前言

题解
2022 RoboCom 世界机器人开发者大赛-本科组(省赛)。
感觉T5是最简单的,其他都不好做。
RC-u5 树与二分图
分值: 30分
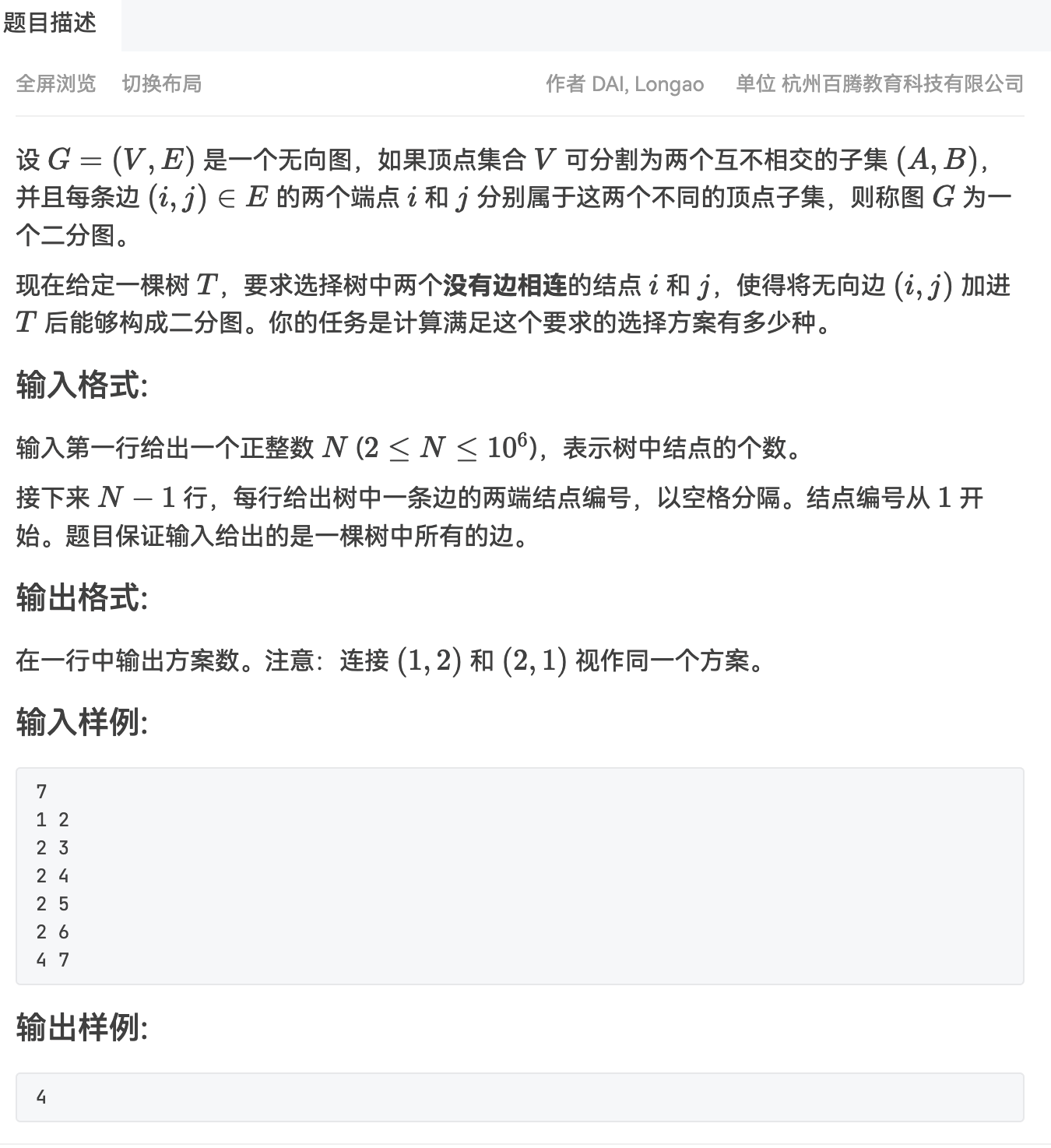
思路: 容斥原理
树天然就是二分图,按深度d归类(偶数深度为S1,奇数深度为S2),如果新增边,还是二分图,说明
新增边 ( u , v ) , u ∈ S 1 , v ∈ S 2 新增边(u, v), u\in S1, v\in S2 新增边(u,v),u∈S1,v∈S2
只要能梳理出这个性质,那这题就非常的容易。
由容斥得
∣ S 1 ∣ ∗ ∣ S 2 ∣ − ( n − 1 ) |S1| * |S2| - (n - 1) ∣S1∣∗∣S2∣−(n−1)
n 为树的节点, n − 1 为树的边数 n 为树的节点, n-1为树的边数 n为树的节点,n−1为树的边数
S1和S2通过DFS或者bfs层序遍历即可
cpp
#include <bits/stdc++.h>
using namespace std;
int color[2] = {0};
void dfs(vector<vector<int>>&g, vector<int>&color, int u, int fa, int c) {
color[c]++;
for (int v: g[u]) {
if (v == fa) continue;
dfs(g, color, v, u, 1 - c);
}
}
int main() {
int n;
cin >> n;
vector<vector<int>> g(n);
vector<int> color(n);
for (int i = 0; i < n - 1; i++) {
int u, v;
cin >> u>> v;
u--; v--;
g[u].push_back(v);
g[v].push_back(u);
}
dfs(g, color, 0, -1, 0);
int64_t p = (int64_t)color[0] * color[1];
cout << (p-(n - 1)) << "\n";
return 0;
}写在最后
