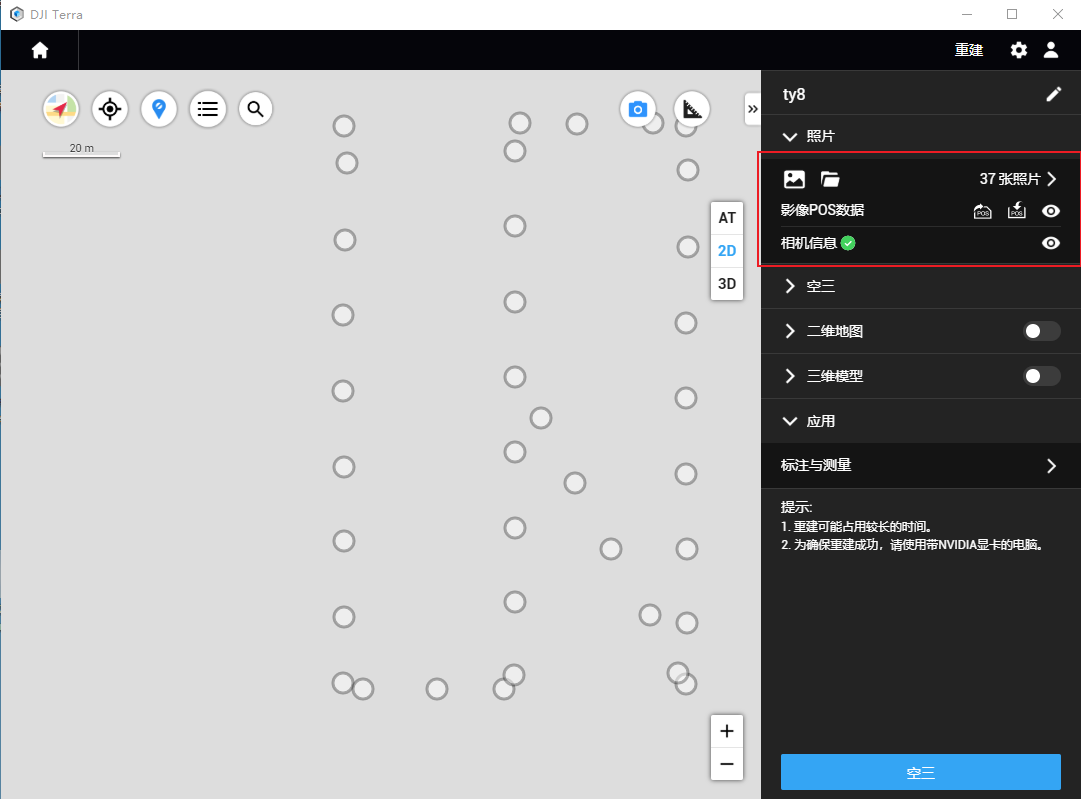
点击眼睛可以查看影像信息
以及相机信息
2.3 空三处理
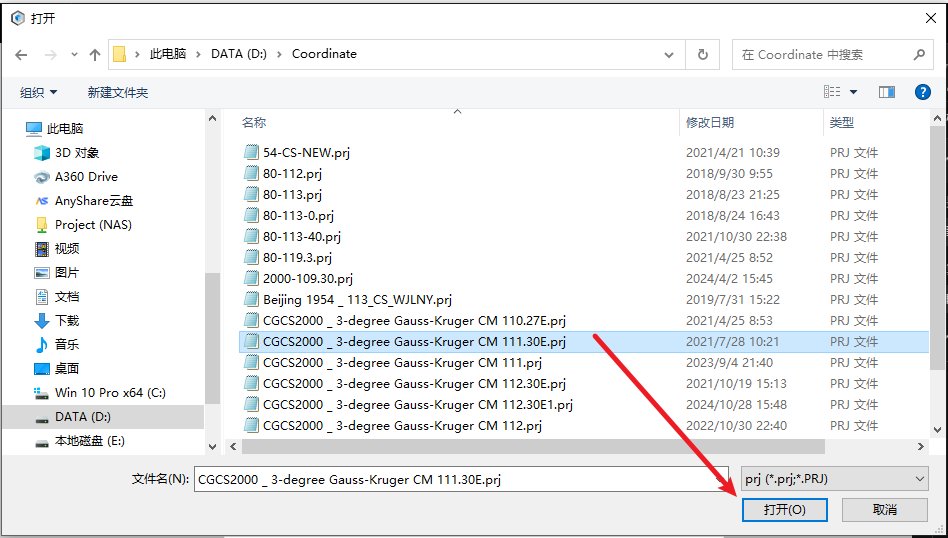
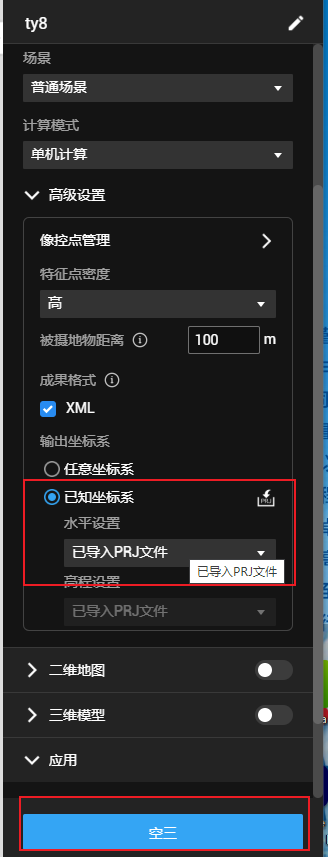
选择空三,点击高级设置,设置输出的坐标系
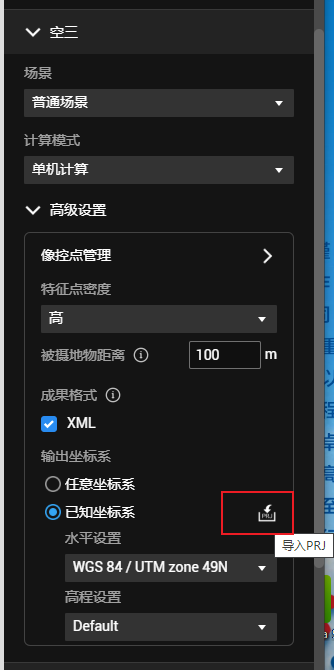
以2000-111-30为例,选择导入PRJ,选择对应的文件(自带的只有标准分带,非标准带需要自己设置中央子午线)
先进行一遍空三,后面好刺像控点些。
2.4 刺像控
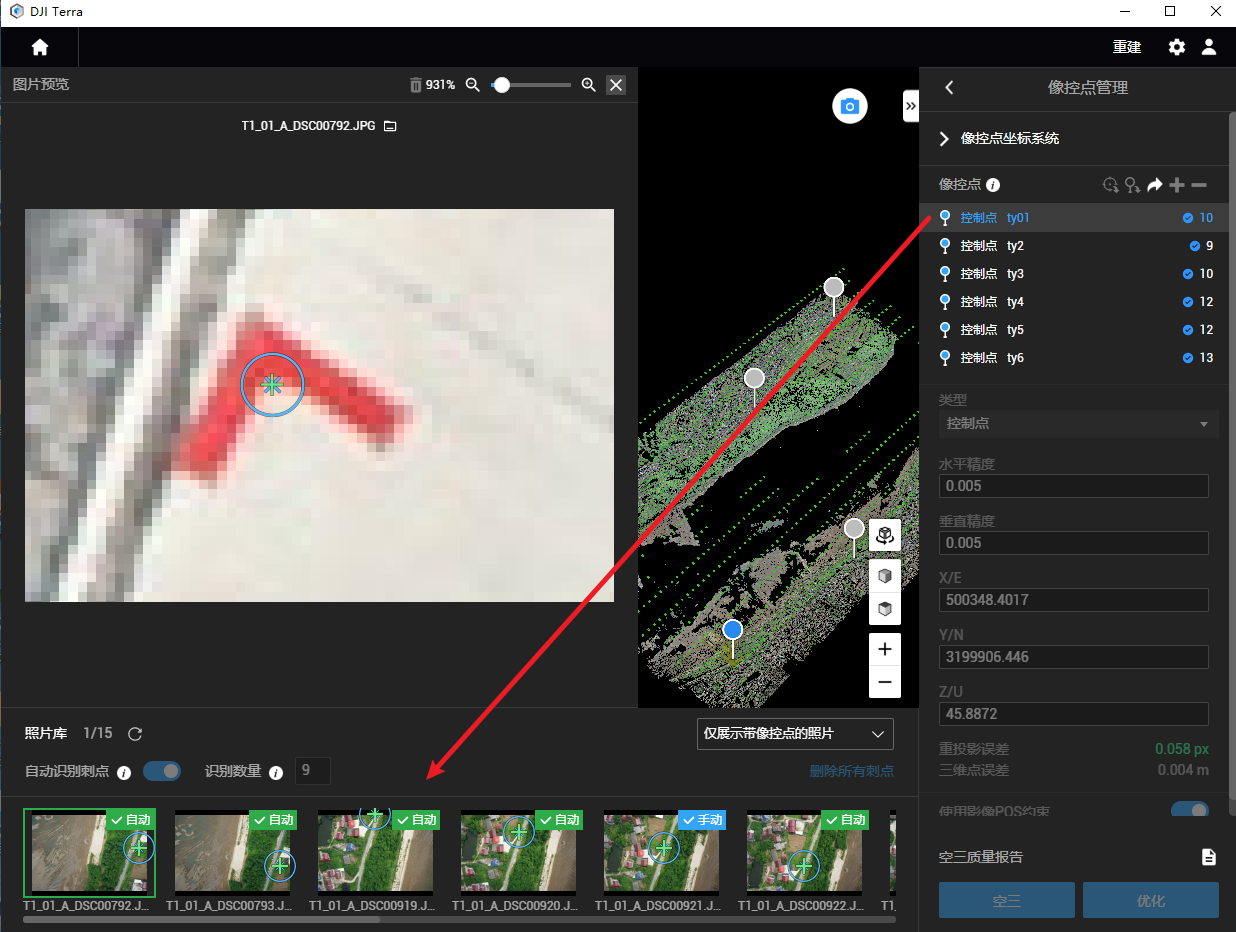
进入像控点管理
导入像控点数据
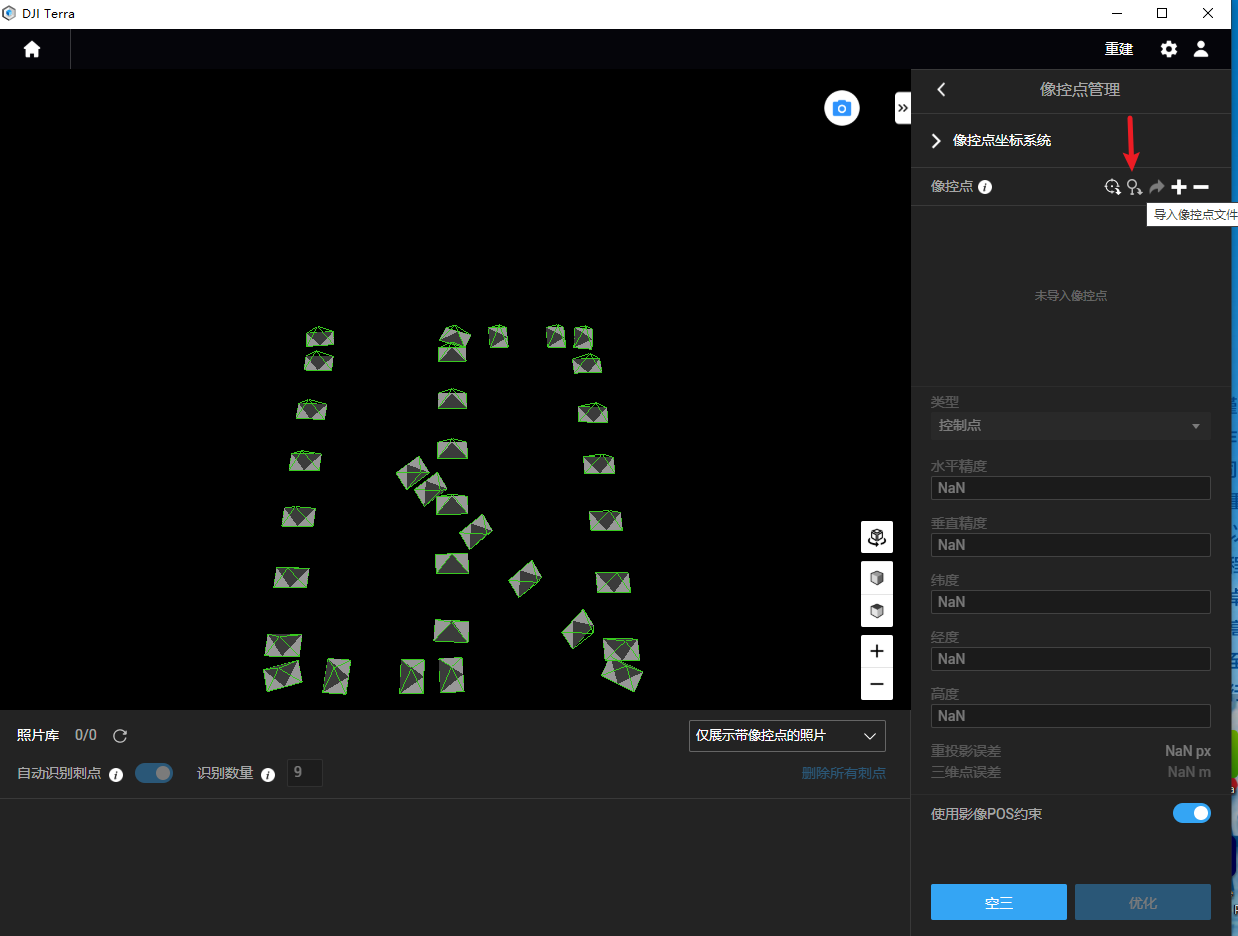
选择文件
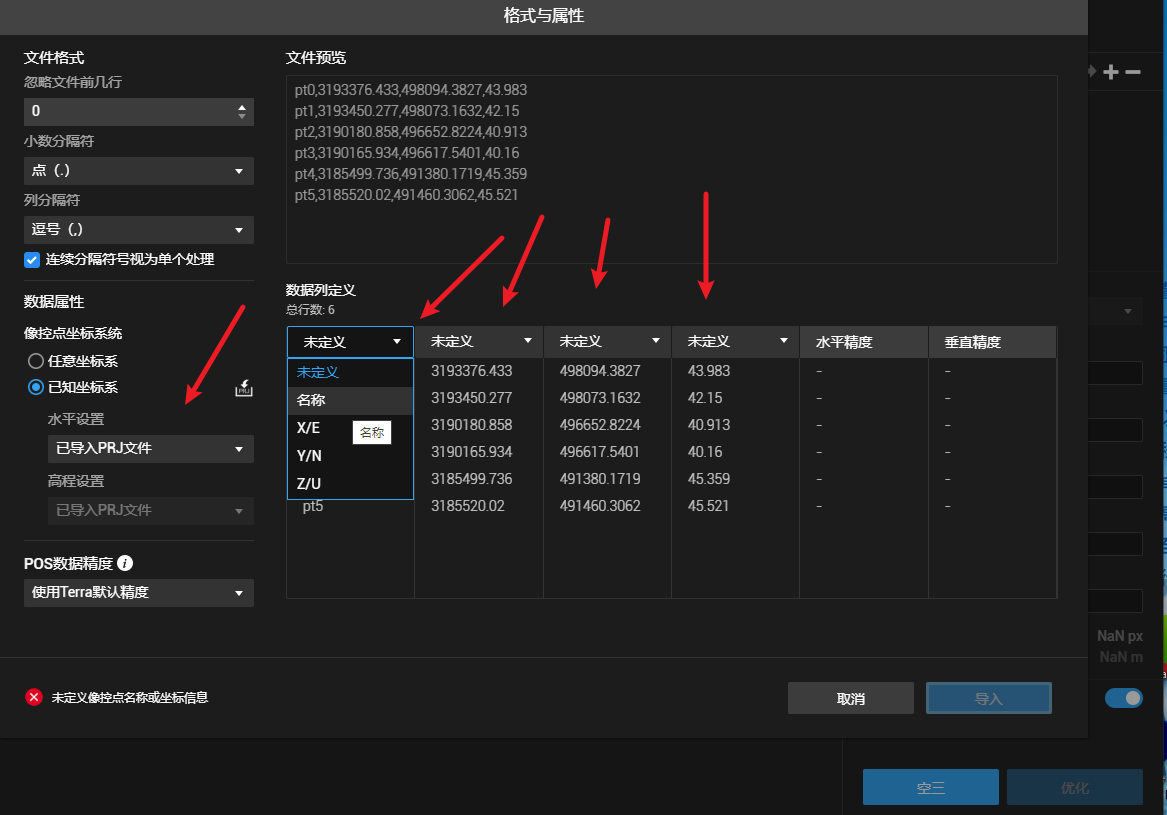
设置格式与属性
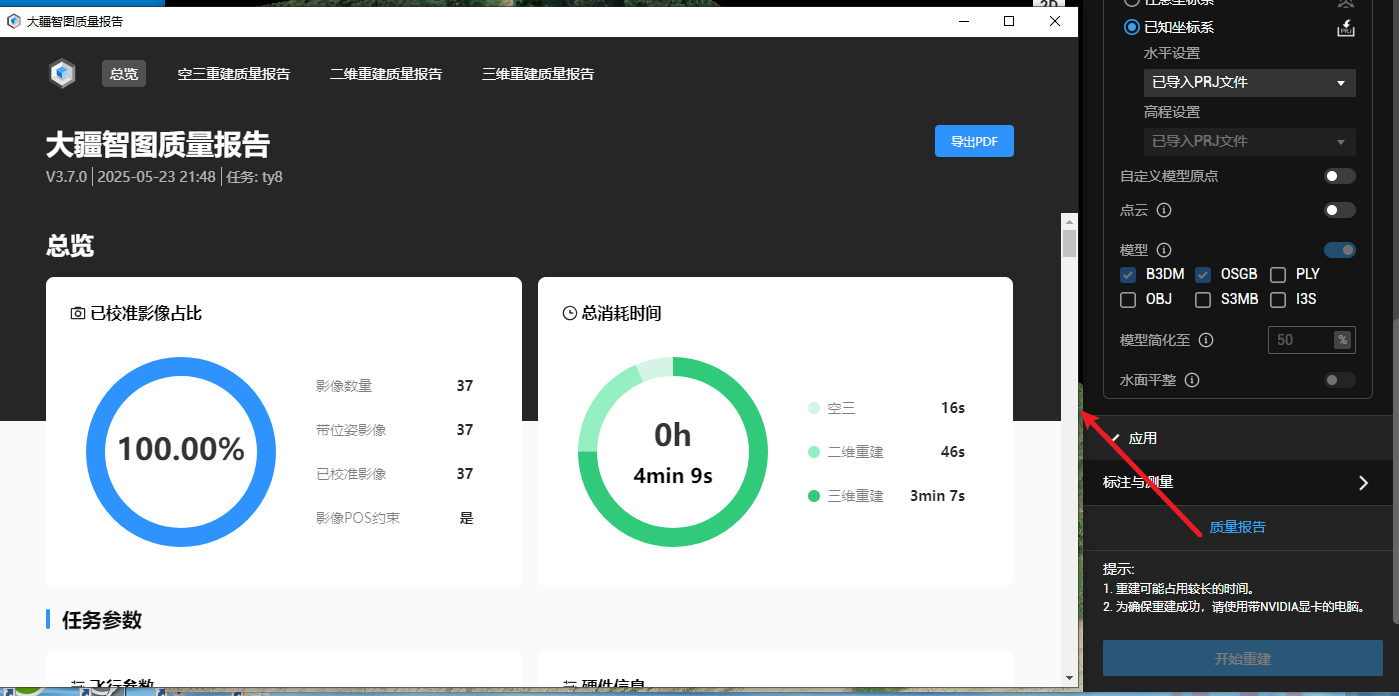
点击像控点会自动匹配照片,第一次手动点击后,它会自动识别刺点,对自动识别的结果进行检查,无误后,再次点击一下空三,查看质量报告,OK进入下一步。
2.4 生成正射和三维模型
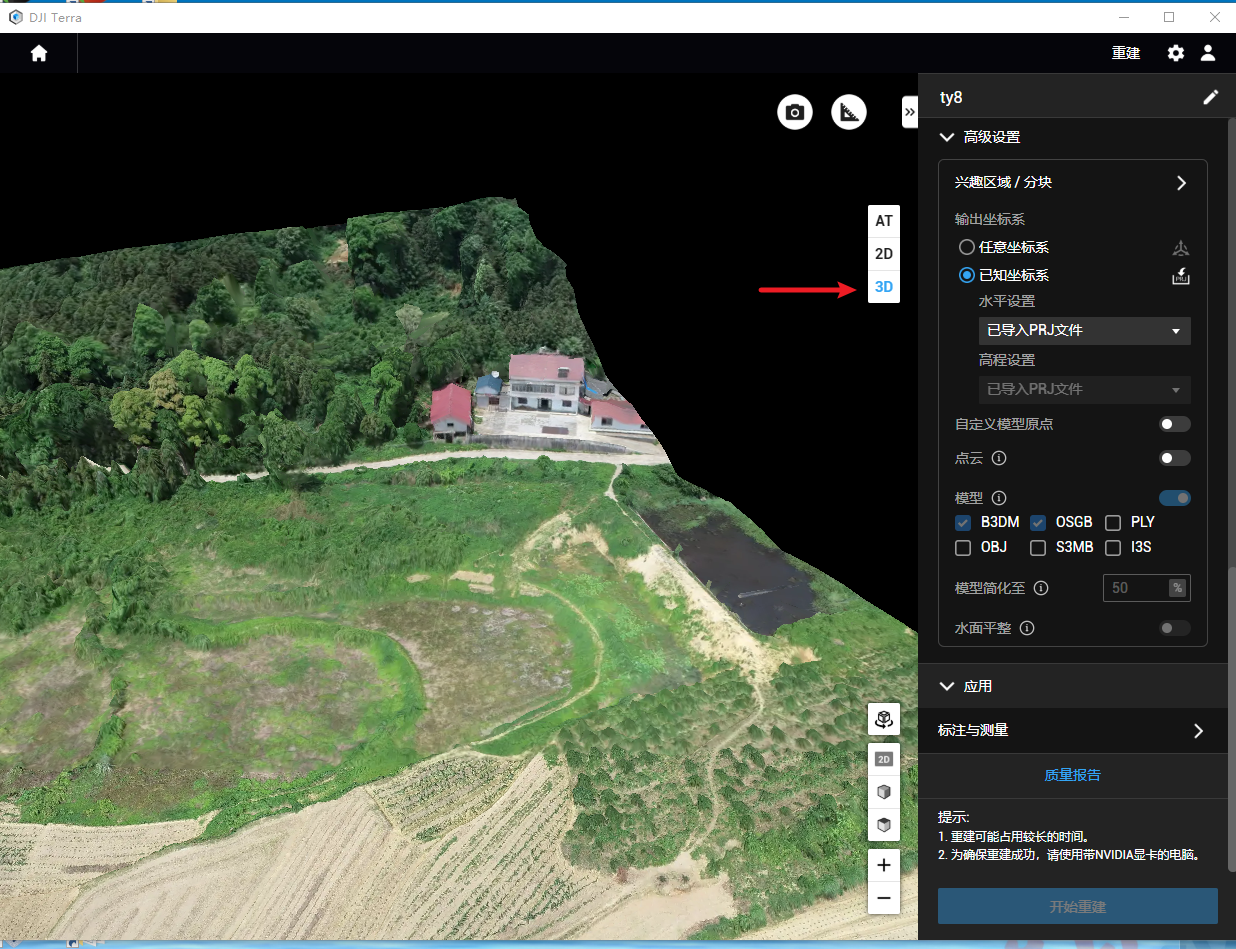
勾选二维地图和三维模型,注意三维模型勾选生成OSGB(CASS 3D可以直接加载)

点击开始重建
2.5 查看数据
查看空三
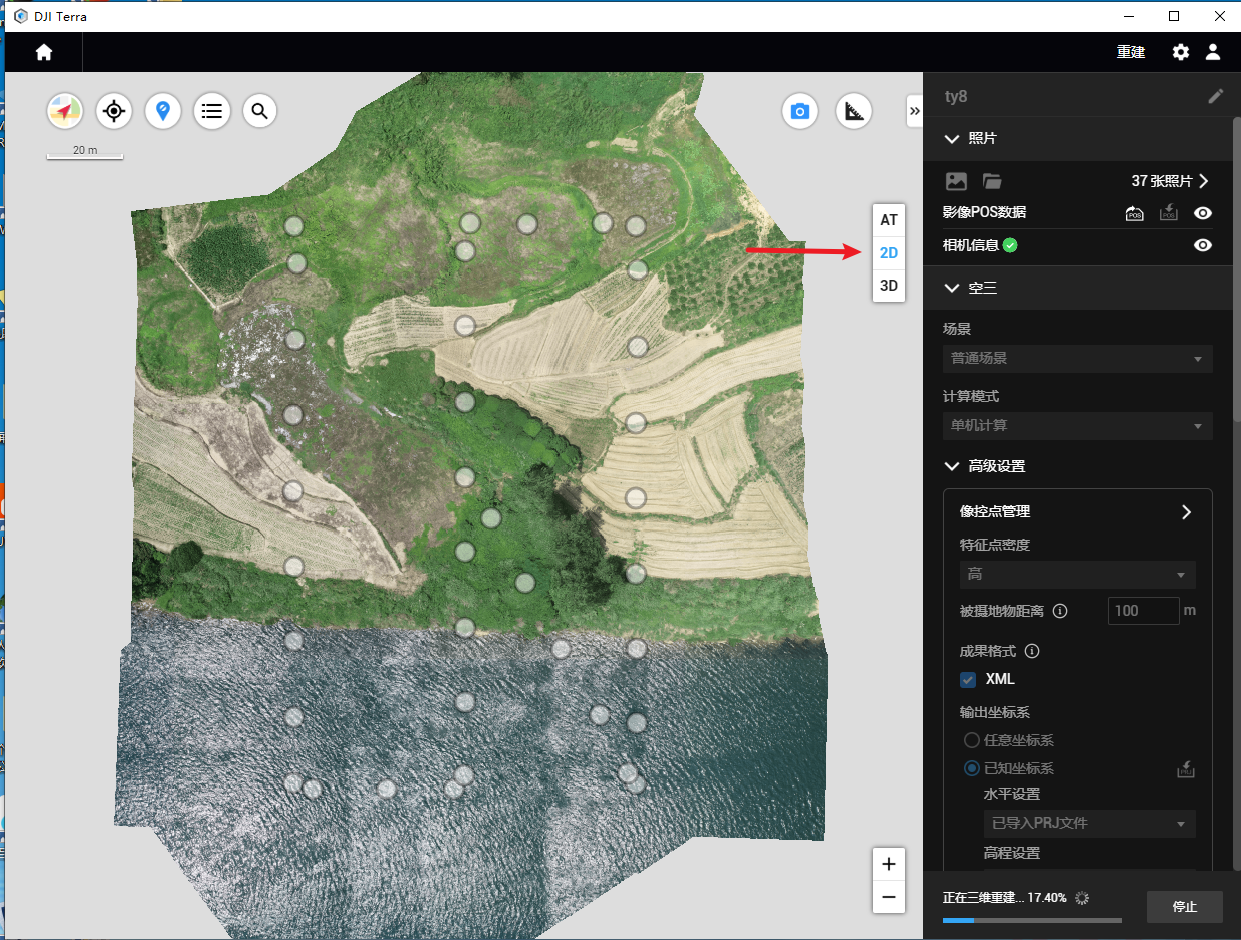
查看正射影像
查看三维模型
查看报告
2.6 导出成果
打开任务文件夹
三维模型位置
正射影像位置
3 飞马无人机图像处理操作流程
操作与前面差不多,需要注意的是POS和相机参数需要手动导入修改。
3.1 POS导入
在此之前需要对飞马无人机数据进行预处理(前面教程有说明),得到与影像对应的POS文件。
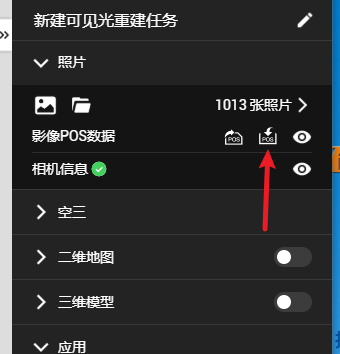
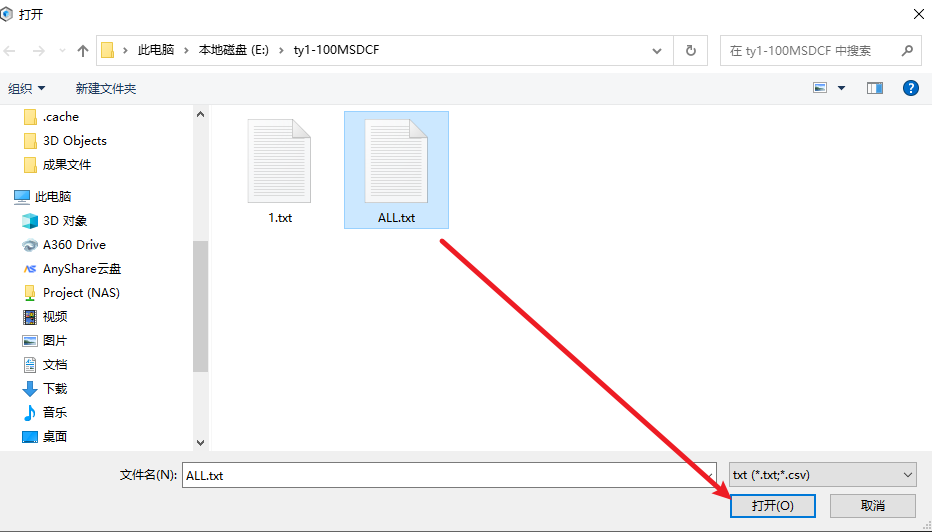
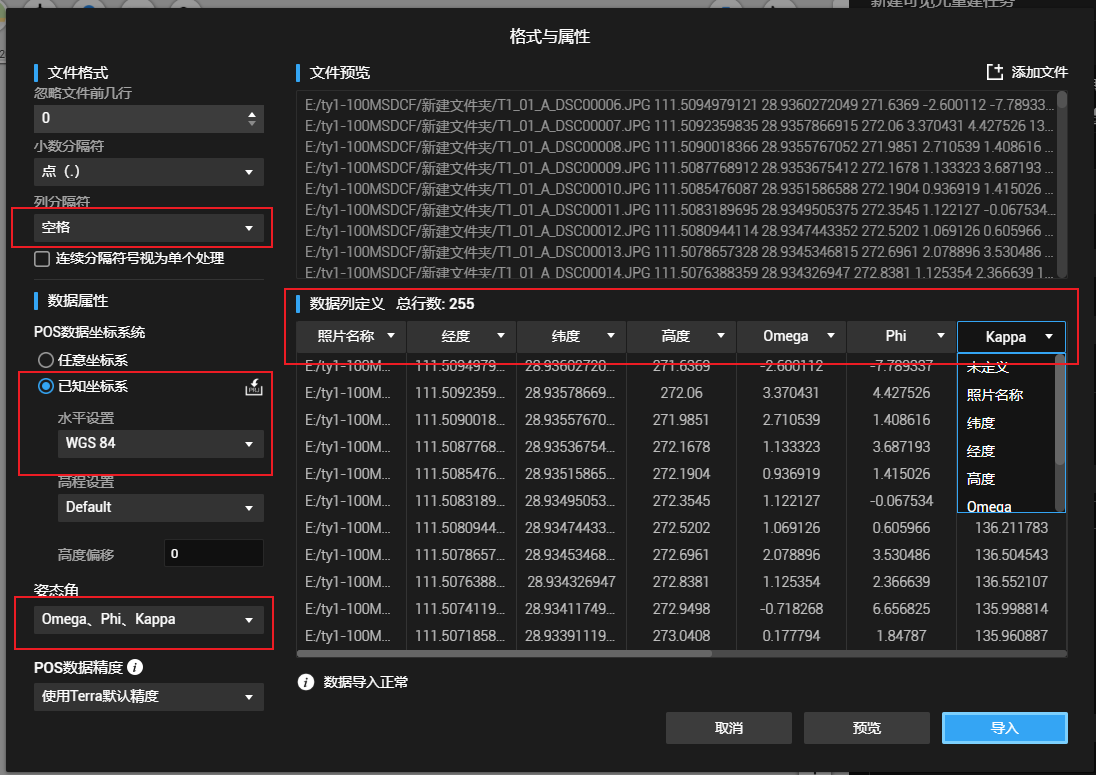
设置格式与属性,注意一一对应上。
3.2 设置相机参数
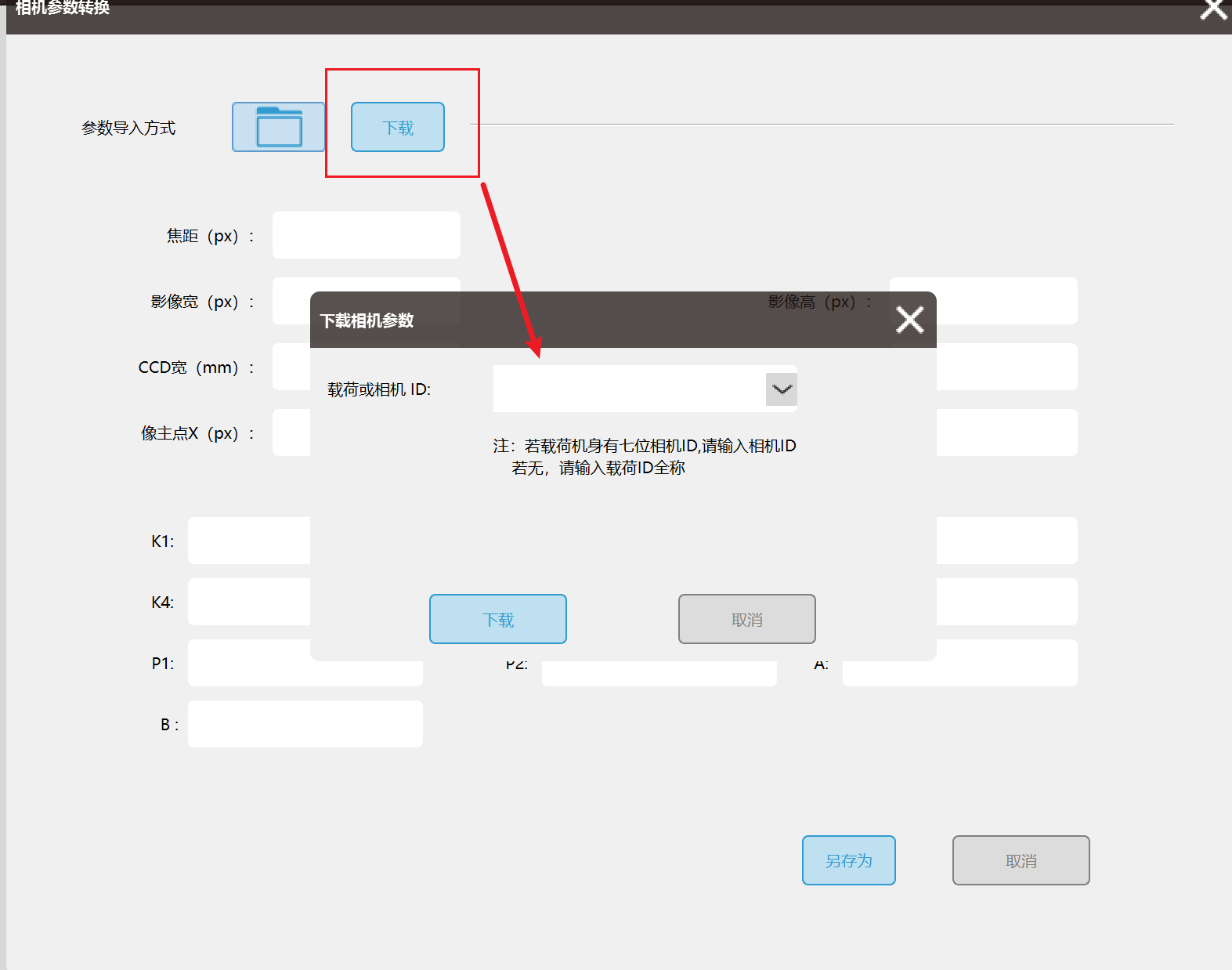
3.2.1 飞马相机参数下载
打开智理图

点击相机参数转换

点击下载,输入相机ID
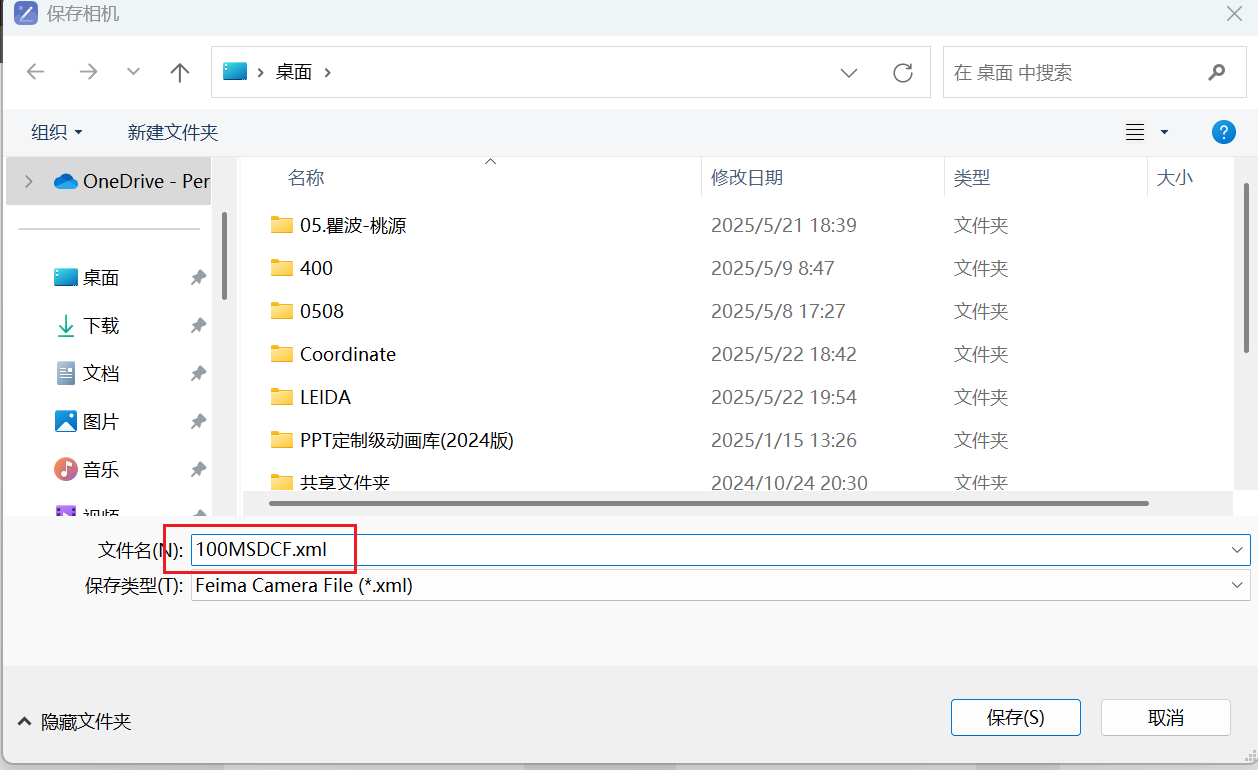
下载完成后,点击另存为,得到相机参数文件

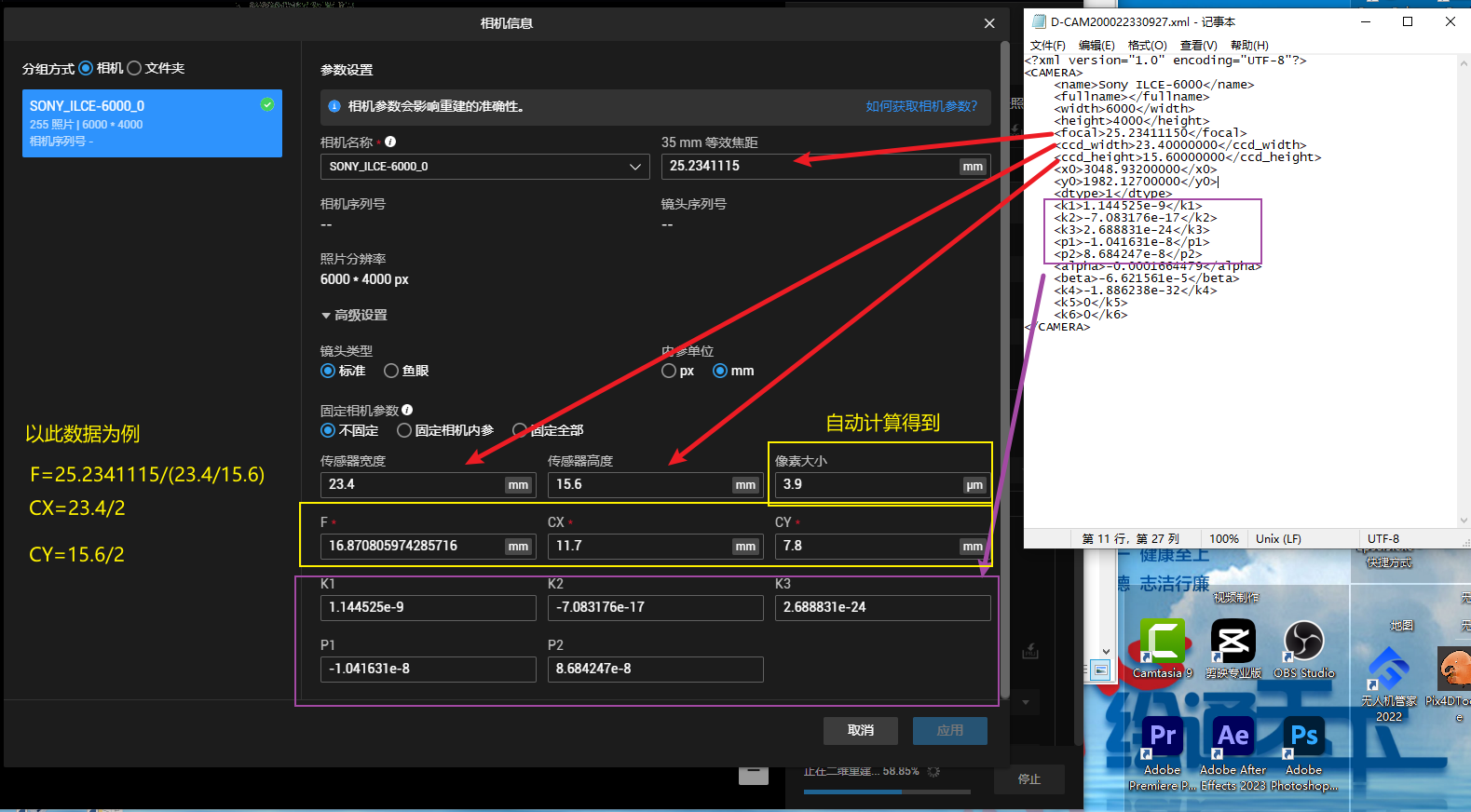
3.2.2 相机参数设置(非常重要!!)
根据相机文件设置对应参数,单位选择mm。(CX、CY指传感器中心位置)