一、基本概念与用途
minAreaRect是OpenCV中用于计算点集的最小面积旋转矩形的函数。在计算机视觉领域,它常被用于:
- 目标检测中获取倾斜对象的边界框(如倾斜的车牌、文本行、工业零件)
- 形状分析与识别(如确定物体的主方向)
- 图像预处理(如校正倾斜的文档)
- 机器人视觉(如Robomaster比赛中识别装甲板、灯条)
与轴对齐边界框(boundingRect)的区别:
boundingRect计算的是完全包含点集的最小矩形,但不考虑旋转,通常面积更大minAreaRect计算的是可旋转的最小矩形,能更精确地拟合非轴对齐对象
二、函数定义与参数
1. 函数原型
cpp
// C++
RotatedRect minAreaRect(InputArray points);
// Python
retval = cv2.minAreaRect(points)2. 参数说明
- points :输入点集,可以是:
- C++:
vector<Point>或vector<Point2f> - Python:
numpy.ndarray,形状为(N, 2),数据类型为float32
- C++:
- 返回值 :
RotatedRect对象(C++)或元组((cx, cy), (w, h), angle)(Python)
三、核心知识点讲解
1. 算法原理
minAreaRect基于旋转卡壳算法(Rotating Calipers)实现:
- 计算点集的凸包(Convex Hull)
- 对凸包的每条边,找到距离该边最远的点和垂直方向上的对边
- 计算当前边作为底边时的外接矩形面积
- 旋转卡壳,遍历所有可能的方向,记录最小面积的矩形
该算法的时间复杂度为O(n log n)(凸包计算)+ O(n)(旋转卡壳),其中n为点的数量。
2. 返回值解析
返回的RotatedRect对象包含三个关键属性:
- center :矩形中心点坐标
(cx, cy) - size :矩形尺寸
(width, height),通常width ≥ height - angle :旋转角度,范围为(-90°, 0°],表示矩形的水平轴(长边)与图像x轴的夹角,逆时针为正
角度约定说明:
- 当矩形为水平或接近水平时,
angle接近0° - 当矩形为垂直或接近垂直时,
angle接近-90° - OpenCV会自动调整宽高和角度,确保
width ≥ height
3. 输入点集要求
- 点的数量:至少需要3个点才能构成矩形
- 点的分布:点集应能大致表示一个矩形或近似矩形的形状
- 数据类型 :Python中必须使用
float32类型的NumPy数组
示例代码(Python):
python
import cv2
import numpy as np
# 创建点集(例如一个倾斜的矩形轮廓)
points = np.array([[10, 10], [50, 0], [90, 40], [50, 90]], dtype=np.float32)
# 计算最小面积旋转矩形
rotated_rect = cv2.minAreaRect(points)
# 输出结果
print(f"中心点: {rotated_rect[0]}") # (cx, cy)
print(f"尺寸: {rotated_rect[1]}") # (width, height)
print(f"角度: {rotated_rect[2]}") # 旋转角度4. 顶点坐标计算
通过cv2.boxPoints()函数获取矩形的四个顶点坐标,顺序为:
- 左上角
- 右上角
- 右下角
- 左下角
python
# 获取顶点坐标
box = cv2.boxPoints(rotated_rect)
box = np.int0(box) # 转换为整数坐标
# 绘制矩形
image = np.zeros((100, 100, 3), dtype=np.uint8)
cv2.drawContours(image, [box], 0, (0, 255, 0), 2)5. 特殊情况处理
- 共线点:如果所有点共线,返回的矩形会退化为一条线段,高度为0
- 单点/两点:无法形成矩形,可能抛出异常或返回无效结果
- 噪声点:离群点可能影响结果,建议预处理时进行滤波
四、与其他函数的对比
| 函数 | 功能描述 | 适用场景 | 返回类型 |
|---|---|---|---|
minAreaRect |
最小面积旋转矩形 | 倾斜对象边界框 | RotatedRect |
boundingRect |
轴对齐边界框 | 快速包围盒 | Rect |
fitEllipse |
椭圆拟合 | 近似椭圆的形状 | RotatedRect |
minEnclosingCircle |
最小包围圆 | 圆形对象检测 | (center, radius) |
五、实际应用示例
1. 目标检测中的倾斜边界框
python
import cv2
import numpy as np
# 读取图像并检测轮廓
image = cv2.imread("armor_plate.jpg")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
_, thresh = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 对每个轮廓计算最小面积矩形并绘制
for contour in contours:
if len(contour) >= 5: # 确保有足够的点
rotated_rect = cv2.minAreaRect(contour)
box = cv2.boxPoints(rotated_rect)
box = np.int0(box)
cv2.drawContours(image, [box], 0, (0, 255, 0), 2)
cv2.imshow("Result", image)
cv2.waitKey(0)2. 形状方向分析
python
# 获取旋转矩形的主方向
def get_orientation(contour):
rotated_rect = cv2.minAreaRect(contour)
angle = rotated_rect[2]
# 将角度转换为0-180度范围
if rotated_rect[1][0] < rotated_rect[1][1]: # 如果宽小于高
angle = angle + 90
return angle
# 示例使用
orientation = get_orientation(contour)
print(f"物体主方向角度: {orientation} 度")3. 图像校正
python
# 校正倾斜的文档
def correct_skew(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150)
# 检测轮廓并找到最大轮廓
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if not contours:
return image
largest_contour = max(contours, key=cv2.contourArea)
rotated_rect = cv2.minAreaRect(largest_contour)
# 获取旋转矩阵并应用仿射变换
angle = rotated_rect[2]
rows, cols = image.shape[:2]
M = cv2.getRotationMatrix2D(rotated_rect[0], angle, 1)
corrected = cv2.warpAffine(image, M, (cols, rows))
return corrected六、注意事项与常见误区
-
角度的解释:
- 返回的角度范围是(-90°, 0°],但实际应用中可能需要转换为更直观的角度(如0-180°)
- 角度是相对于矩形的长边,而非短边
-
宽高的不确定性:
- OpenCV会自动调整宽高,确保
width ≥ height - 如果需要保持原始对象的宽高对应关系,可能需要额外处理
- OpenCV会自动调整宽高,确保
-
浮点精度问题:
minAreaRect返回浮点坐标,绘制时需转换为整数- 使用
np.int0()而非np.int32()可避免某些精度问题
-
性能考虑:
- 对于大量点集,可先进行降采样或轮廓近似(如
approxPolyDP) - 实时应用中可考虑缓存结果或优化算法
- 对于大量点集,可先进行降采样或轮廓近似(如
七、数学原理补充
1. 旋转卡壳算法详解
旋转卡壳算法通过以下步骤找到最小面积外接矩形:
- 计算点集的凸包
- 初始化两对顶点:底边的两个端点和对应的最高点、最低点
- 旋转卡壳,依次以凸包的每条边为底边
- 对每条底边,找到最高点和最低点,计算当前矩形面积
- 记录最小面积的矩形参数
2. 顶点坐标推导
给定旋转矩形的中心点(cx, cy)、宽w、高h和角度θ,四个顶点坐标可通过以下公式计算:
θ_rad = θ * π / 180 # 转换为弧度
# 四个顶点相对于中心点的偏移量
dx1 = (w/2) * cos(θ_rad) - (h/2) * sin(θ_rad)
dy1 = (w/2) * sin(θ_rad) + (h/2) * cos(θ_rad)
dx2 = (w/2) * cos(θ_rad) + (h/2) * sin(θ_rad)
dy2 = (w/2) * sin(θ_rad) - (h/2) * cos(θ_rad)
# 四个顶点的绝对坐标
pt1 = (cx + dx1, cy + dy1) # 左上角
pt2 = (cx + dx2, cy + dy2) # 右上角
pt3 = (cx - dx1, cy - dy1) # 右下角
pt4 = (cx - dx2, cy - dy2) # 左下角八、跨语言差异
| 特性 | C++ | Python |
|---|---|---|
| 输入类型 | vector<Point> |
numpy.ndarray (float32) |
| 返回类型 | RotatedRect 对象 |
元组 ((cx, cy), (w, h), angle) |
| 顶点获取 | rRect.points(vertices) |
cv2.boxPoints(rRect) |
| 坐标精度 | 浮点型 | 浮点型(需手动转换为整数) |
九、性能优化建议
-
预处理点集:
- 使用
approxPolyDP进行轮廓近似,减少点的数量 - 过滤离群点,避免干扰结果
- 使用
-
缓存计算结果:
- 对于静态或变化缓慢的场景,避免重复计算相同点集的最小矩形
-
并行处理:
- 对于多目标场景,可并行计算每个目标的最小矩形
-
算法选择:
- 对于近似矩形的形状,可先使用轮廓分析筛选,再应用
minAreaRect
- 对于近似矩形的形状,可先使用轮廓分析筛选,再应用
区分boundingRect、minEnclosingCircle
在OpenCV中,boundingRect、minAreaRect和minEnclosingCircle是三个常用的轮廓处理函数,它们的作用和适用场景各有不同:
-
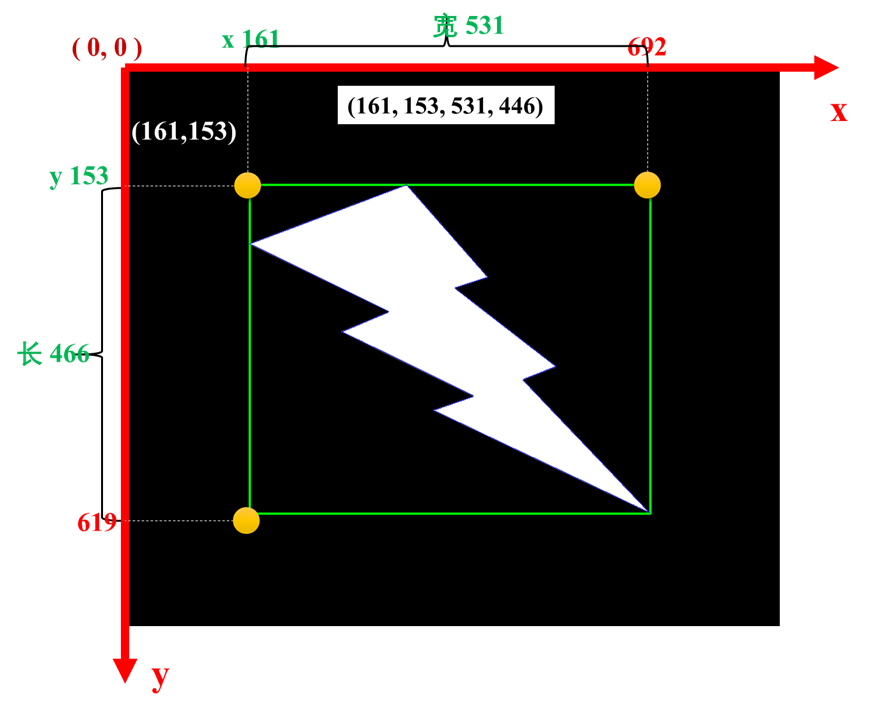
boundingRect
- 功能:计算轮廓的垂直外接矩形。
- 特点:矩形的边与图像坐标轴平行,不考虑轮廓的旋转角度,因此可能不是面积最小的外接矩形。
- 返回值 :返回一个包含矩形左上角坐标(x,y)和宽高(w,h)的Rect对象。
-
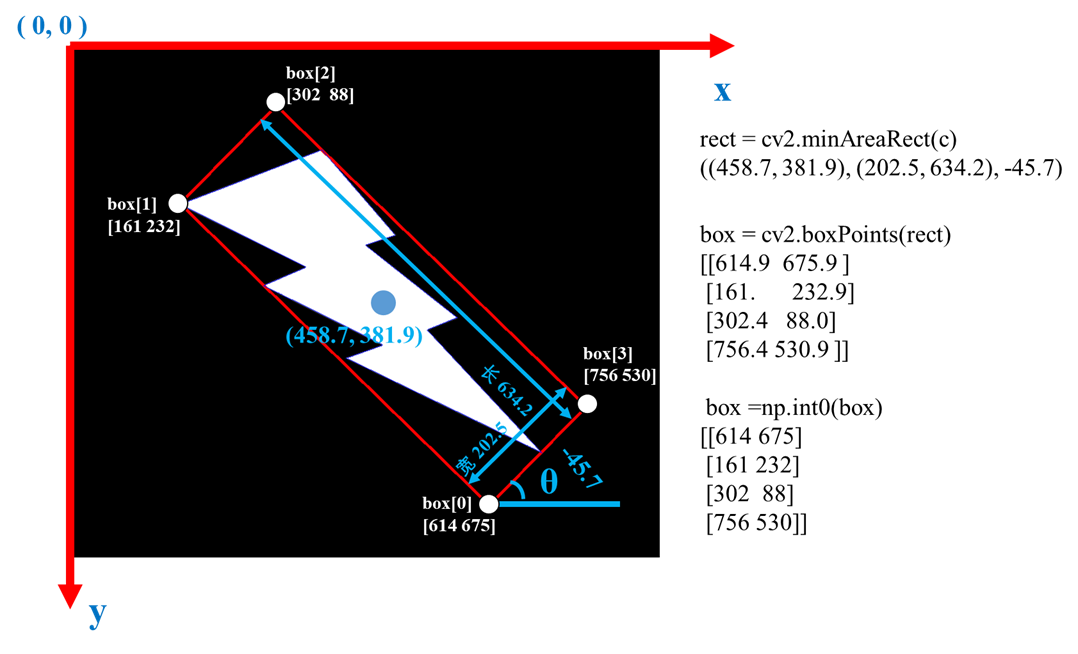
minAreaRect
- 功能:计算轮廓的最小面积外接矩形。
- 特点:考虑了轮廓的旋转角度,因此可能是倾斜的矩形,其面积通常小于等于boundingRect的结果。
- 返回值 :返回一个RotatedRect对象,包含矩形中心点坐标、宽高和旋转角度。
-
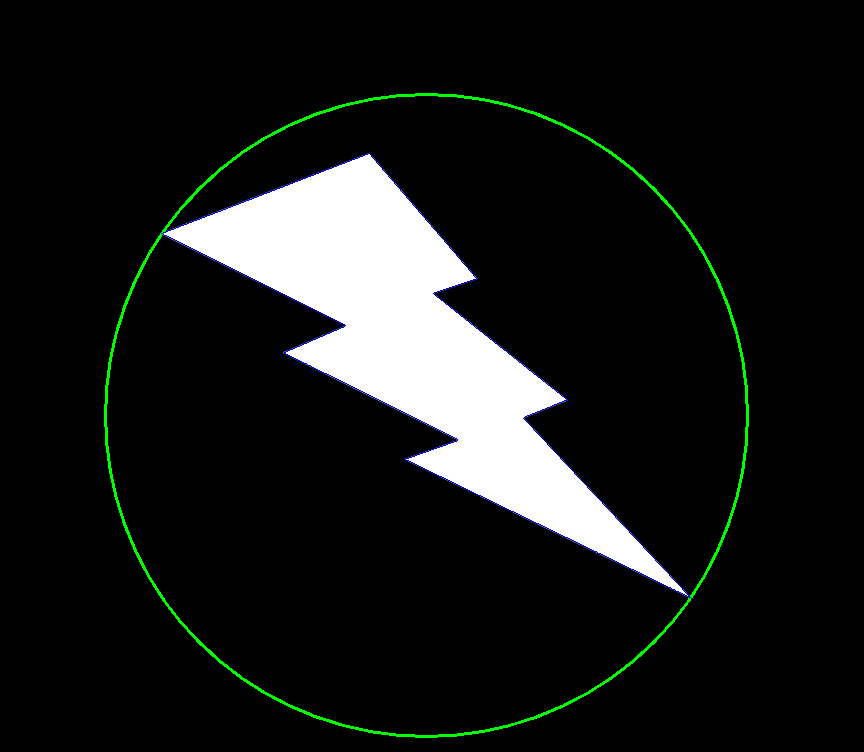
minEnclosingCircle
- 功能:计算能够完全包围轮廓的最小圆。
- 特点:基于最小二乘法拟合,返回的圆不一定经过所有轮廓点,但能保证最小化圆的半径。
- 返回值 :返回圆心坐标和圆半径。
应用场景对比:
- boundingRect:适用于对方向不敏感的场景,如粗略定位目标。
- minAreaRect:适用于需要考虑目标真实方向的场景,如物体姿态估计、OCR文本检测等。
- minEnclosingCircle:适用于分析圆形或近似圆形目标,如检测球类、硬币等。