清华大学自动化系李翔老师团队针对上肢外骨骼机器人提出一种基于生成模型的轨迹优化框架,该框架能够生成高度个性化的运动轨迹并确保安全性,从而为中风患者提供个性化康复辅助训练。相关研究论文"Upper-limb rehabilitation with a dual-mode individualized exoskeleton robot: A generative-model-based solution"发表于机器人研究领域顶级期刊The International Journal of Robotics Research。
NOKOV度量动作捕捉系统在研究中精准测量患者健康侧肢体的关节角度数据,用于外骨骼机器人调整受影响侧的参考轨迹,助力实现个性化的康复训练。
引用格式
Chen Y, Miao S, Ye J, et al. Upper-limb rehabilitation with a dual-mode individualized exoskeleton robot: A generative-model-based solution. The International Journal of Robotics Research. 2025;0(0). doi:10.1177/02783649251333479
研究背景
外骨骼机器人在中风康复中具有重要作用,但现有的上肢外骨骼机器人在自由度和个性化辅助方面存在不足,无法完全匹配健康人的运动范围,也无法根据患者的实时反馈调整交互力,从而限制了康复训练的质量和效果。为克服这些局限性,李翔老师研究团队开发了一款新型双模式个性化上肢外骨骼机器人,旨在通过在线生成能力提供个性化的中风康复训练支持。
本文贡献
本文介绍了一种基于生成模型的双模式个性化框架。该框架包含一个意图预测器和一个异常检测器,用于捕捉患者未受影响一侧肢体的运动意图,并在康复任务中实时评估人机交互的安全性和自然性。在主动镜像模式下,辅助动作反映了患者原始的运动意图;而在被动跟随模式下,辅助动作则根据交互反馈进行个性化调整。
整体结构
新型上肢外骨骼机器人的整体架构,包括其硬件设计和软件系统。硬件方面,机器人具备六个自由度,采用串联弹性驱动器和绳牵引机制,以实现柔顺驱动和高安全性。软件方面,机器人采用分层控制架构,底层负责运动控制和环境感知,高层运行在个人电脑上,执行运动规划和计算密集型任务,所有程序集成在机器人操作系统中。
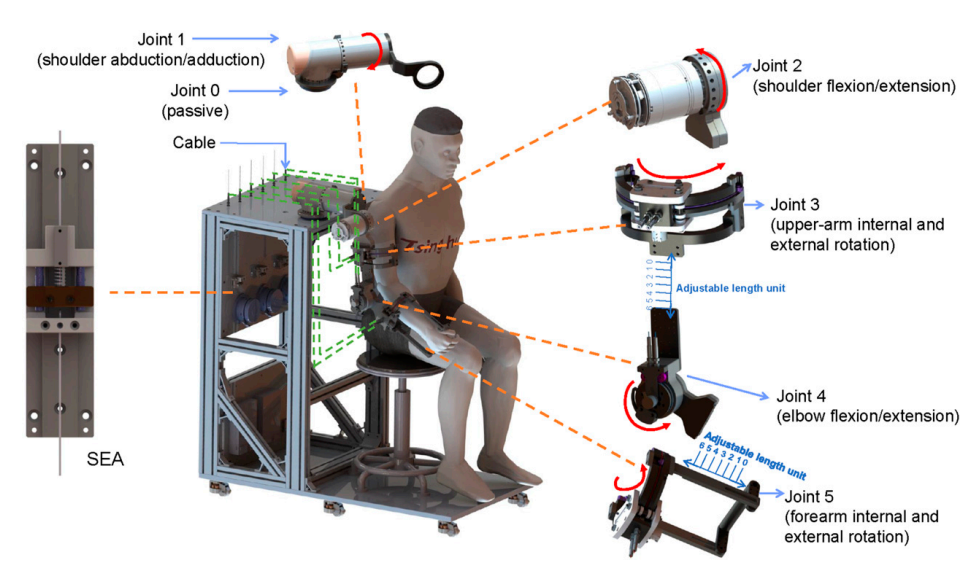
图片-上肢外骨骼机器人的开发概述:该机器人由绳牵引驱动,包含五个主动关节(关节1至关节5)和一个被动关节(关节0)。红色箭头指示关节正向运动的方向。
验证实验
**1.主动镜像训练实验:**为验证所提出方法在主动镜像训练中的有效性,研究进行了外部冲击测试、异常区域识别测试以及整体运动跟踪测试。实验中,通过NOKOV度量动作捕捉系统精准测量患者健康侧肢体的关节角度数据,用于外骨骼机器人调整受影响侧的参考轨迹。
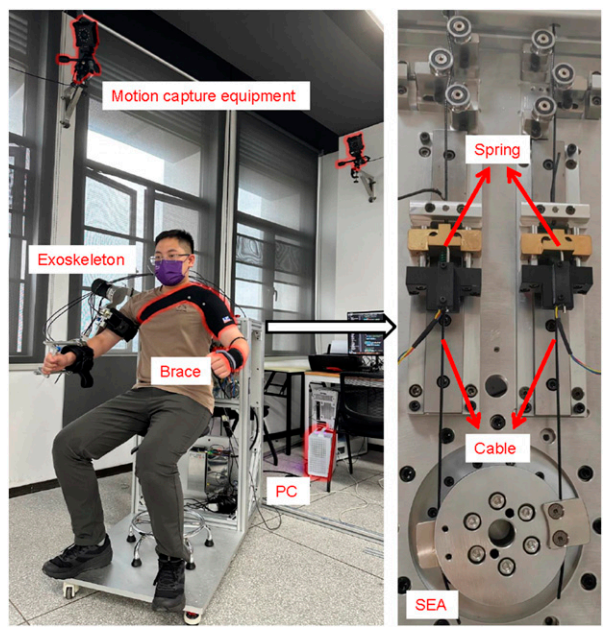
图片-在主动镜像模式的实验设置中,使用了NOKOV度量动作捕捉系统来获取身体未受影响一侧的反馈。串联弹性驱动器(SEA)是通过用弹簧和钢缆连接电机输出端和关节末端构建的
实验结果表明,轨迹优化效果显著,实时性满足康复训练要求,人机交互稳定性良好。该方法能有效跟踪运动意图,适应意外变化,并引导机器人向安全区域移动。
主动镜像训练实验视频
**2.被动跟随训练实验:**为验证所提出的个体化框架在被动跟随训练任务中的有效性,研究进行了消融实验、个体化辅助效果评估以及临床试验。在临床实验结果中,实验组在所有评估指标上都显示出显著的改善,与初始评估相比,肌肉张力水平降低,FMA评分(Fugl-Meyer)提高,表明被动跟随训练加速了运动功能的恢复。
实验结果表明,本文提出的方法加速了运动功能的恢复,在肌肉张力水平和评分方面均有显著改善。
临床实验视频
NOKOV度量动作捕捉系统在为研究中的主动镜像训练实验提供高精度肢体关节角度数据,用于外骨骼机器人的参考轨迹,助力验证本文提出方法的有效性。
作者简介
陈煜,清华大学自动化系,博士研究生。主要研究方向:外骨骼机器人、人机交互
苗述,清华大学自动化系,博士后。主要研究方向:机器人辅助微操作、医疗机器人
叶晶,深圳市迈步机器人科技有限公司,联合创始人。主要研究方向:外骨骼机器人、运动控制、人工智能
陈功,深圳市迈步机器人科技有限公司,联合创始人。主要研究方向:康养外骨骼机器人、人机交互控制、脑机接口
程江华,深圳大学附属华南医院康复医学科治疗师长。主要研究方向:康复治疗技术的创新应用
杜科涛,深圳大学附属华南医院康复医学科负责人。主要研究方向:康复治疗技术的创新应用
李翔(通讯作者),清华大学自动化系,副教授、博士生导师。主要研究方向:灵巧操作、人机交互、医疗机器人、微型机器人