1. 概述
2025年,苏黎世研究团队在RSS2025会议上正式提出「LLM-MPC混合架构」,标志着大语言模型(LLM)在自动驾驶系统中的实用化迈出关键一步。该方案旨在解决传统深度学习模型在极端交通场景中泛化能力不足的问题。通过在车载终端边缘部署LLM,并融合模型预测控制(MPC)技术,系统在保持实时性与安全性的同时,推理速度提升10.5倍,为复杂环境中的高鲁棒决策提供全新范式。
2. 核心技术:边缘部署与混合控制架构
2.1 双模块协同框架
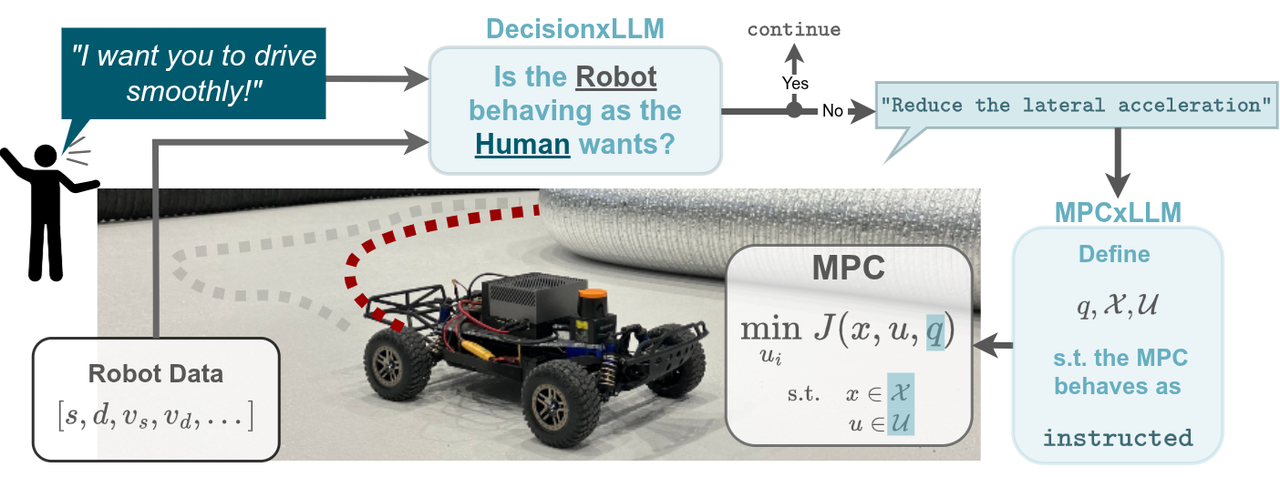
- DecisionxLLM(决策模块):
- 分析车载传感器数据(如位置、速度、与障碍物距离),基于自然语言指令(如 "平稳驾驶")判断当前行为是否符合预期。
- 引入检索增强生成(RAG),结合机器人特定知识(如安全速度范围、车道边界阈值)增强推理准确性,避免纯文本 LLM 的泛化不足。
- MPCxLLM(控制模块):
- 基于模型预测控制(MPC)的底层控制器,接收 LLM 指令动态调整成本函数参数(如横向加速度权重、速度约束)。
- 通过低秩适应(LoRA)微调,使 LLM 学习如何将自然语言映射至 MPC 参数(如 "远离墙壁" 对应增大横向偏差权重qn),平衡控制灵活性与安全性。
2.2 边缘部署优化技术
- 模型压缩:
- 量化(Quantization):将 LLM 参数从 FP16 压缩至 Q5_k_m 格式,显存占用减少 40% 以上,推理速度提升 10.5 倍(如 Qwen2.5-7b 在 Jetson Orin 上从 30.48 秒 / 次降至 5.52 秒 / 次)。
- 轻量化模型选择:采用 Qwen2.5-7b(70 亿参数)和 Phi3-mini(38 亿参数)替代云端 GPT4o,在保持 82% 以上决策精度的同时,实现本地实时运行。
- 计算资源调度:
- 使用 Jetson Orin AGX 作为车载计算单元,GPU 负责 LLM 推理,CPU 处理 MPC 控制逻辑,通过 ROS 动态参数调整实现模块解耦,避免 LLM 推理延迟影响控制频率(MPC 保持 20Hz 实时控制)
3. 技术优势
- 混合架构优势:LLM 负责高层语义理解(如解析 "平稳驾驶" 为降低加速度波动),MPC 确保底层控制的安全性与实时性,避免纯学习模型的不可解释性风险。
- 数据高效性:通过 GPT4o 生成合成数据微调本地 LLM,仅需少量真实场景数据即可适应新指令(如 "雨天谨慎驾驶"),降低标注成本。
- 边缘部署范式:提出 "量化 + LoRA+RAG" 组合方案,使 70 亿参数模型在边缘设备实现实时推理,突破传统云依赖架构的隐私与可靠性瓶颈。
4. 未来方向
- 多模态 LLM 集成:
融合视觉特征(如 BEV 感知结果)与语言指令,提升场景理解的丰富性,例如通过图像识别动态障碍物并生成避障策略。 - 动态参数优化:
引入在线学习机制,根据实时控制误差动态调整 LLM 推理策略,减少多轮交互延迟。 - 轻量化模型架构:
探索参数高效微调(PEFT)的更优变体(如 IA³、QLoRA),进一步压缩模型体积至 10 亿参数级,适配更低算力设备(如 Jetson Nano)。 - 安全认证体系:
建立 LLM 决策的形式化验证流程,通过形式化方法证明参数调整的安全性边界,满足 ISO 26262 等车载功能安全标准。
5. 商业前景与商用性分析
| 商用维度 | 说明 |
|---|---|
| 行业适配性 | 适用于高级自动驾驶(L3-L5)、特种车辆(矿卡、港口运输)等应用场景 |
| 隐私合规性 | 数据完全本地处理,规避GDPR等隐私合规障碍 |
| 成本可控性 | 量化+微调技术减少对算力依赖,成本低于云部署10倍 |
| 部署灵活性 | 可广泛部署于中低端嵌入式平台,适配多种操作系统与车载控制平台 |
| 投资价值 | LLM 具身智能控制市场潜力大,有望成为未来十年智能驾驶领域核心技术支撑 |
6. 结论
论文提出的车载 LLM 边缘部署方案,通过混合架构与模型压缩技术,首次实现了大模型在自动驾驶场景的实时知识推理与控制适配。实验表明,该方案在决策准确率(+10.45%)、控制适应性(+52.2%)和边缘计算效率(+10.5 倍)上均取得显著提升,为解决自动驾驶边缘场景的长尾问题提供了新路径。未来结合多模态感知与更高效的模型优化技术,有望推动具身智能在复杂交通环境中的规模化应用。