一、功能价值动态模型:基于自动驾驶等级的权重迁移
plaintext
功能演变四阶段:
█ 辅助阶段(L2):单功能补足 →
█ 拓展阶段(L2+ NOA):多模态增强 →
█ 融合阶段(L3):系统安全基座 →
█ 重构阶段(L4):云端协同范式二、核心功能演变深度解析
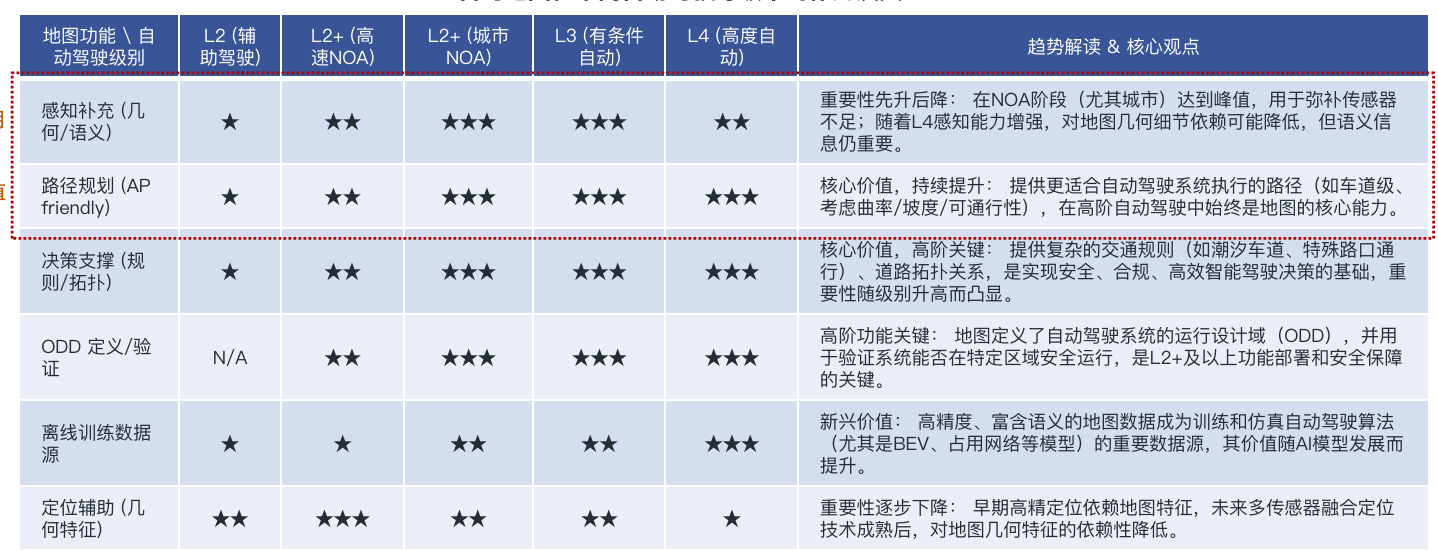
| 功能模块 | L2级辅助驾驶 | L3级有条件自动 | L4级高度自动 | 技术驱动因素 | 产业案例 |
|---|---|---|---|---|---|
| 感知补充 | 几何数据★ | 语义数据★★★ | 动态语义★★ | BEV+Transformer感知模型崛起 | Tesla Occupancy Network |
| 路径规划(AP友好) | 基础路网★ | 车道级拓扑★★★ | 实时通行性★★★ | 高精车道属性映射+交通流预测 | 华为ADS 2.0道路博弈算法 |
| 决策支撑 | 简单规则★ | 复杂规则★★★ | 全局决策★★★ | 数字孪生路权模型(Road Authority) | Mobileye路书(RSS)系统 |
| ODD定义/验证 | N/A | 空间域★★★ | 时空域★★★ | ISO 34503安全验证框架 | 奔驰DRIVE PILOT L3认证 |
| 离线训练数据 | 低价值★ | 中价值★★ | 高价值★★★ | NeRF+隐式地图生成技术 | Waymo SimNet仿真平台 |
| 定位辅助 | 强依赖★★ | 中等依赖★★ | 弱依赖★ | 视觉-激光雷达-惯导紧耦合 | 小鹏XNGP无图城市导航 |
核心演变规律 :
地图正经历从静态空间描述工具 (L2)→ 动态决策知识引擎 (L3)→ 云端协同智能体(L4)的范式转移。在L4阶段,部分功能看似权重降低,实则是技术架构的重构(如定位依赖度下降对应多传感器融合定位成熟)。
三、关键技术突破与实现原理
1. 感知补充的升降逻辑
- L2+峰值期技术原理 :
在传感器受限阶段(如毫米波雷达视角盲区),地图通过厘米级车道线曲率参数 与障碍物位置先验补偿感知短板(尤其城市复杂路口) - L4衰退本质 :
BEV鸟瞰图感知实现150m以上视野覆盖,配合Occupancy Network(占据网络)实时构建3D场景,降低对静态地图几何细节的依赖
2. 决策支撑的规则引擎化
-
L3+关键突破 :
采用路权拓扑图(RTG) 技术,将交通规则编码为机器可执行的数字逻辑:python# 路权拓扑图决策伪代码示例 def right_of_way_judgment(ego_car, map_data): if map_data.lane_type == "TURN_LANE": return check_traffic_light_binding(ego_car.position) elif map_data.intersection_rule == "ALL_WAY_STOP": return calculate_arrival_order(ego_car, nearby_vehicles) -
产业应用:宝马L3系统在德国高速路实现130km/h变道决策,依赖地图预置的237类交通规则语义标签
3. 离线训练的数据革命
- L4级核心价值重构 :
-
高精地图作为自动驾驶大模型的训练语料 :
math\mathcal{L}_{map} = \sum_{t=1}^{T} \| \text{BEV}_{pred}^{(t)} - \Phi_{HDMap}(p_t) \|^2其中 Φ H D M a p \Phi_{HDMap} ΦHDMap为地图特征编码器,为BEV感知提供监督信号
-
NeRF神经渲染地图:通过车载视频数据生成隐式地图,替代传统测绘(特斯拉2023年技术路线)
-
四、未来发展趋势:轻量化与云脑协同
-
地图形态轻量化
- 当前痛点:传统高精地图1km²数据量达GB级,更新成本超$1000/km
- 技术路径 :
- 特征地图(Feature Map) :保留关键语义节点(如路口转向逻辑),数据量降低90%
- 众源语义地图(CrowdSource HD) :通过10%装备率车队实现分钟级更新(如Momenta方案)
-
云-端协同架构演进
实时感知流 动态地图层 蒸馏知识模型 OTA分发 车端 边缘云 中心云 轻量地图
技术价值 :L4阶段地图核心定位转变为全域交通调度知识中枢,实现:
- 基于百万车辆的宏观流预测
- 紧急事件跨车同步(如事故点10秒内全域预警)
结语:从工具到智能体的价值跃迁
智驾地图在不同自动驾驶等级中呈现动态能力迁移 :在L2-L3阶段承担感知增强与规则载体的重任(功能峰值),而在L4阶段则演变为云端智能交通的神经元。技术本质上是从"精确空间数据库"向"动态规则引擎+AI训练基础设施"的双重跃迁。据波士顿咨询预测,2028年70%的L4系统将采用轻量地图+云端增强方案,标志着地图作为独立产品的时代终结,正式融入自动驾驶全栈智能网络。
数据印证:"离线训练数据源"在L4级达★★★(核心价值),印证技术方向已转向数据驱动的AI协同范式
附图: