借鉴本文所述代码简单实现一下BFS,Astar和HybridAstar路径规划算法,用于辅助理解算法原理。
代码在这里,画图用到了matplotlibcpp库,需要先装一下,然后直接在文件目录下执行如下代码即可运行:
bash
mkdir build
cd build
cmake ..
make
./HAstar1. 场景
这里没考虑朝向
cpp
start_pose: 6, 10 // 起始点和朝向
end_pose: 90, 90 // 目标点和朝向
boundary: 0, 100, 0, 100 // 整个场景的边界(这里没有使用)
obstacle: 0, 0, 0, 100, 100, 100, 100, 0 // 整个场景的边界,四个顶点,顺时针组成一个四边形
obstacle: 12, 12, 12, 36, 30, 36, 30, 12 // 障碍物(下面都是),四个顶点,顺时针组成一个四边形
obstacle: 20, 50, 20, 80, 40, 80, 40, 50
obstacle: 50, 6, 50, 60, 60, 60, 60, 6
obstacle: 60, 70, 60, 95, 85, 95, 85, 70
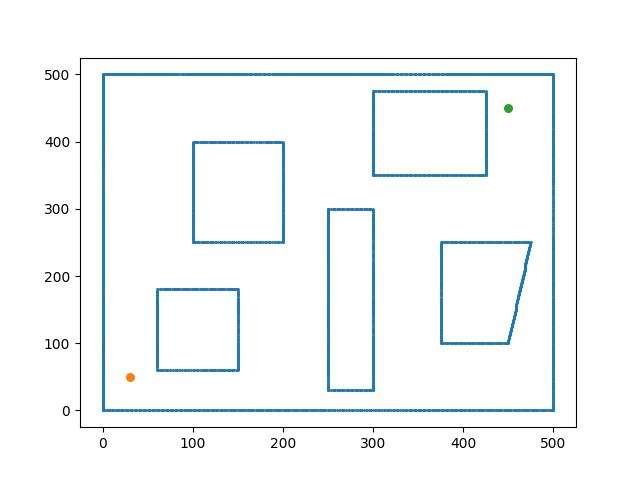
obstacle: 75, 20, 75, 50, 95, 50, 90, 20网格大小取0.2(可以选其他值,可能会有不同的效果),原点处网格坐标为(0,0),将场景信息都转化成网格坐标,场景示意图如下图所示,其中红色圆点是起点,绿色圆点是终点:
2. BFS
cpp
std::vector<Vec2i> bfs(const Scenario& scenario,
const std::unordered_set<Vec2i, Vec2iHash>& obstacles) {
// 每个节点的查找方向,左上右下
std::vector<Vec2i> neighbors{Vec2i{-1,0}, Vec2i{0,1}, Vec2i{1,0}, Vec2i{0,-1}};
// 每个节点的查找方向,8个方向
//vector<Vec2i> neighbors{Vec2i{-1,1}, Vec2i{0, 1}, Vec2i{1, 1},
// Vec2i{1,0}, Vec2i{1,-1}, Vec2i{0,-1},
// Vec2i{-1,-1}, Vec2i{-1,0}};
std::vector<Vec2i> path; // 路径结果
std::queue<Vec2i> open_nodes; // 待check的节点
std::unordered_map<std::string, Vec2i> pre_node; // 每个节点的父节点
bool isvalid = true;
Vec2i start{static_cast<int>(scenario.start_pos.x/RES_GRID),
static_cast<int>(scenario.start_pos.y/RES_GRID)};
Vec2i goal{static_cast<int>(scenario.end_pos.x/RES_GRID),
static_cast<int>(scenario.end_pos.y/RES_GRID)};
std::string goal_name = std::to_string(goal.x)+"_" + std::to_string(goal.y);
std::string start_name = std::to_string(start.x)+"_" + std::to_string(start.y);
open_nodes.push(start);
pre_node[start_name] = start;
while(!open_nodes.empty()){
Vec2i curr_node = open_nodes.front();
open_nodes.pop();
// 判断是否到达终点
if(curr_node.x == goal.x && curr_node.y == goal.y){
pre_node[goal_name] = pre_node[std::to_string(curr_node.x)+"_" + std::to_string(curr_node.y)];
break;
}
// 获取相邻的有效节点
for(int i = 0; i < 4; i++){
isvalid = true;
Vec2i neighbor{curr_node.x+neighbors[i].x, curr_node.y+neighbors[i].y};
// 检查节点是否已经被遍历过
std::string n_name = std::to_string(neighbor.x) + "_" + std::to_string(neighbor.y);
if(pre_node.find(n_name) != pre_node.end()){
continue;
}
// 简单的碰撞检测,节点附近一定范围内不能有障碍点
for(int i = -4; i< 5; i++){
for(int j = 4; j > -5; j--){
Vec2i pt{neighbor.x+i, neighbor.y+j};
if(obstacles.find(pt) != obstacles.end()){
isvalid = false;
break;
}
}
}
if(!isvalid) continue;
pre_node[n_name] = curr_node;
open_nodes.push(neighbor);
}
}
if(pre_node.find(goal_name) == pre_node.end()){
std::cout<<"未找到有效路径!"<<std::endl;
}
else{
std::cout<<"找到有效路径!"<<std::endl;
Vec2i pt = goal;
while(pt.x != start.x || pt.y != start.y){
path.emplace_back(pt);
pt = pre_node[std::to_string(pt.x) + "_" + std::to_string(pt.y)];
}
path.emplace_back(start);
}
return path;
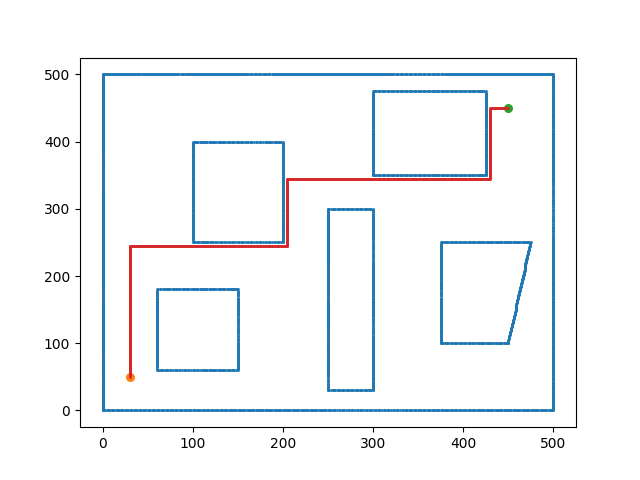
}运行结果如下图所示:
3. Astar
cpp
std::vector<Vec2i> AStar(const Scenario& scenario,
const std::unordered_set<Vec2i, Vec2iHash>& obstacles) {
// 每个节点的查找方向,8个方向
std::vector<Vec2i> neighbors{Vec2i{-1,1}, Vec2i{0, 1}, Vec2i{1, 1},
Vec2i{1,0}, Vec2i{1,-1}, Vec2i{0,-1},
Vec2i{-1,-1}, Vec2i{-1,0}};
std::vector<Vec2i> path; // 路径结果
// 节点队列,保存节点名和节点总代价(路径代价+启发函数代价)
std::priority_queue<std::pair<std::string, double>,
std::vector<std::pair<std::string, double>>, cmp> open_nodes_cost;
// <节点名,<节点坐标,节点路径代价>>
std::unordered_map<std::string, std::pair<Vec2i, double>> open_nodes;
// <节点名,<节点坐标,节点路径代价>>
std::unordered_map<std::string, Vec2i> close_nodes;
// 保存节点的父节点
std::unordered_map<std::string, Vec2i> pre_node;
bool isvalid = true;
Vec2i start{static_cast<int>(scenario.start_pos.x/RES_GRID),
static_cast<int>(scenario.start_pos.y/RES_GRID)};
Vec2i goal{static_cast<int>(scenario.end_pos.x/RES_GRID),
static_cast<int>(scenario.end_pos.y/RES_GRID)};
double start_cost = std::sqrt((goal.x - start.x)*(goal.x - start.x) +
(goal.y - start.y)*(goal.y - start.y));
std::string goal_name = std::to_string(goal.x) + "_" + std::to_string(goal.y);
std::string start_name = std::to_string(start.x) + "_" + std::to_string(start.y);
open_nodes_cost.emplace(start_name, start_cost);
open_nodes.emplace(start_name, std::pair<Vec2i, double>(start, 0));
pre_node.emplace(start_name, start);
while(!open_nodes_cost.empty()){
const std::string curr_name = open_nodes_cost.top().first;
open_nodes_cost.pop();
Vec2i curr_node = open_nodes[curr_name].first;
double curr_path_cost = open_nodes[curr_name].second;
// 判断是否到达终点
if(curr_node.x == goal.x && curr_node.y == goal.y){
pre_node[goal_name] = pre_node[curr_name];
break;
}
// 当前节点已check
close_nodes.emplace(curr_name, curr_node);
// 遍历相邻节点
for(int i = 0; i < 8; i++){
isvalid = true;
Vec2i neighbor{curr_node.x+neighbors[i].x, curr_node.y+neighbors[i].y};
std::string neighbor_name = std::to_string(neighbor.x) + "_" + std::to_string(neighbor.y);
// 简单的碰撞检测,节点附近一定范围内不能有障碍点
for(int i = -4; i< 5; i++){
for(int j = 4; j > -5; j--){
Vec2i pt{neighbor.x+i, neighbor.y+j};
if(obstacles.find(pt) != obstacles.end()){
isvalid = false;
break;
}
}
}
if(!isvalid) continue;
// 如果该点已经check过
if(close_nodes.find(neighbor_name) != close_nodes.end()){
continue;
}
// 计算节点代价
double neighbor_path_cost = curr_path_cost +
std::sqrt(neighbors[i].x*neighbors[i].x+neighbors[i].y*neighbors[i].y);
// 启发函数直接用欧式距离
double H_cost = std::sqrt((goal.x - neighbor.x)*(goal.x - neighbor.x) +
(goal.y - neighbor.y)*(goal.y - neighbor.y));
if(open_nodes.find(neighbor_name) == open_nodes.end()){
open_nodes.emplace(neighbor_name, std::pair<Vec2i, double>(neighbor, neighbor_path_cost));
open_nodes_cost.emplace(neighbor_name, H_cost+neighbor_path_cost);
pre_node[neighbor_name] = curr_node;
}
}
}
if(pre_node.find(goal_name) == pre_node.end()){
std::cout<<"未找到有效路径!"<<std::endl;
}
else{
std::cout<<"找到有效路径!"<<std::endl;
Vec2i pt = goal;
while(pt.x != start.x || pt.y != start.y){
path.emplace_back(pt);
pt = pre_node[std::to_string(pt.x) + "_" + std::to_string(pt.y)];
}
path.emplace_back(start);
}
return path;
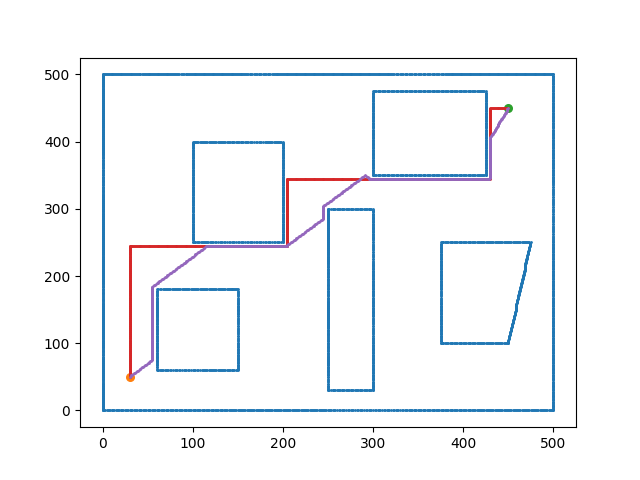
}与BFS结果一起显示,如下图所示,红色路径是BFS结果,紫色路径结果是Astar:
4. HybridStar
cpp
std::vector<Vec2i> HybridAStar(const Scenario& scenario,
const unordered_set<Vec2i, Vec2iHash>& obstacles,
double wheelbase, double step_size, double max_steer) {
std::shared_ptr<Node> last_node = nullptr;
std::vector<Vec2i> path; // 路径结果
// 节点队列,保存节点名和节点总代价(路径代价+启发函数代价)
std::priority_queue<std::pair<std::string, double>,
std::vector<std::pair<std::string, double>>, cmp> open_nodes_cost;
// <节点名,节点状态>
std::unordered_map<std::string, std::shared_ptr<Node>> open_nodes;
// <节点名,节点状态>
std::unordered_map<std::string, std::shared_ptr<Node>> close_nodes;
Node start(scenario.start_pos.x, scenario.start_pos.y, 0, 0, 0, nullptr);
Node goal(scenario.end_pos.x, scenario.end_pos.y, 0, 0, 0, nullptr);
Vec2i goal_index{static_cast<int>(goal.x / RES_GRID),
static_cast<int>(goal.y / RES_GRID)};
double start_cost = std::sqrt((goal.x - start.x)*(goal.x - start.x) +
(goal.y - start.y)*(goal.y - start.y)); // 真实坐标距离
Vec2i start_index{static_cast<int>(start.x / RES_GRID),
static_cast<int>(start.y / RES_GRID)};
std::string start_name = std::to_string(start_index.x) +"_" +
std::to_string(start_index.y) + "_" + std::to_string(0);
std::shared_ptr<Node> start_Node = std::make_shared<Node>();
start_Node->x = start.x;
start_Node->y = start.y;
start_Node->theta = start.theta;
start_Node->g = start.g;
start_Node->f = start.f;
start_Node->parent = nullptr;
open_nodes_cost.emplace(start_name, start_cost);
open_nodes.emplace(start_name, start_Node);
while(!open_nodes_cost.empty()){
const std::string curr_name = open_nodes_cost.top().first;
open_nodes_cost.pop();
auto curr_node = open_nodes[curr_name];
// 判断当前节点是否到达终点
Vec2i curr_index{static_cast<int>(curr_node->x / RES_GRID),
static_cast<int>(curr_node->y / RES_GRID)};
if(curr_index.x == goal_index.x && curr_index.y == goal_index.y){
last_node = curr_node;
break;
}
close_nodes[curr_name] = curr_node;
// 往下扩展,-45°到45°采样5次且只考虑前进
for(int i = 0; i < 5; i++){
std::shared_ptr<Node> next_Node = std::make_shared<Node>();
double next_x = 0;
double next_y = 0;
double next_theta = 0;
double steer = -M_PI/4 + i * (M_PI/8); // 转向角
if(i != 2){ // 转弯
double radius = wheelbase / tan(steer); // 转弯半径
double delt_theta = step_size / radius; // 航向角偏移
next_theta = NormalizeAngle(curr_node->theta - delt_theta); // 转向角正时右转,航向角向负偏移
if(radius < 0){ // 左转
next_x = curr_node->x + abs(radius)*(cos(curr_node->theta + abs(delt_theta))-cos(curr_node->theta));
next_y = curr_node->y + abs(radius)*(sin(curr_node->theta + abs(delt_theta))-sin(curr_node->theta));
}
else{ // 右转
next_x = curr_node->x + abs(radius)*(-cos(curr_node->theta - abs(delt_theta))+cos(curr_node->theta));
next_y = curr_node->y + abs(radius)*(sin(-curr_node->theta + abs(delt_theta))+sin(curr_node->theta));
}
}
else{ // 直行
next_x = curr_node->x - std::sin(curr_node->theta) * step_size;
next_y = curr_node->y + std::cos(curr_node->theta) * step_size;
next_theta = curr_node->theta;
}
next_Node->x = next_x;
next_Node->y = next_y;
next_Node->theta = next_theta;
next_Node->g = curr_node->g + step_size;
next_Node->f = next_Node->g + std::sqrt((next_Node->x-goal.x)*(next_Node->x-goal.x) +
(next_Node->y-goal.y)*(next_Node->y-goal.y));
next_Node->parent = curr_node;
Vec2i next_node{static_cast<int>(next_Node->x / RES_GRID),
static_cast<int>(next_Node->y / RES_GRID)};
std::string next_name = std::to_string(next_node.x) + "_" +
std::to_string(next_node.y)+"_"+to_string(i);
if (close_nodes.find(next_name) != close_nodes.end()) {
continue;
}
// 简单的碰撞检测,节点附近一定范围内不能有障碍点
bool isvalid_node = true;
for(int i = -4; i< 5; i++){
for(int j = 4; j > -5; j--){
Vec2i pt{next_node.x+i, next_node.y+j};
if(obstacles.find(pt) != obstacles.end()){
isvalid_node = false;
break;
}
}
}
if(!isvalid_node) continue;
if(open_nodes.find(next_name) == open_nodes.end()){
open_nodes.emplace(next_name, next_Node);
open_nodes_cost.emplace(next_name, next_Node->f);
}
}
}
if(last_node == nullptr){
std::cout<<"未找到有效路径!"<<std::endl;
}
else{
std::cout<<"找到有效路径!"<<std::endl;
std::shared_ptr<Node> temp_node = last_node;
while(temp_node->parent != nullptr){
path.emplace_back(Vec2i{static_cast<int>(temp_node->x / RES_GRID),
static_cast<int>(temp_node->y / RES_GRID)});
temp_node = temp_node->parent;
}
}
return path;
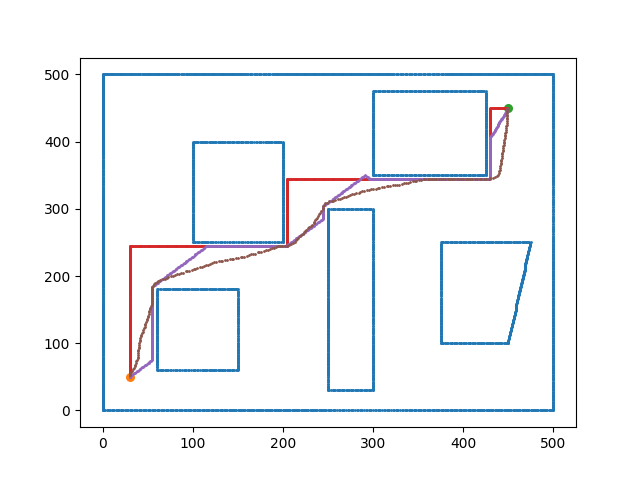
}与BFS和Astar的结果一起显示,如下图所示,红色路径是BFS结果,紫色路径结果是Astar,棕色路径是HybridAstar,看起来不是很平滑,感兴趣的可以自己调调看: