1 分布类型:
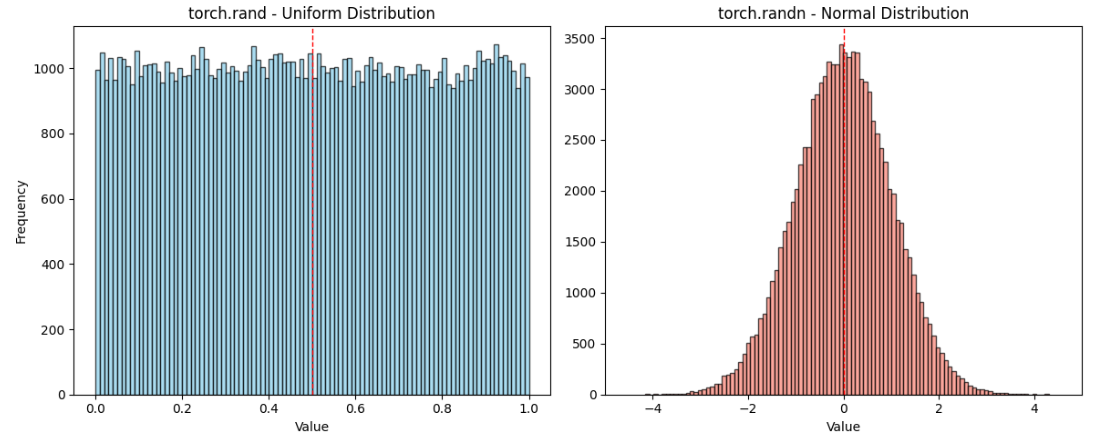
randn:生成标准正态分布(均值 0,标准差 1)
rand:生成 [0, 1) 区间的均匀分布
2 数值范围:
randn:可能产生负数(范围 (-∞, +∞))
rand:只产生非负数(范围 [0, 1))
3 典型应用:
python
# 生成正态分布数据(适合模拟噪声/自然现象)
noise = torch.randn(100) # 包含正负数
# 生成均匀分布数据(适合概率/颜色通道值等)
probabilities = torch.rand(100) # 全在 0-1 之间