主要内容:系统状态机,系统时基,系统需求分析,系统构建,系统状态流图
一、题目要求
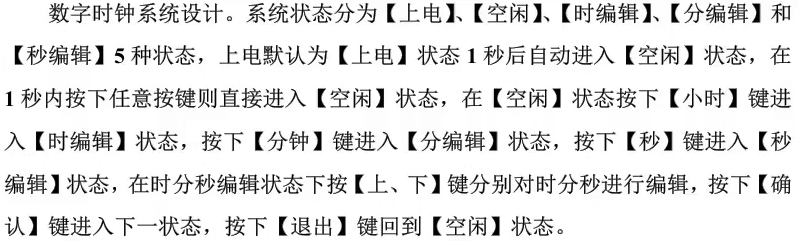
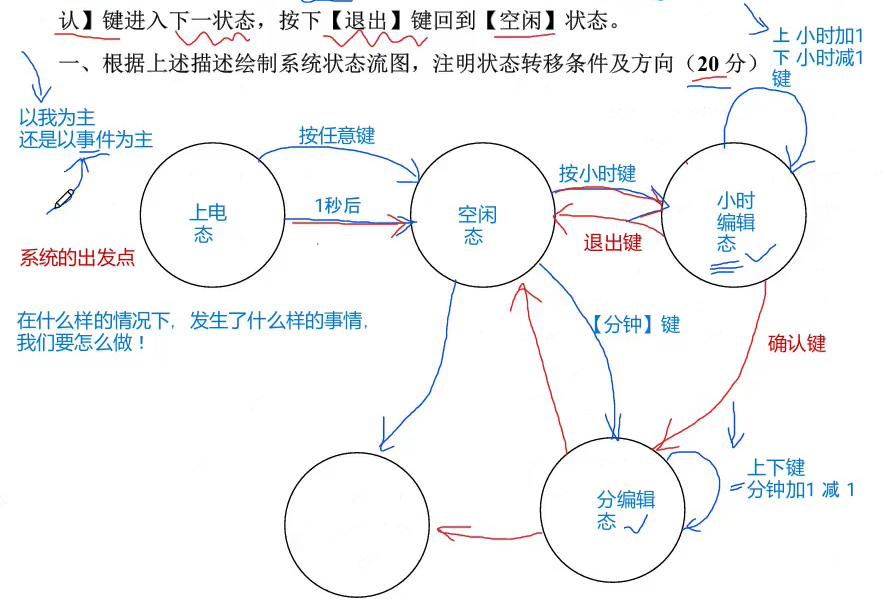
二、绘制系统状态流图
题目:根据上述描述绘制系统状态流图,注明状态转移条件及方向。
三、利用定时器产生时基
题目:由Timer1定时器中断产生1ms时基,在1ms时基基础上产生10ms,100ms,500ms和1s的时基。
1.编写Timer1的中断服务程序
(要仔细看清题目要求是用 Timer0 还是 Timer1 )
2.编写系统时基实现程序
四、定义系统的状态变量
系统状态字不同,代表系统处于不同的状态。不要轻易浪费资源。
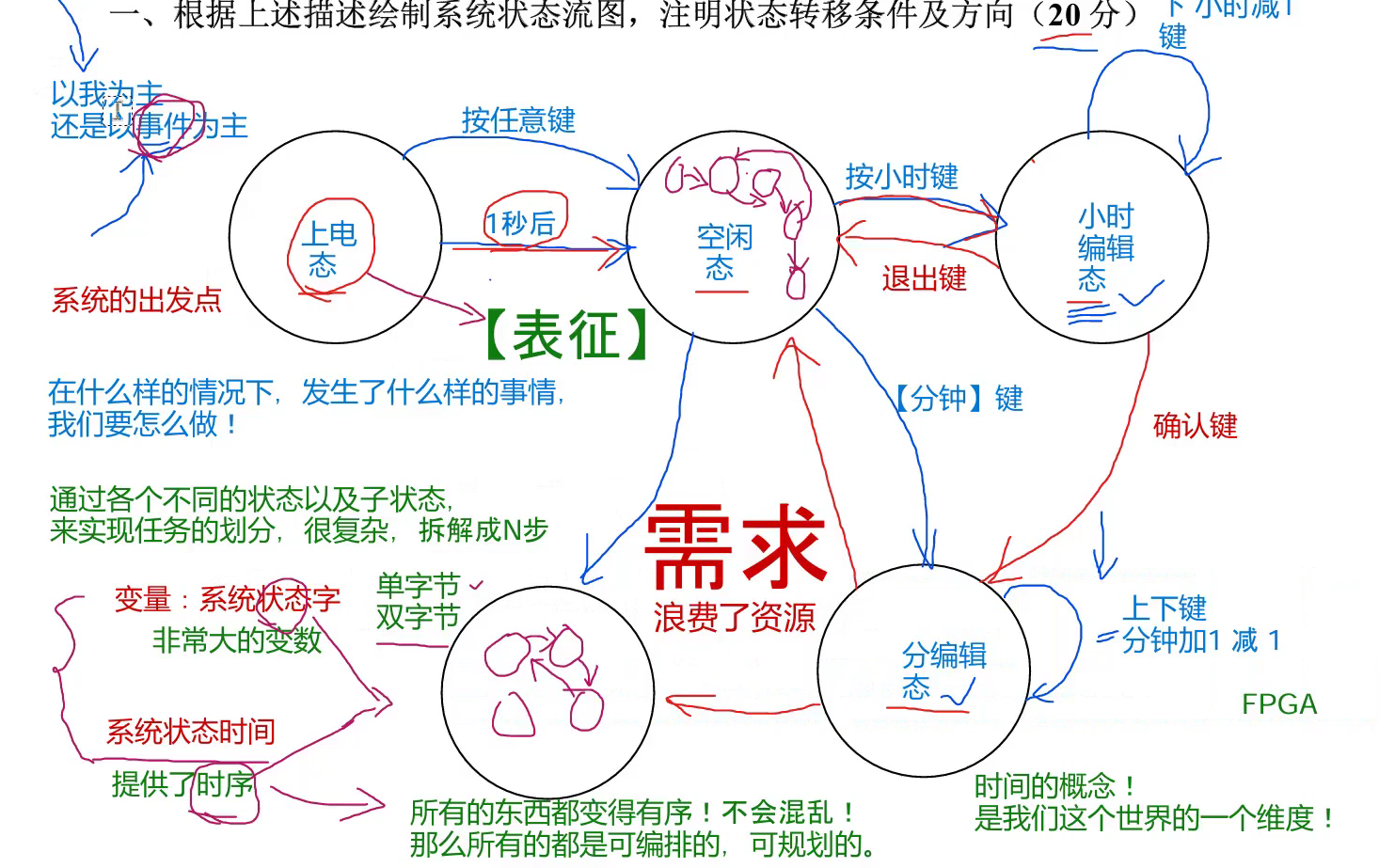
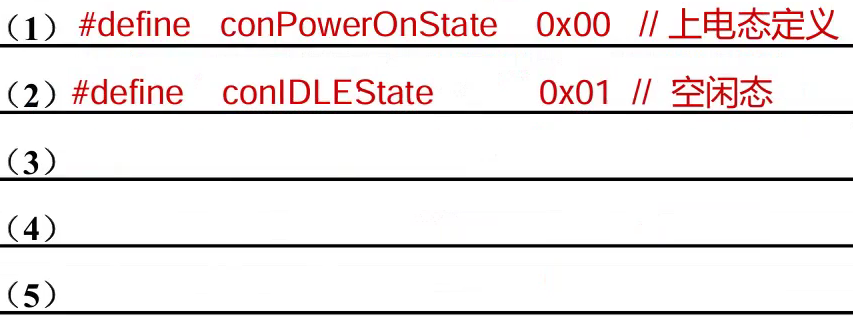
题目:根据上述描述定义系统的状态变量,状态时间变了、各种状态变量、按键变量以及按键功能敞亮定义,例#define xx_State 0x01
1.系统状态变量声明

2.状态时间变量声明

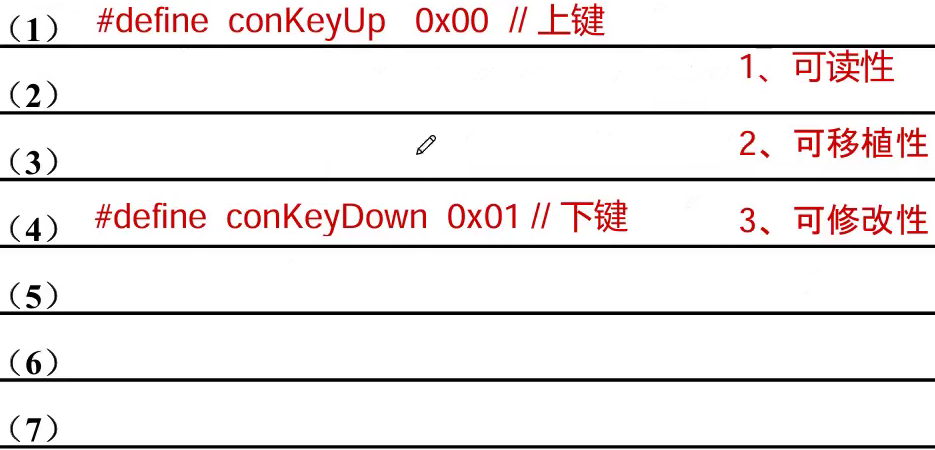
3.系统状态常量定义
(实际考察对于宏定义的理解以及应用)
4.按键相关变量定义
5.按键常量定义
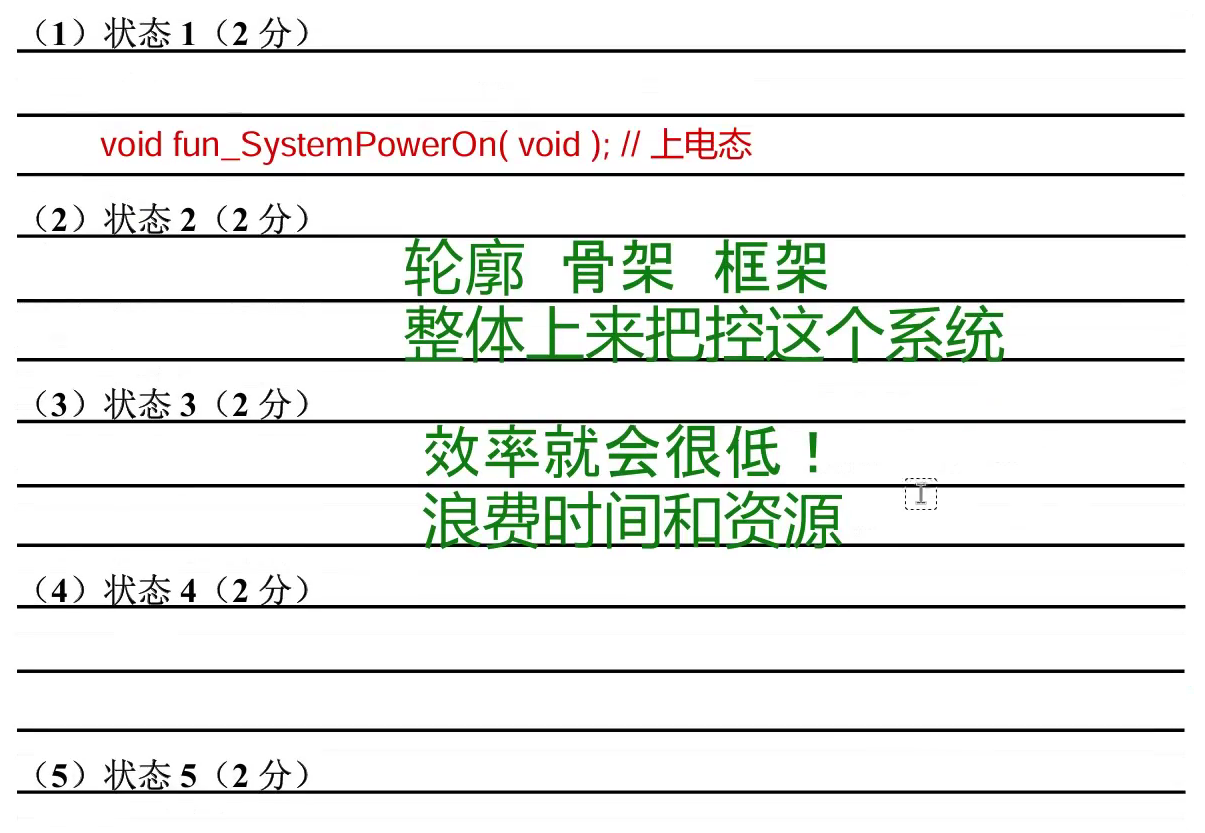
五、定义各个状态函数
题目:定义各个状态函数,例void Fun_xxState(void){}//xx状态函数,函数声明需完整,注释清楚,函数具体实现内容不需要编写,根据自己定义的函数编写系统状态机控制函数Fun_SysState
六、编写系统【空闲】状态函数
题目:编写完整的系统【空闲】状态函数,添加注释
七、编写系统【分编辑】状态函数
题目:编写完整的系统【分编辑】状态函数,添加注释
八、部分示例代码
1.主程序
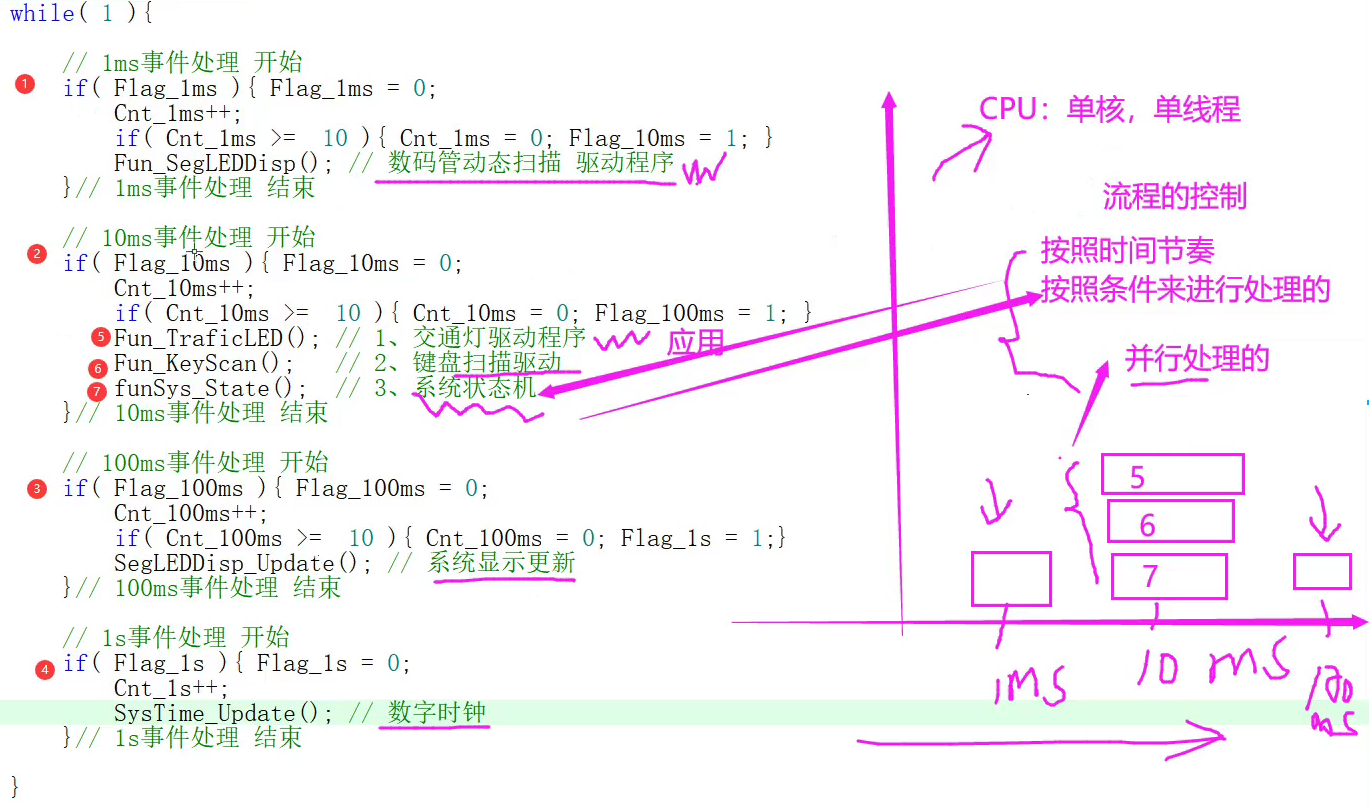
2.系统状态机
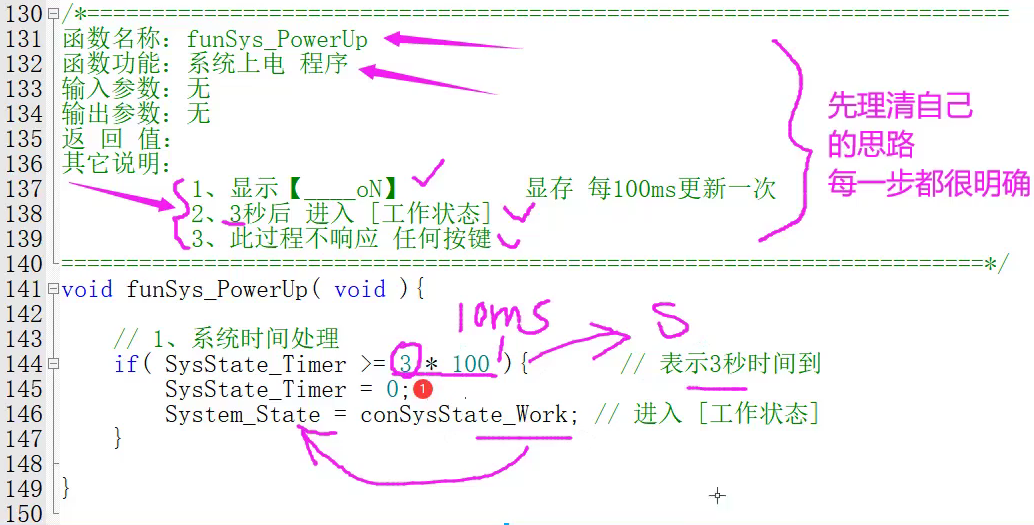
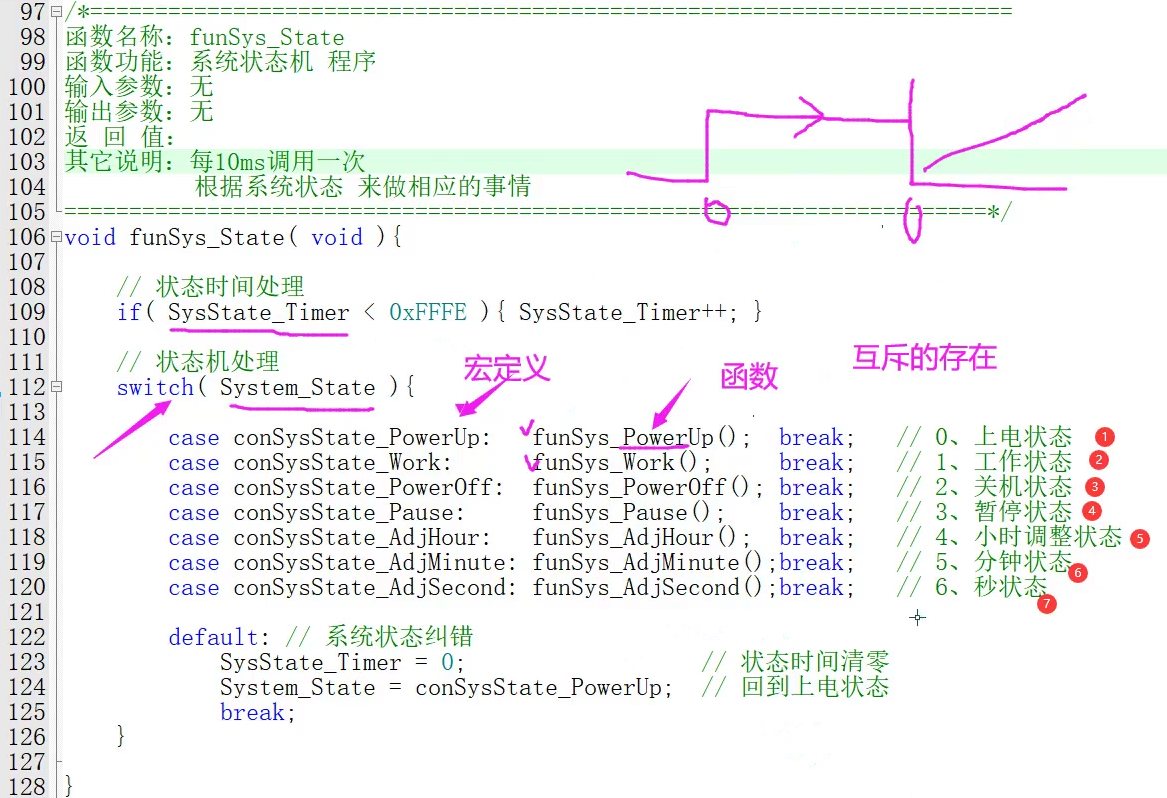 3.系统上电程序
3.系统上电程序
(系统状态每10ms调用一次 → 3s = 3 * 100)
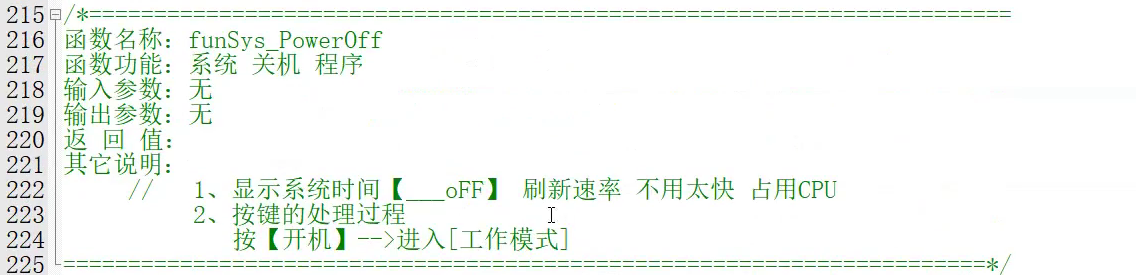
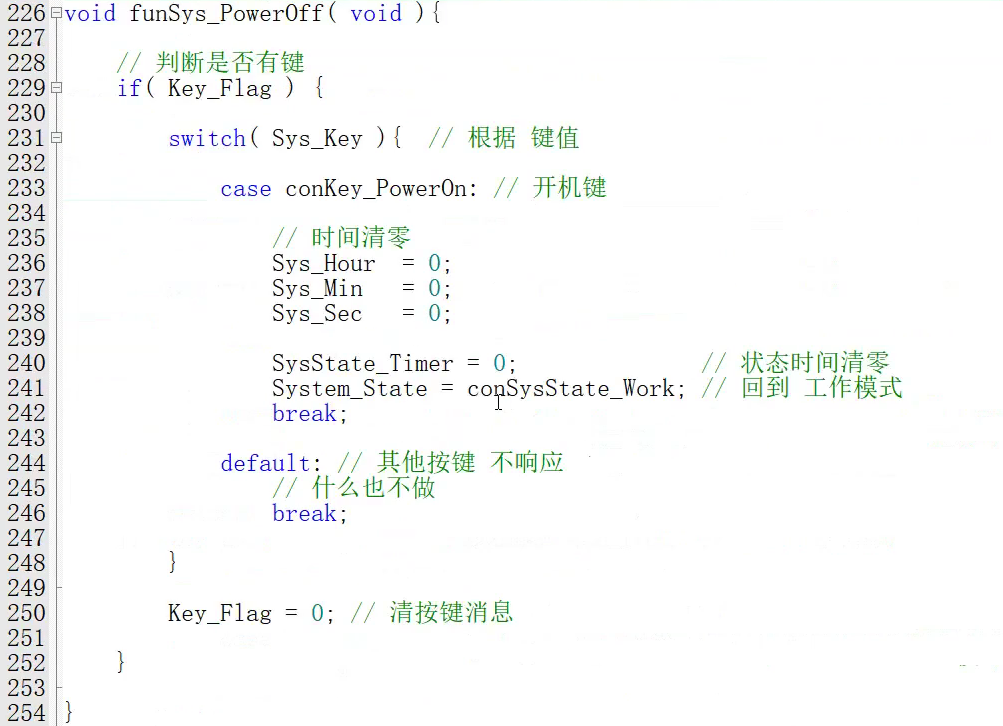
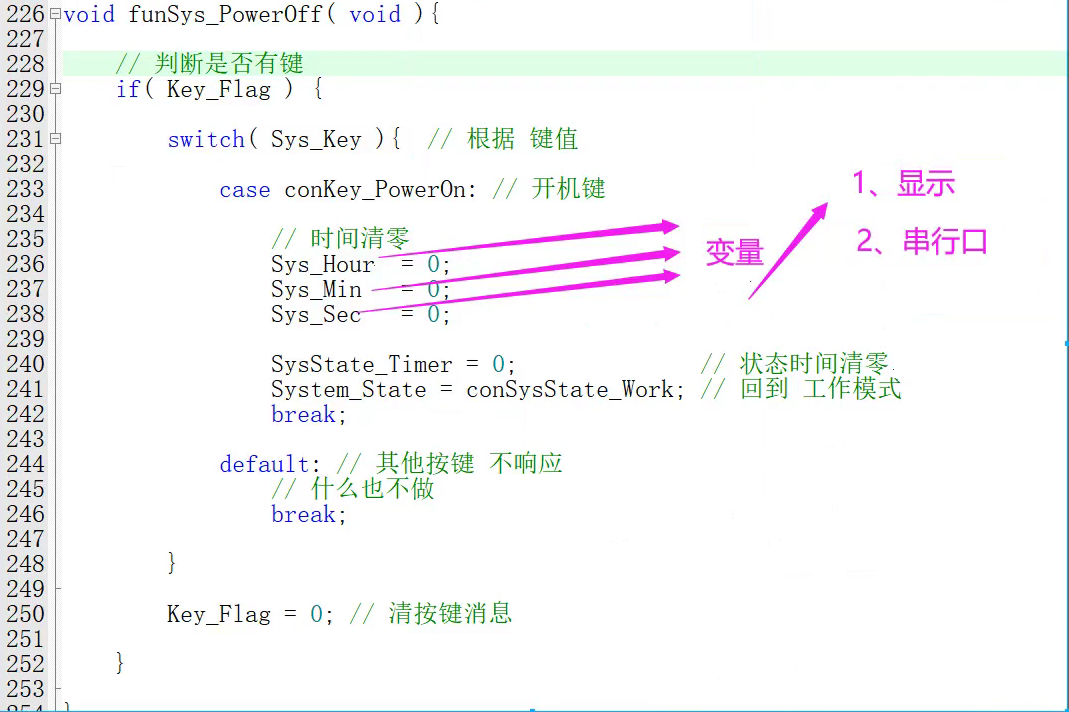
4.系统关机程序
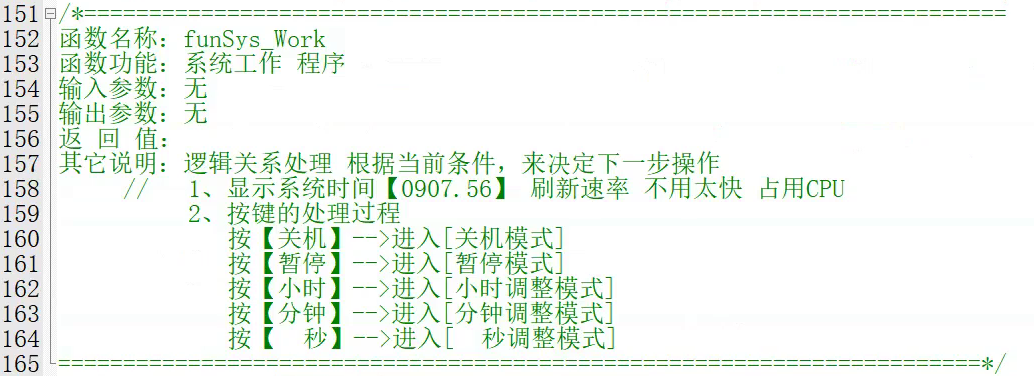
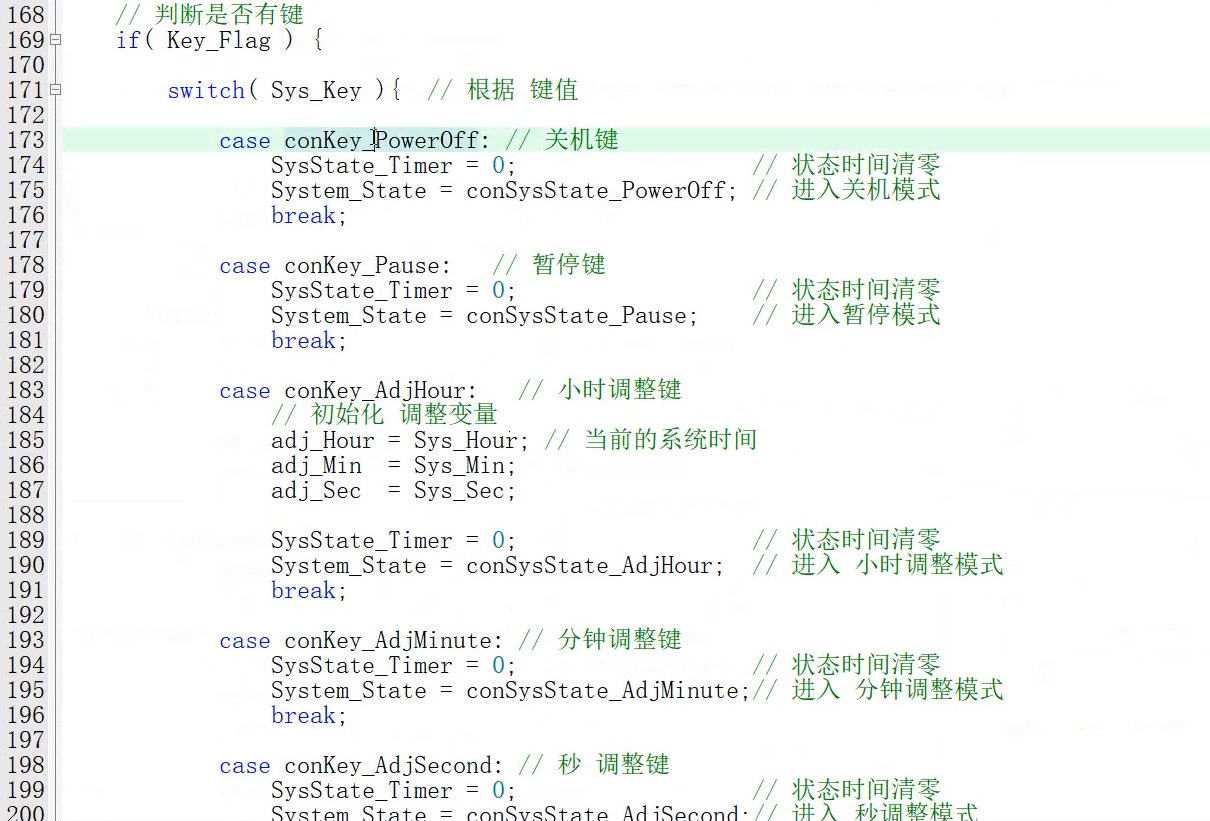
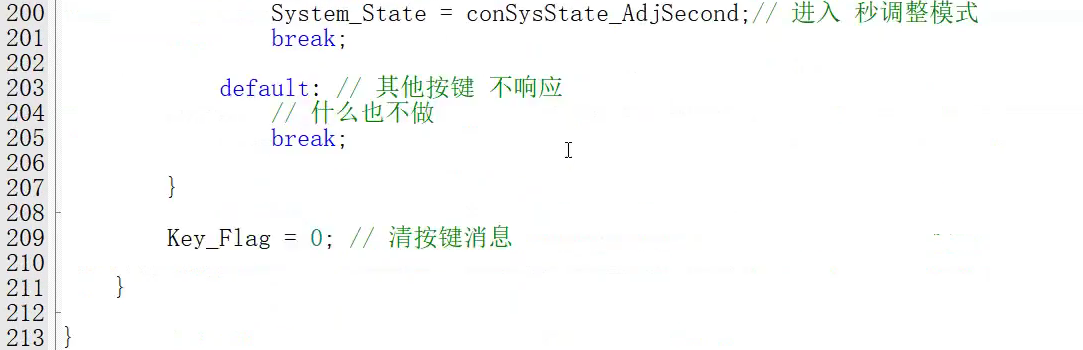
5.系统工作程序
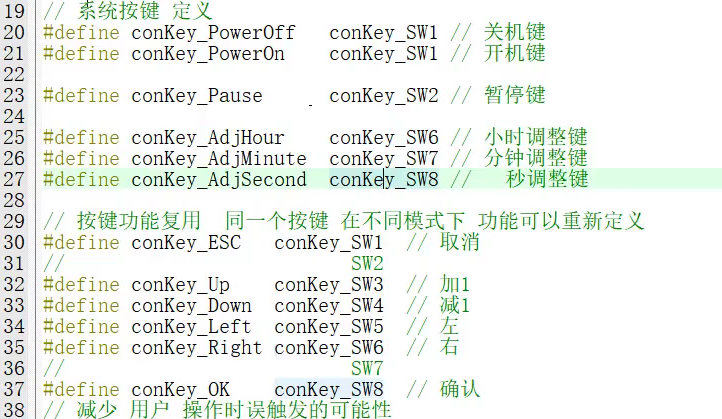
按键宏定义
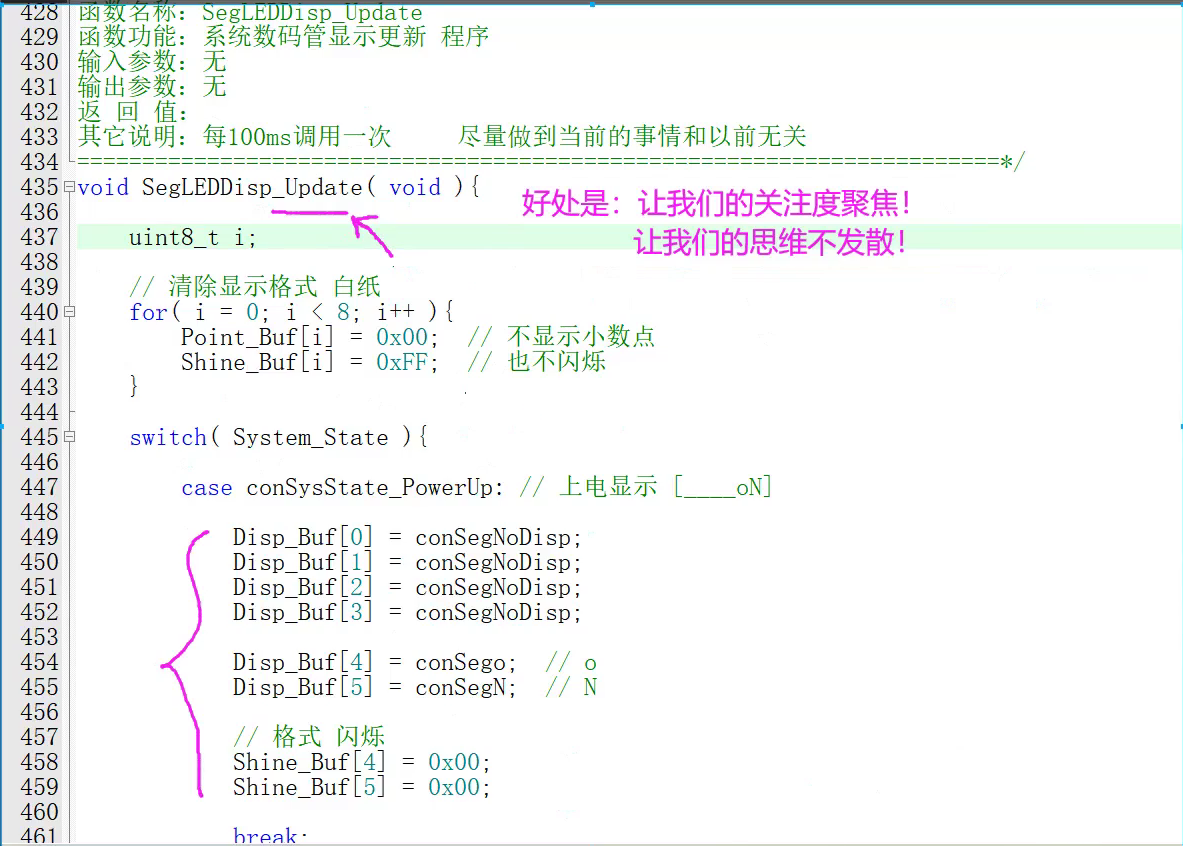
6.系统显示函数
7.系统暂停程序
这些函数中全都是对系统变量的操作,而系统的变量以什么样的形式去显示是在其他环节完成的,例如通过串行口发送出去。
8.串行口初始化
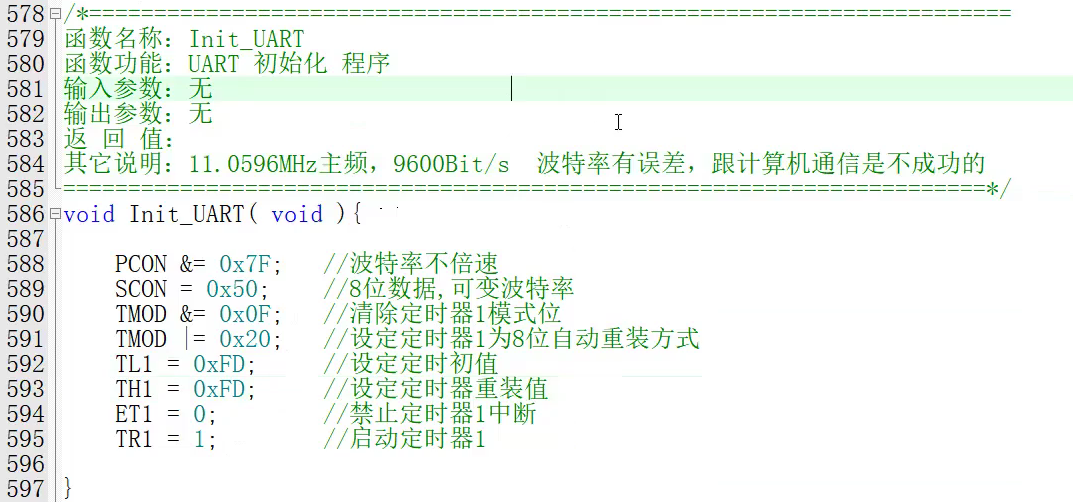
【注意】在proteus中做仿真时,需要将51单片机的时钟频率改为11.0596MHz才能跟计算机通信,否则计算出的波特率有误差,无法实现与计算机的通信。