注意事项
我们把注意事项放到最前面,避免在组装的过程中出现问题
- 此为3D打印产品,使用时避免用力过大导致我们的结构断裂
- 关机的情况下,如欲转动龙头及尾舵,请力道放轻转动,以免舵机(伺服马达)内的齿轮断裂。龙舟启动后,如左右、两侧划奖运转不顺,可尝试将人身板关节处的次旋转轴的螺丝转松一些
- 龙舟于电源开启时,严禁强行用手扳动舵机关节处造成舵机(伺服马达)损坏
- 龙舟适用行动电源供电(MicroUSB接头),行动电源的重量请自行斟酌过重会导致进水沉船。
- 龙舟下水活动时,请做好防水措施,龙舟吃水深度建议低于主、次旋转轴位置,以免自锁螺丝处进水。
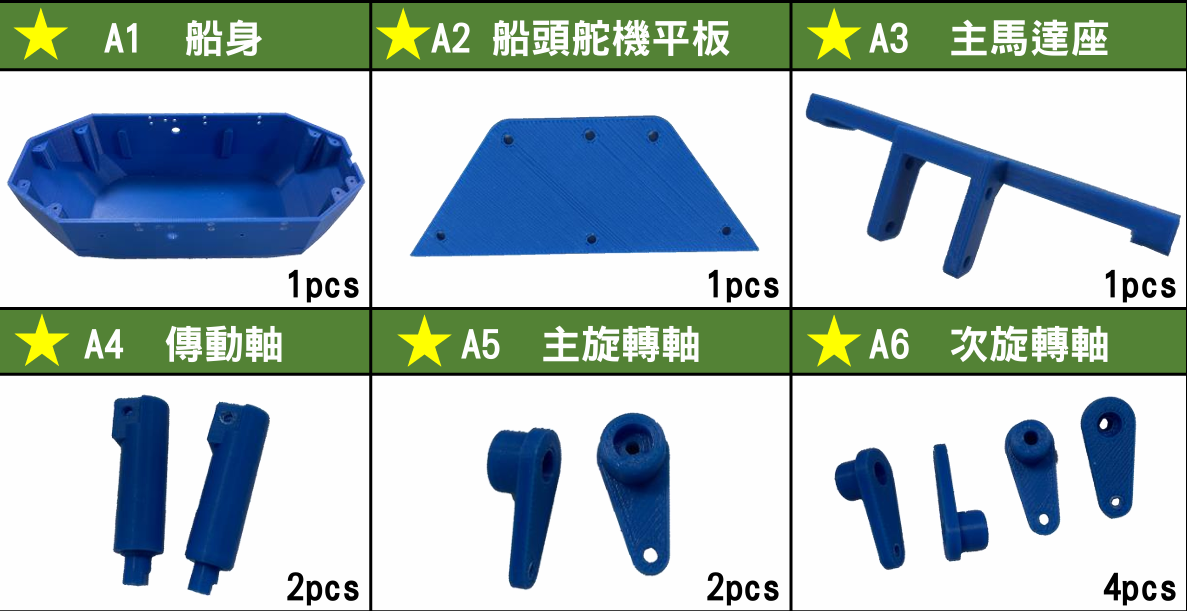
手工组件及组件材料
-
手工具认识

-
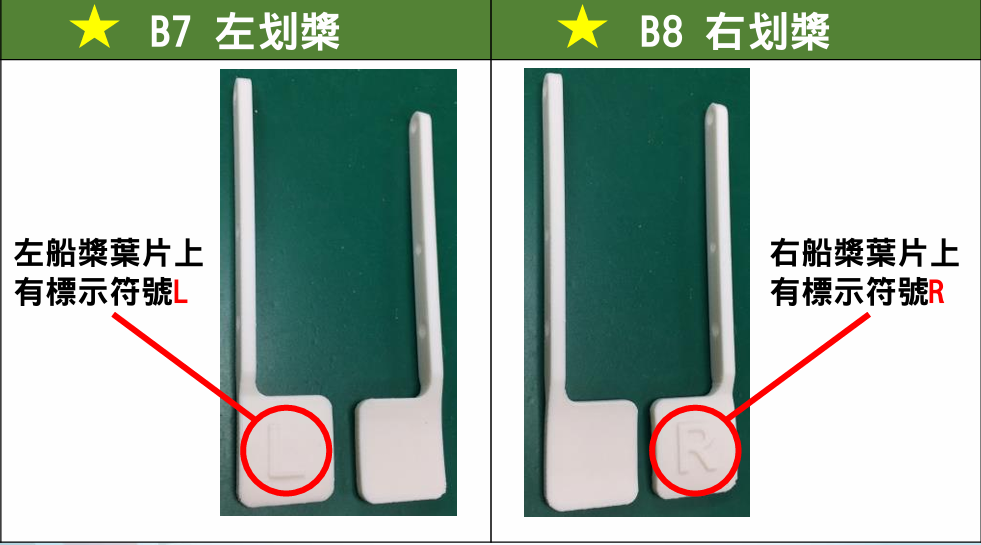
龙舟组件认识


-
人形组件认识

-
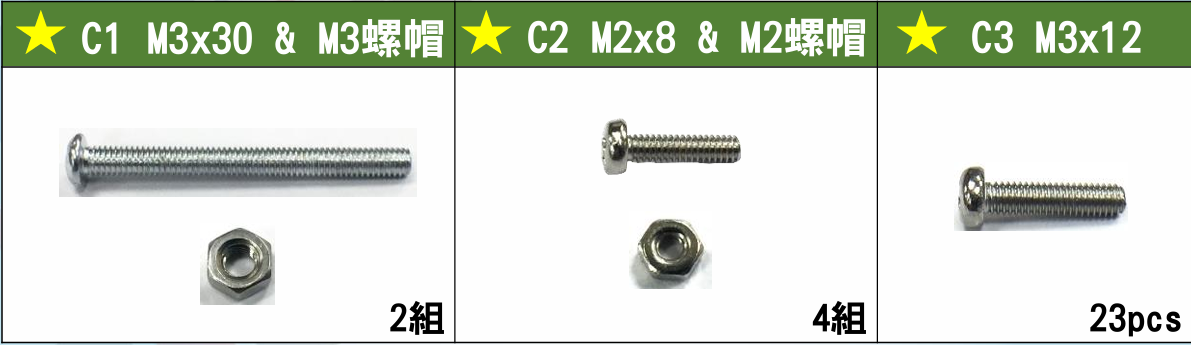
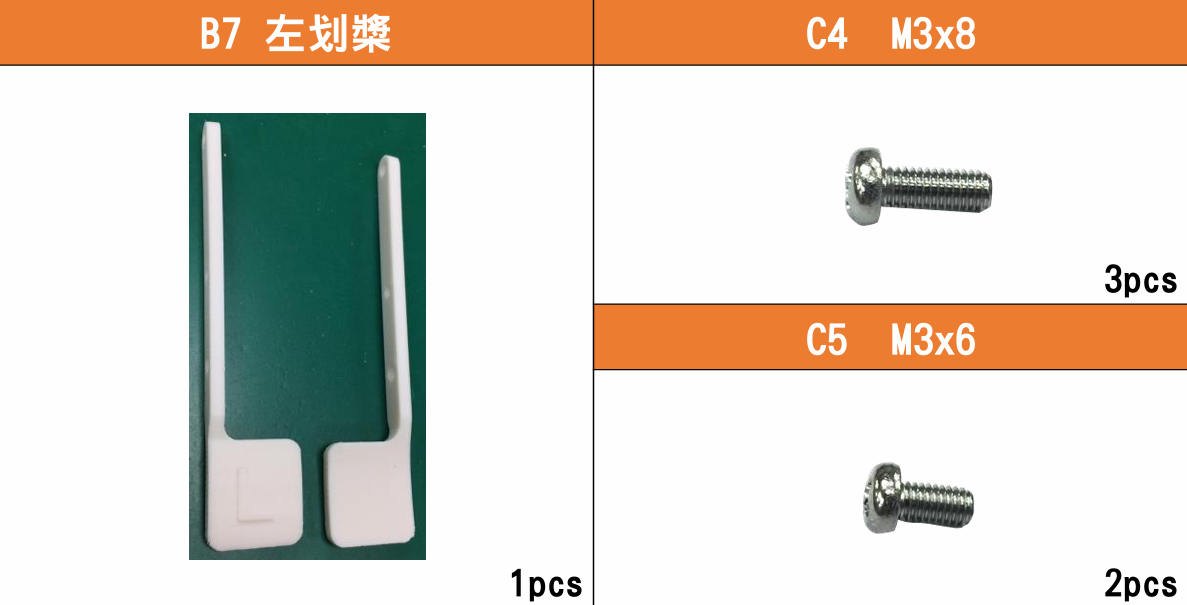
螺丝辨认


-
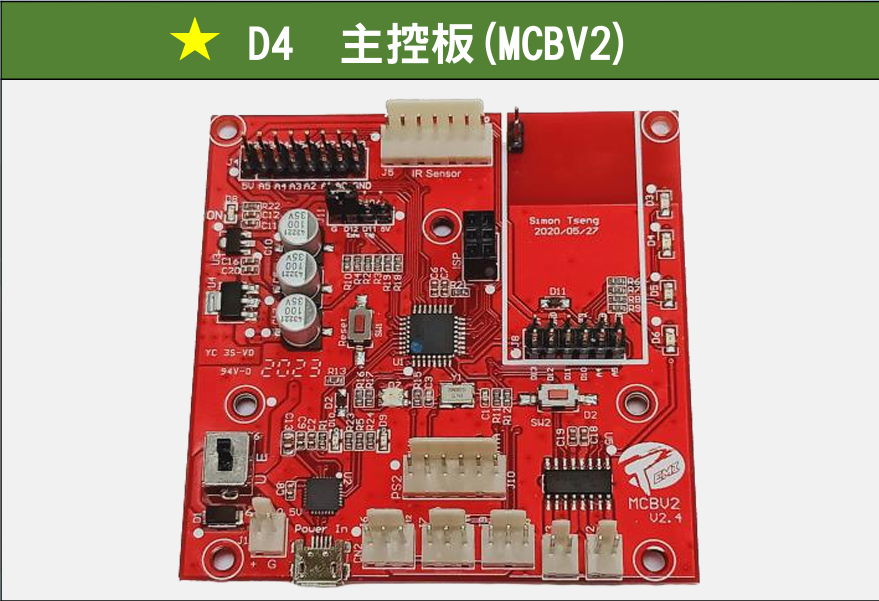
其他配件介绍

以上是我们龙舟组装所需要的部件,我们通过以上的部件对龙舟进行组装
船身组装
-
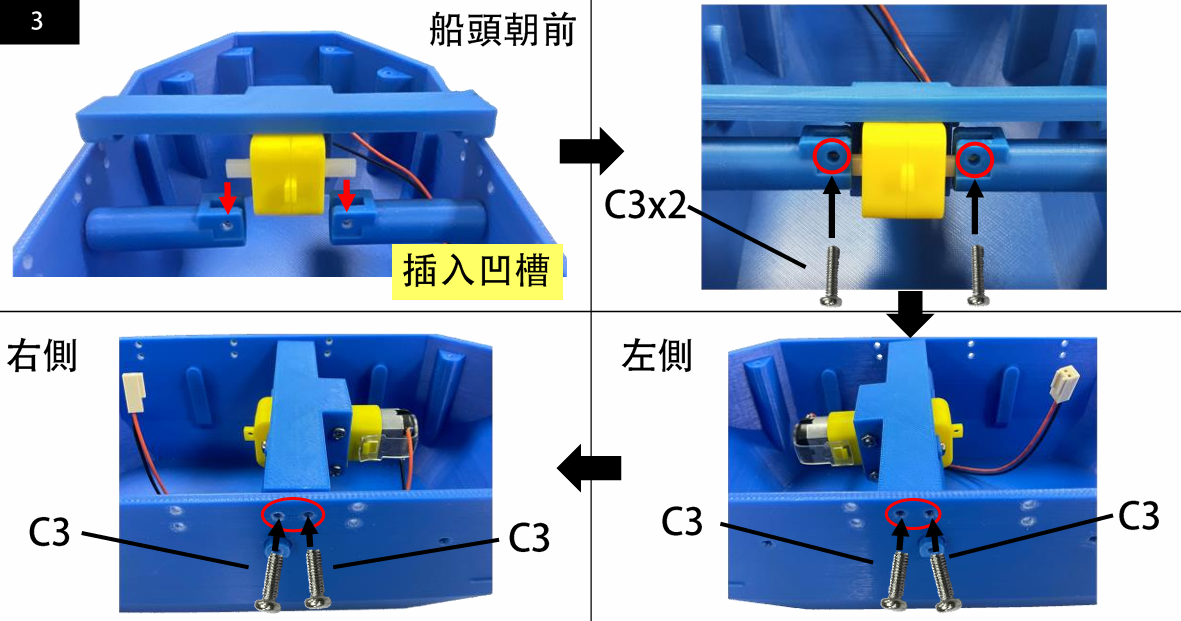
主马达座组装
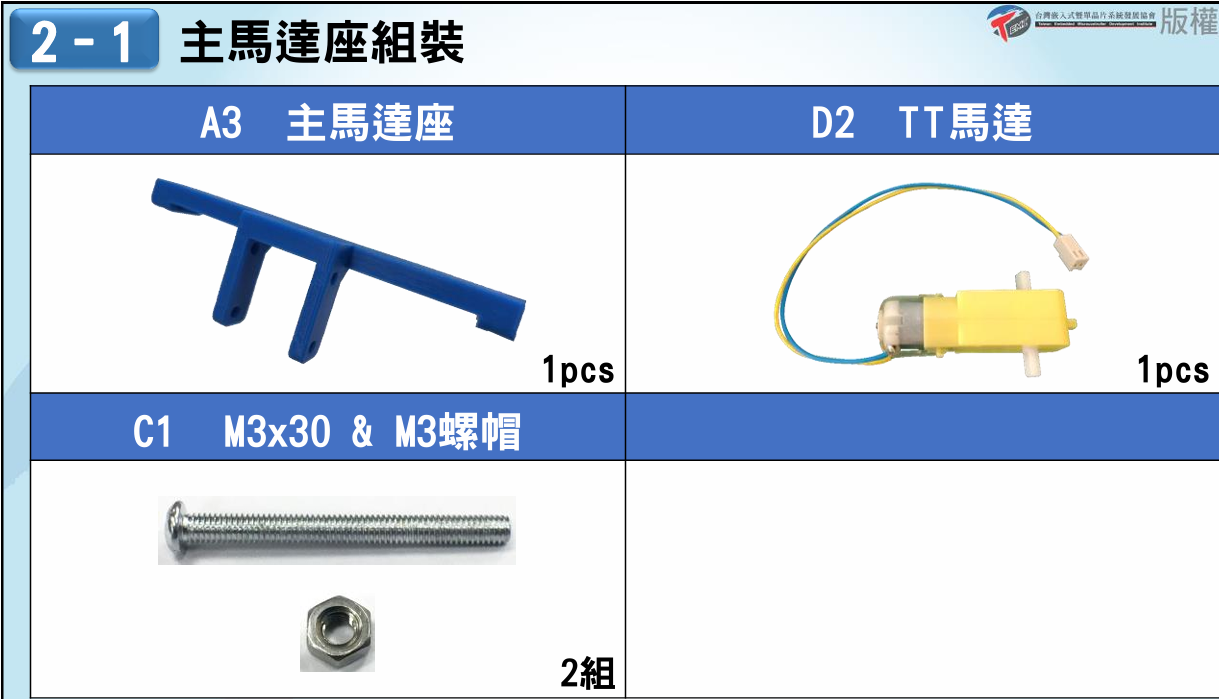
这里我们用到以上三组部件
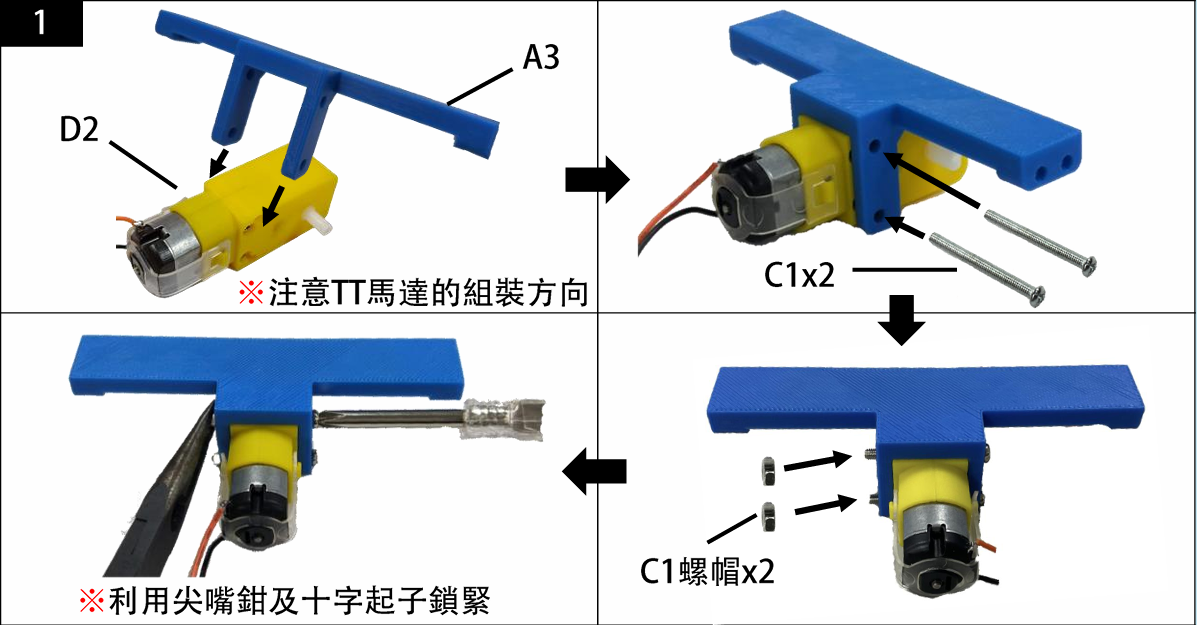
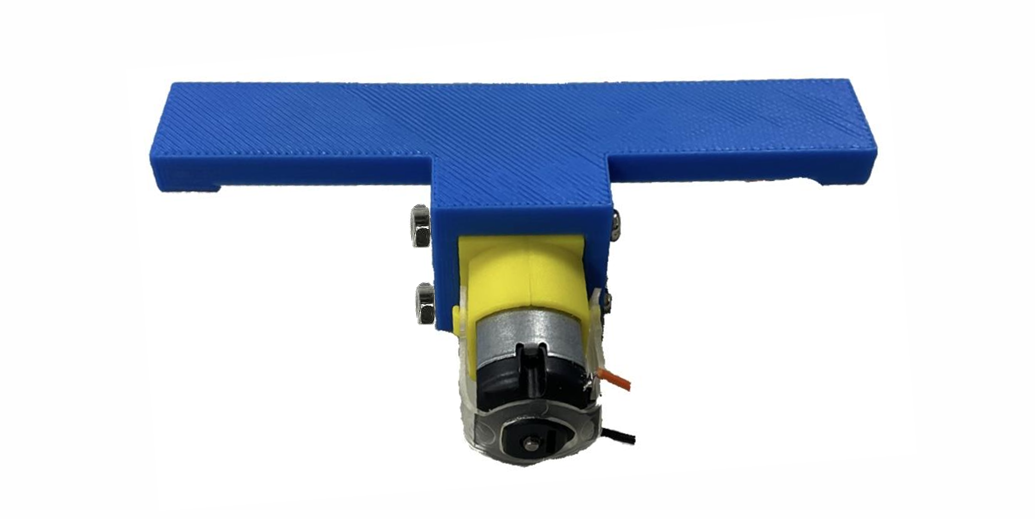
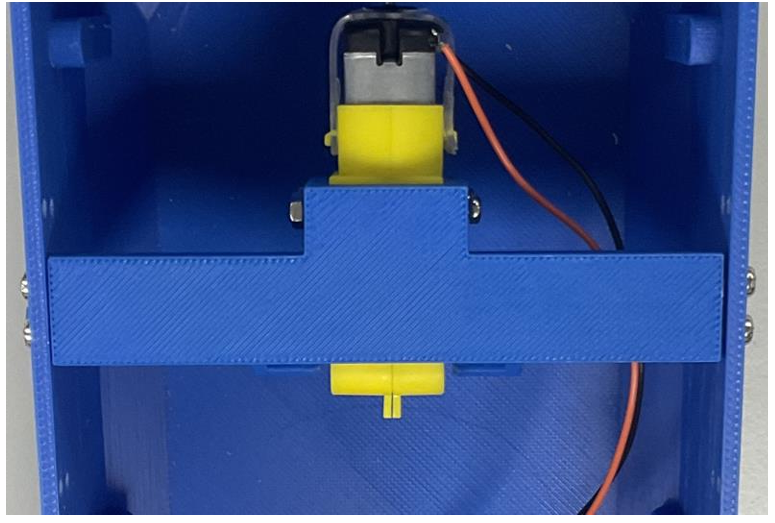
按上图进行组装,成功后入下图
-
传动轴组装
这里,我们使用我们组装好的主马达座
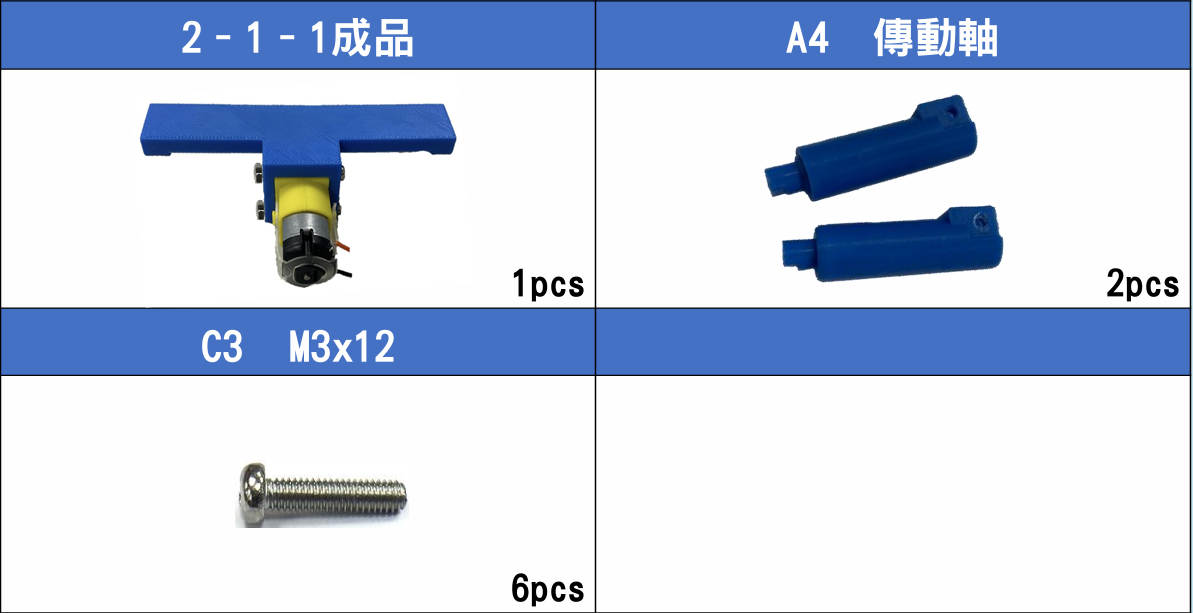
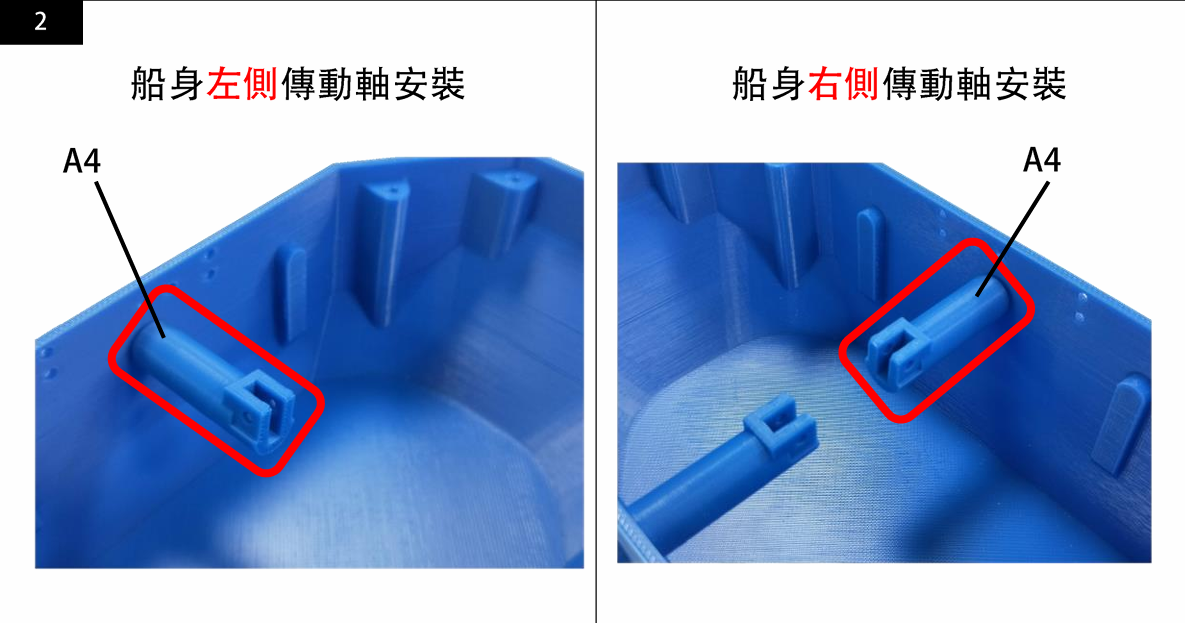
组装成功后,成品如下
-
主旋转轴及次旋转轴安装
这里我们还是使用到了上一步的成品
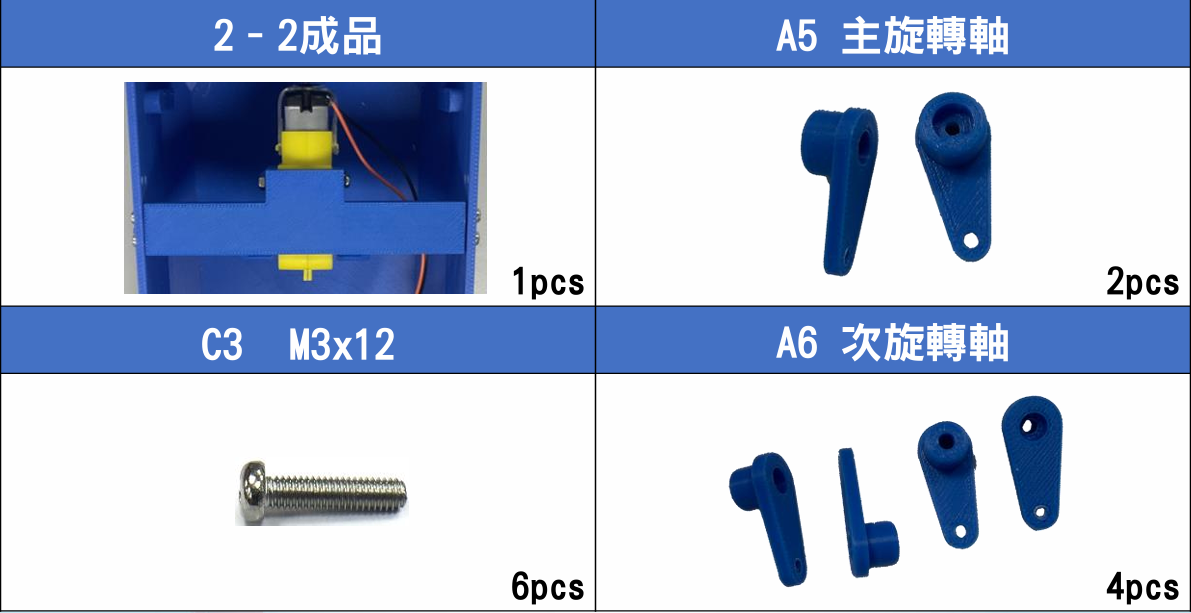
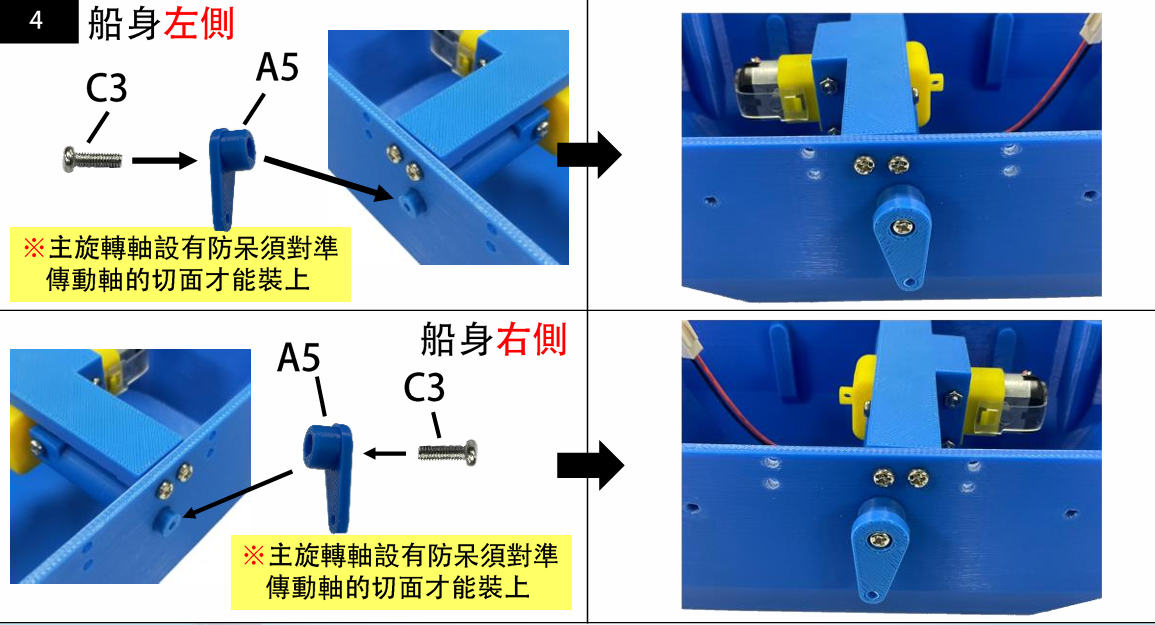
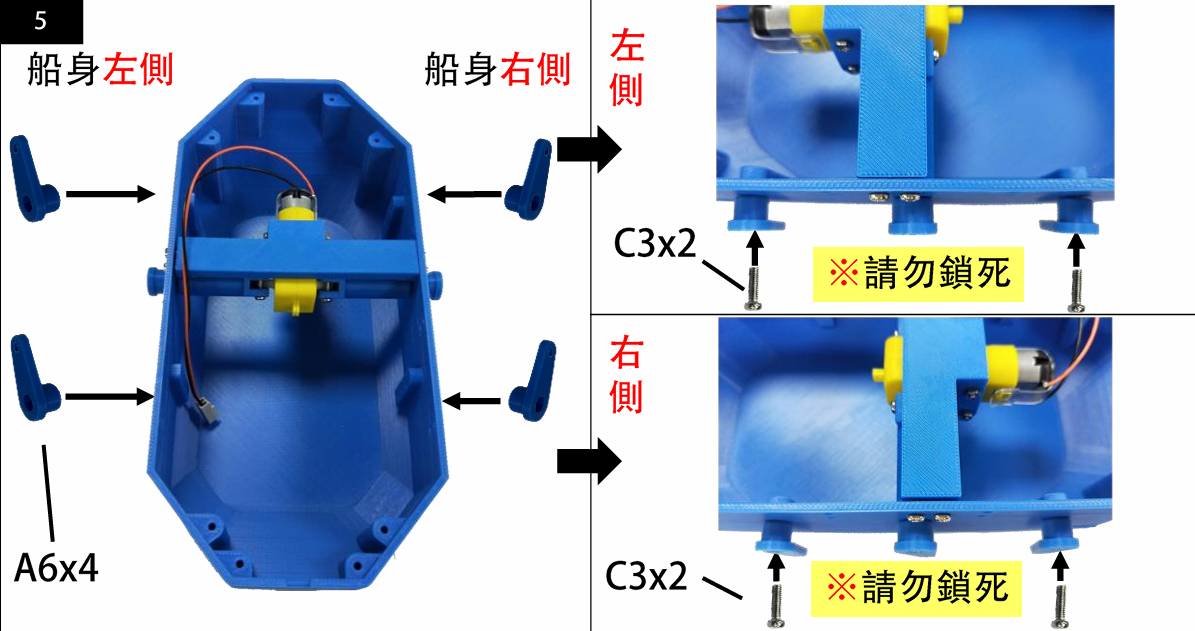
安装成功后,成品如下

龙头及龙尾组装
-
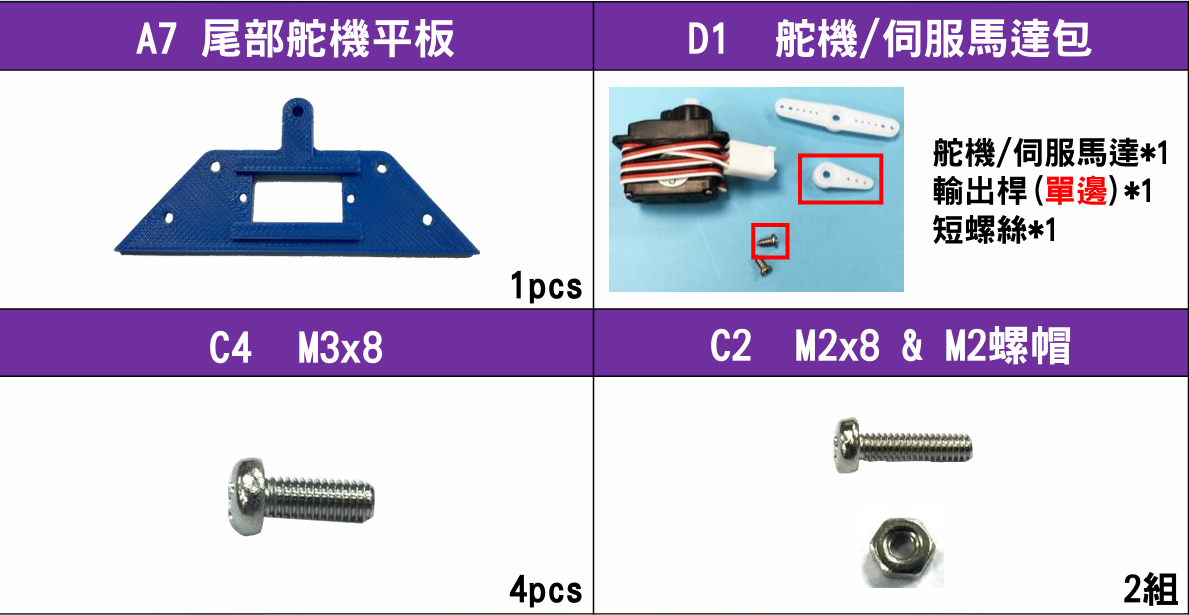
尾部舵机组装
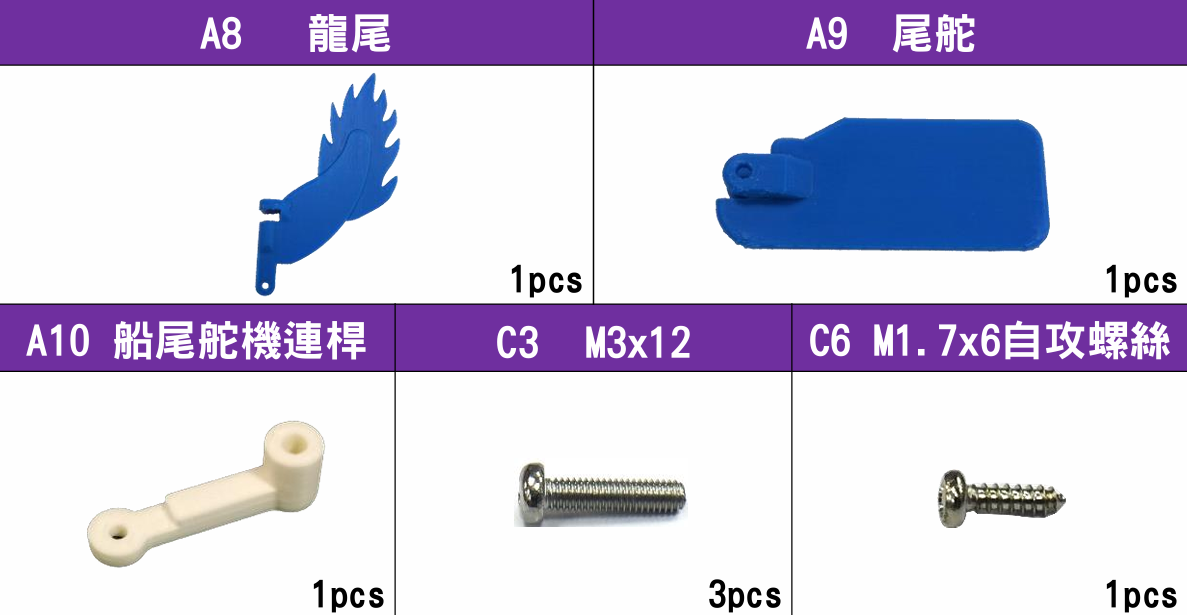
这里我们用到以下部件
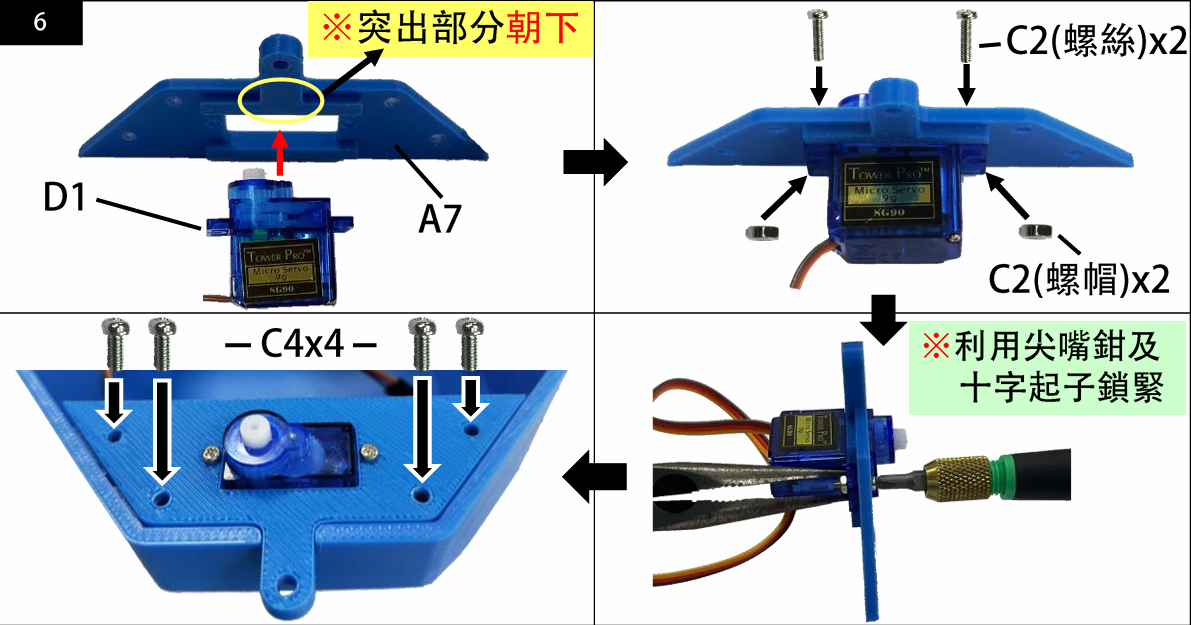
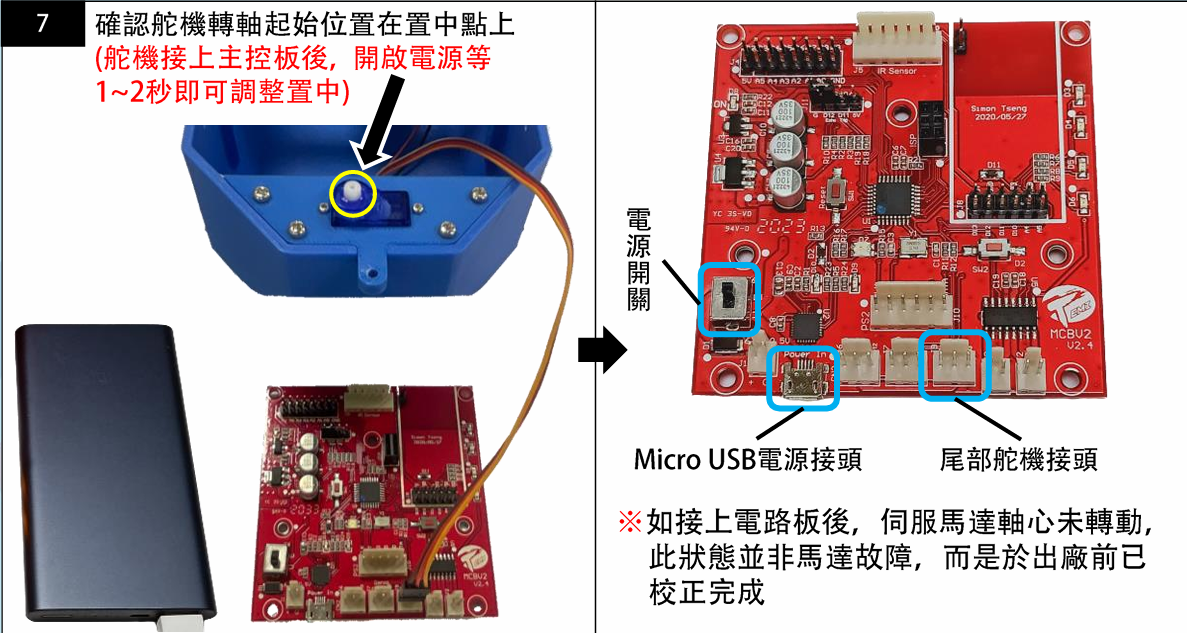
7这一步是使舵机复位,这里我们对我们的板子通电,然后将舵机插到板子上面,等待舵机复位,如果舵机没有转动,不一定是舵机出现故障,而是出场时已经复位了
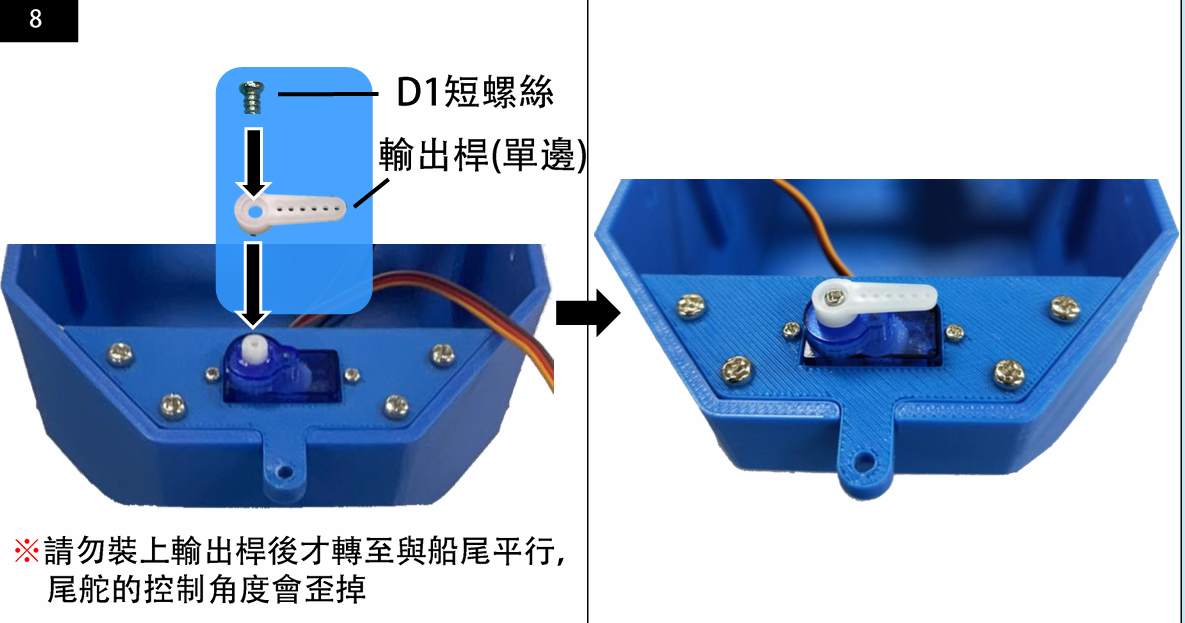
这里我们的舵机的杆,要和我们的船尾平行,不要装上之后把杆拧到平行状态,这里我们一定要平行着把他安装上,不然舵机是非复位状态,对我们后面的编程及使用会产生问题
-
龙尾及尾舵组装

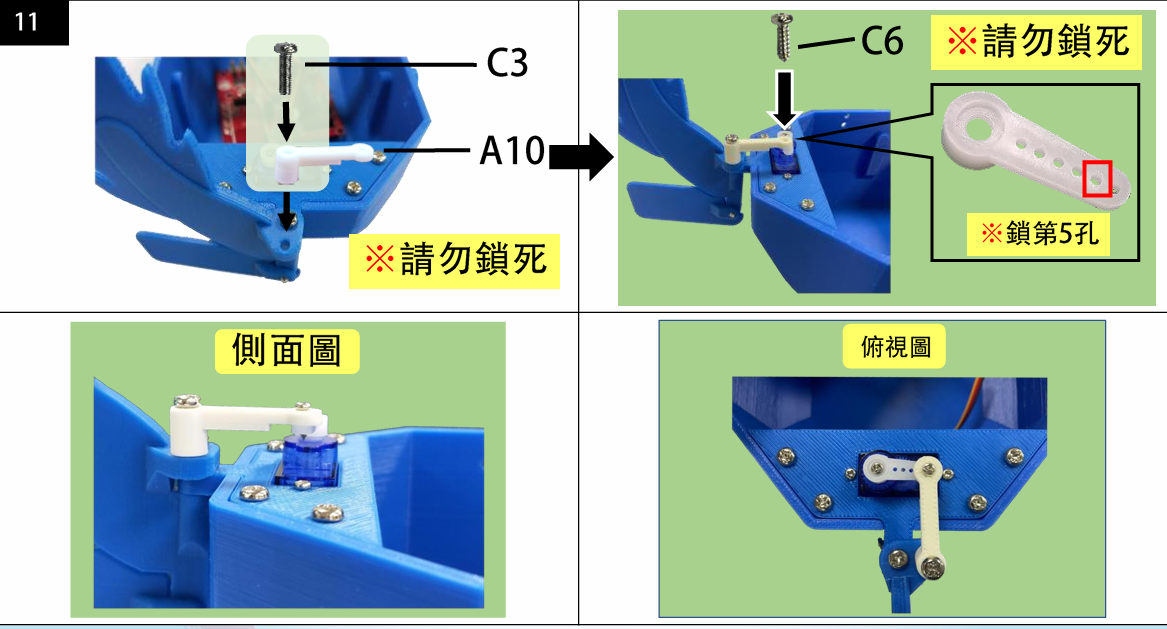
到这里我们的尾部组装全部完成
-
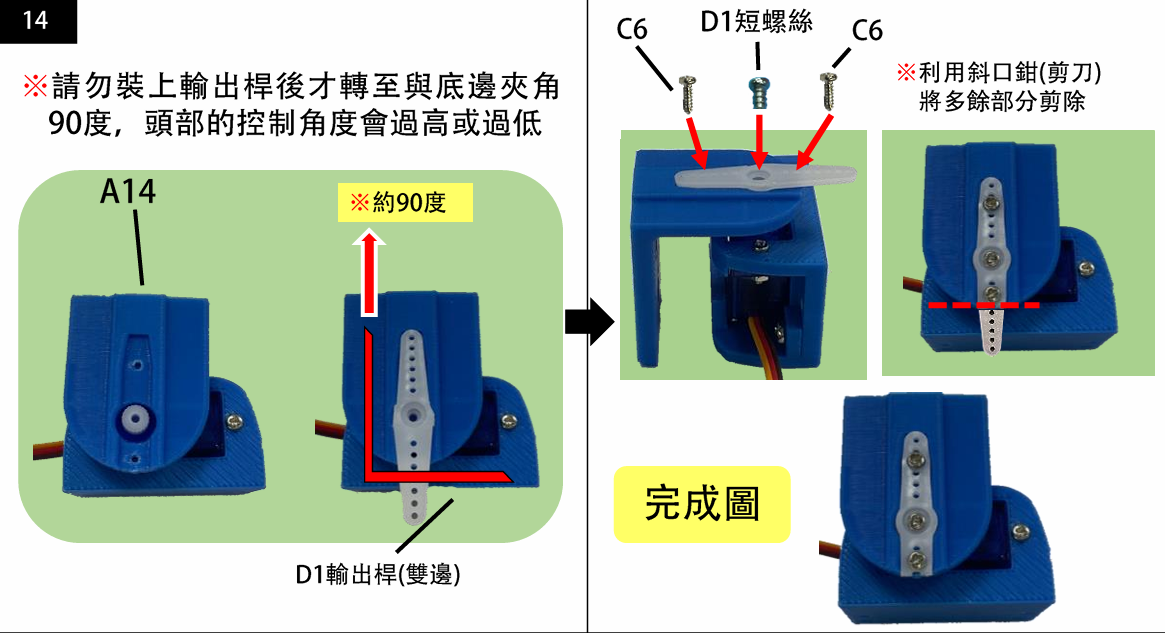
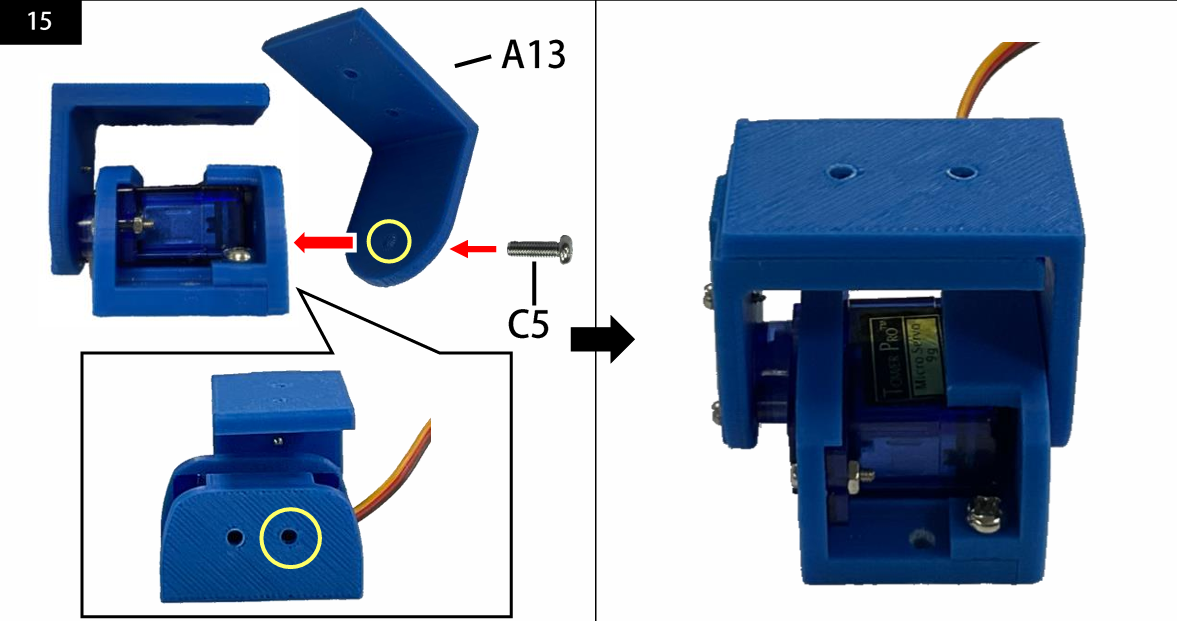
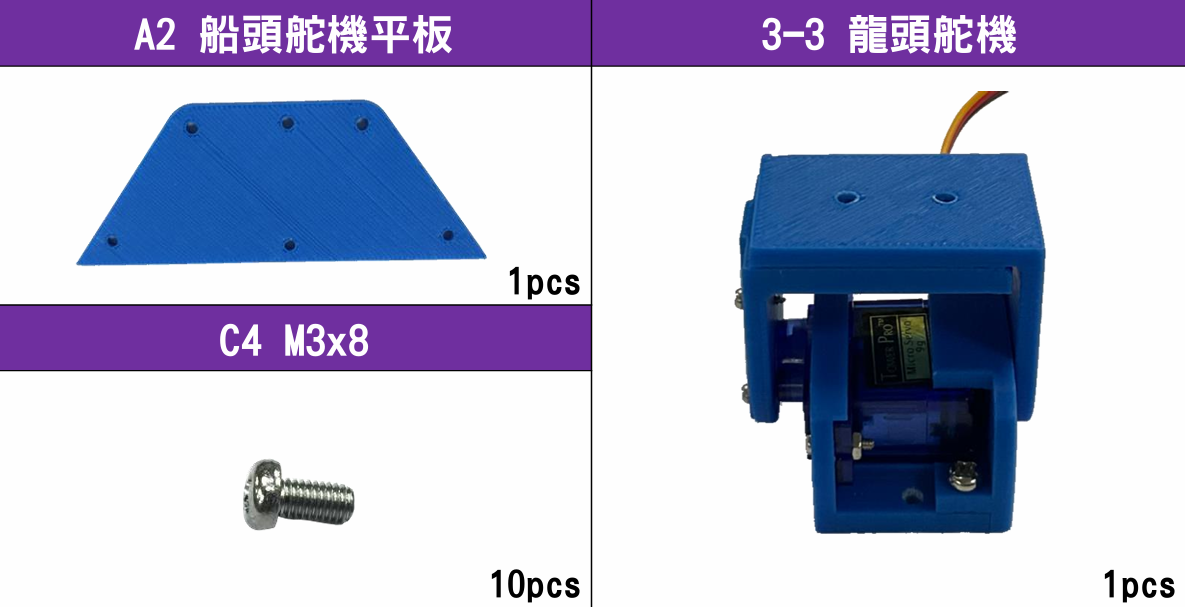
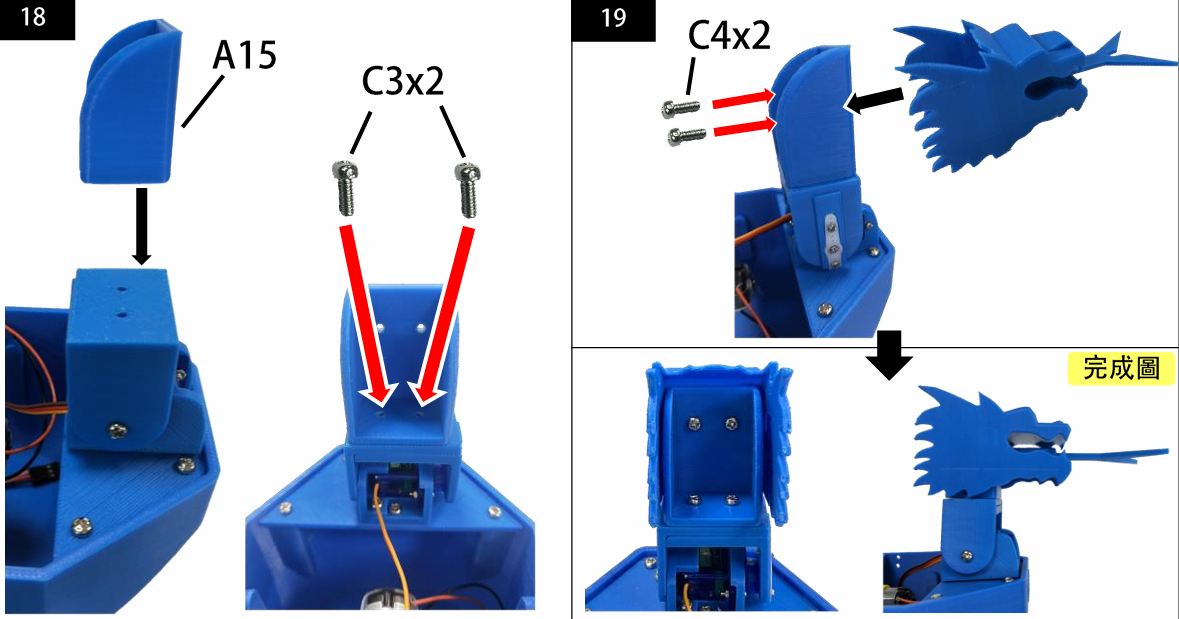
龙头舵机组装
这里我们用到一下部件

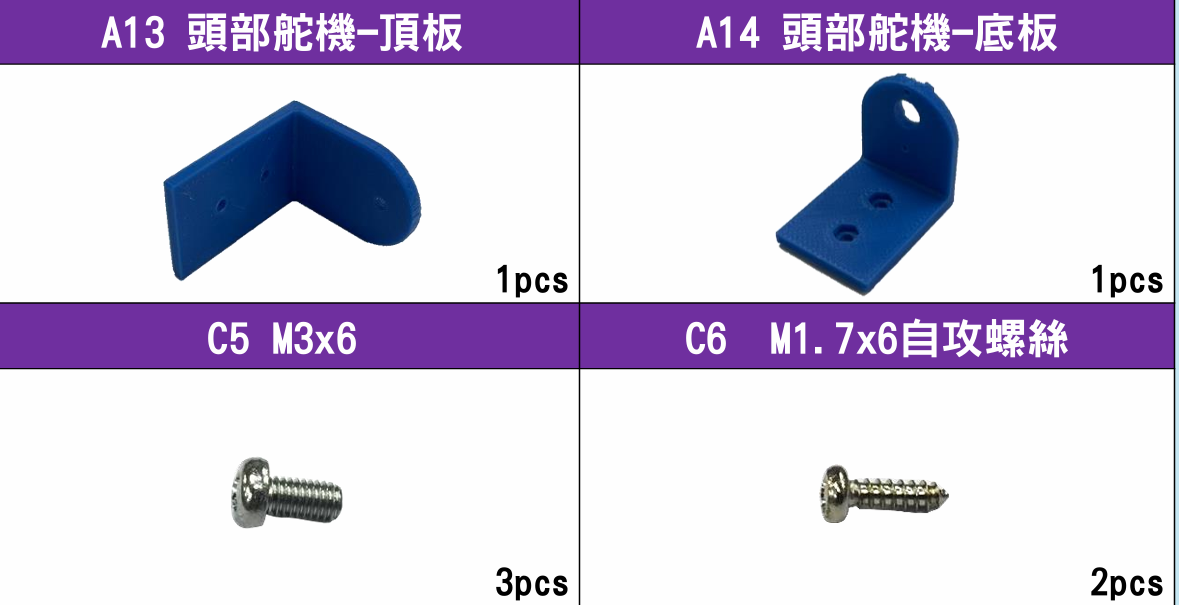
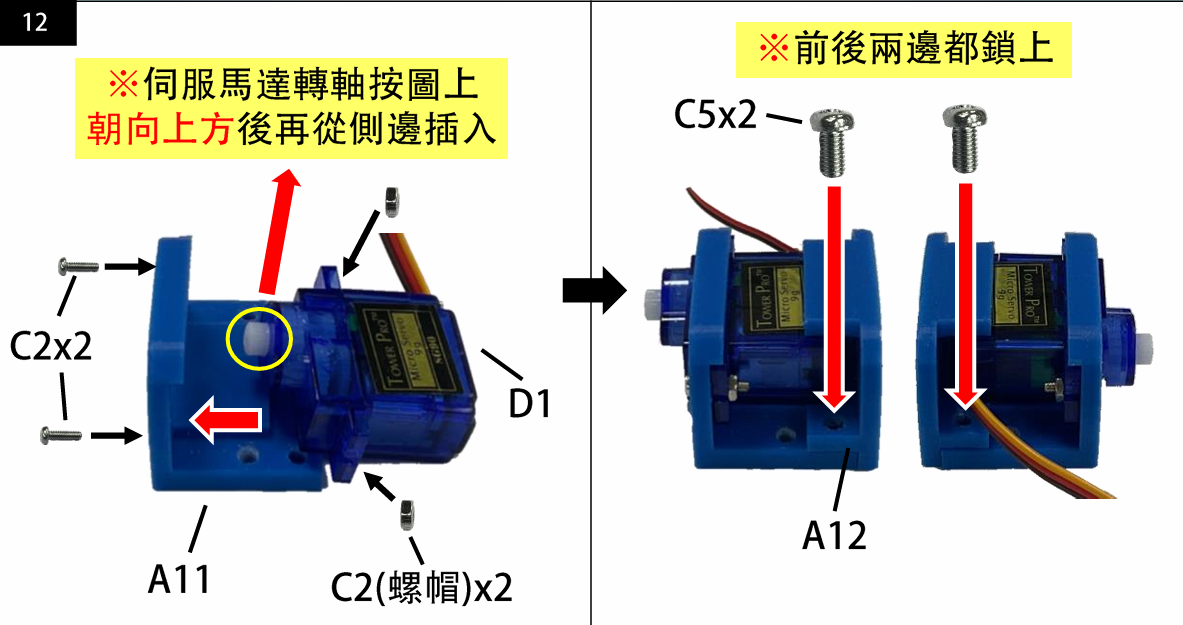
这里不要拧太紧,部件比较容易断裂
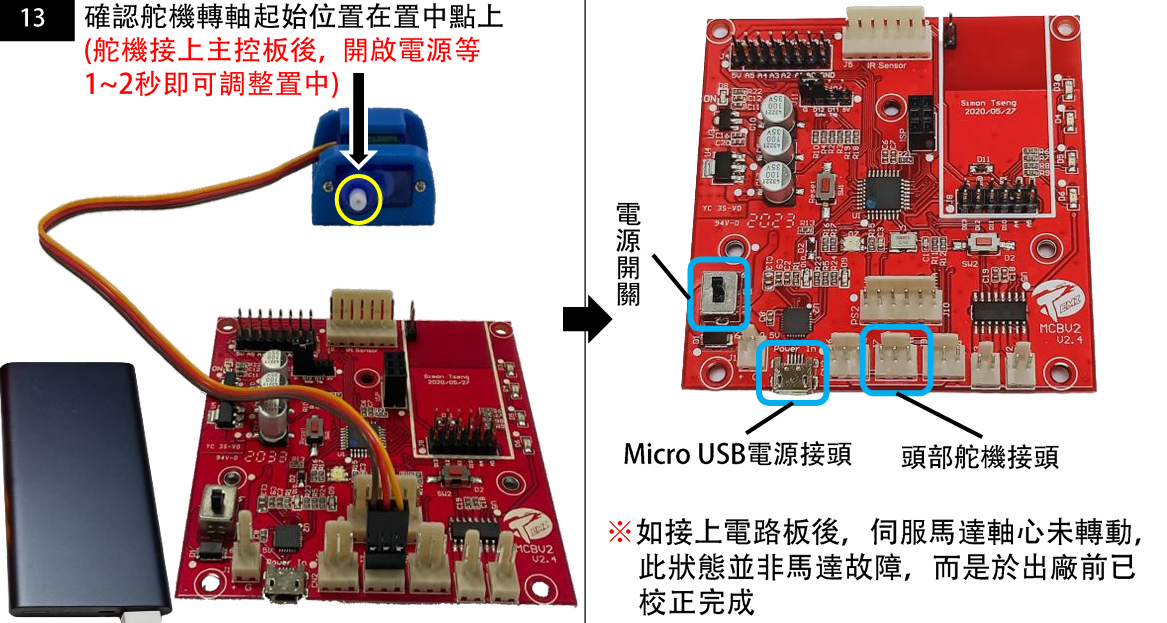
这里和前面一样,给舵机复位
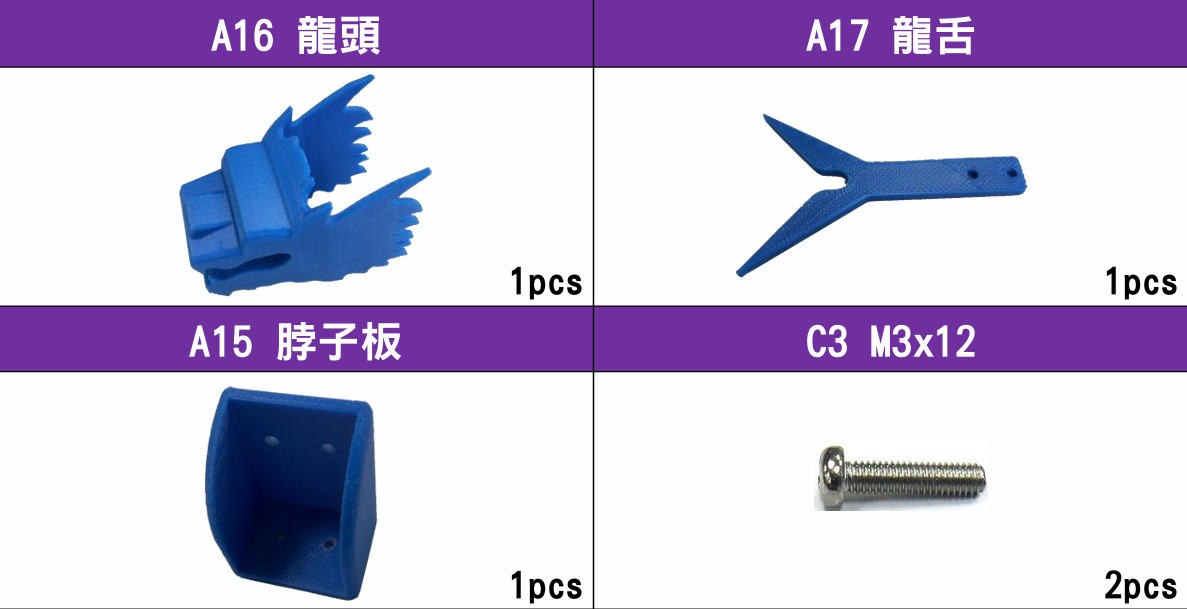
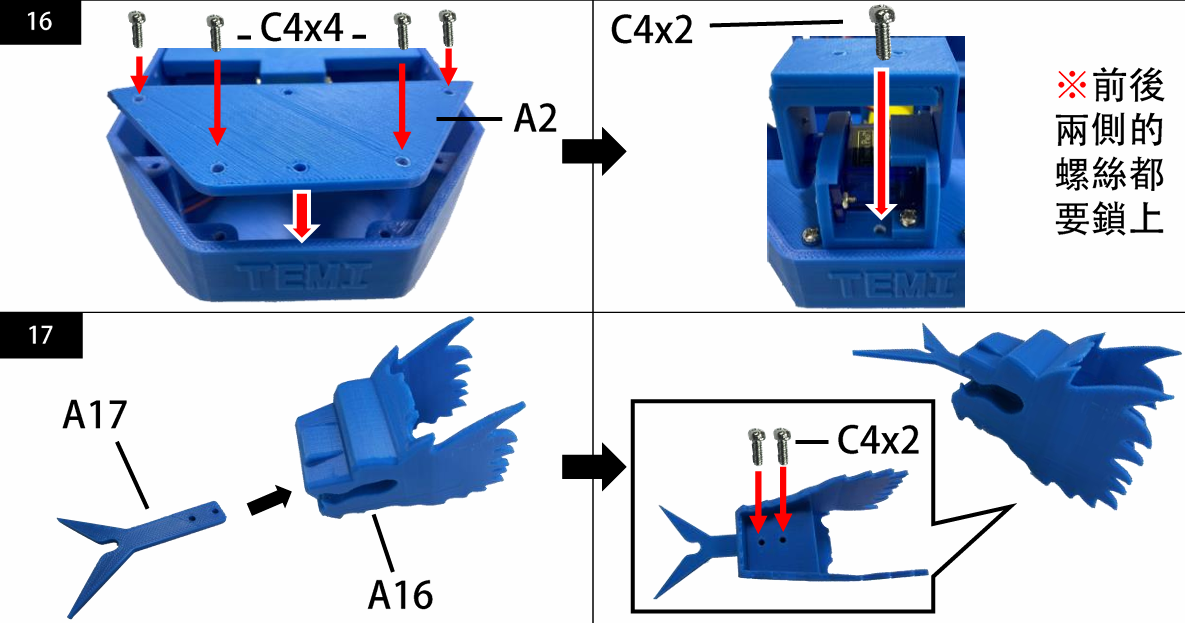
- 船头及龙头组装
这里我们用到以下部件
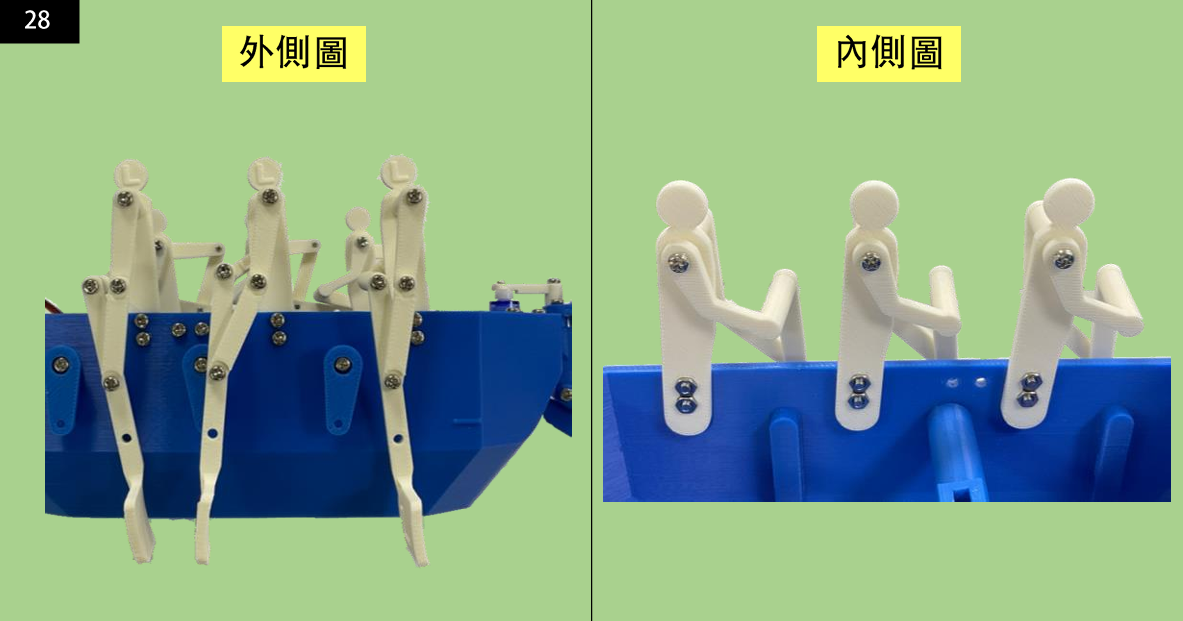
人形组件船身组装
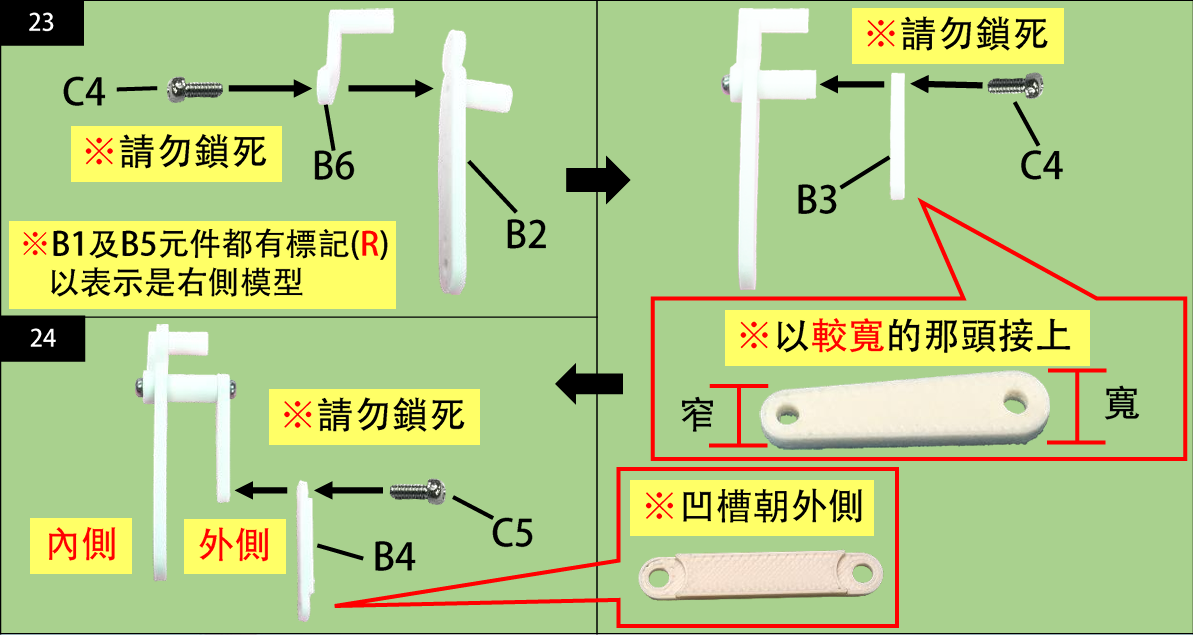
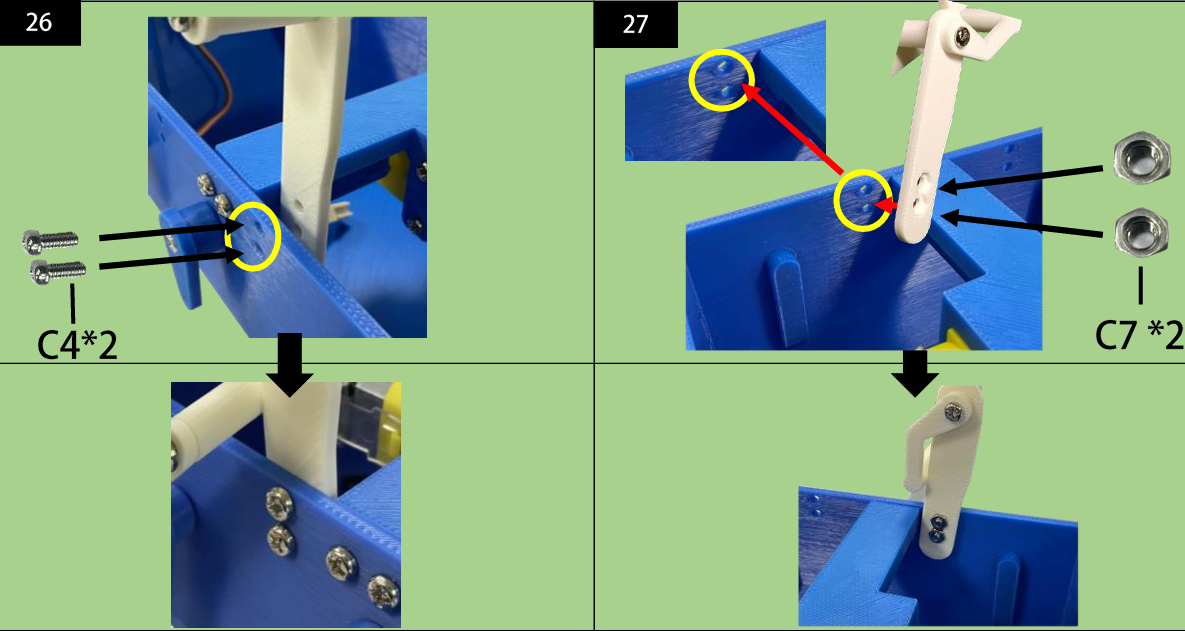
1.左人身组装
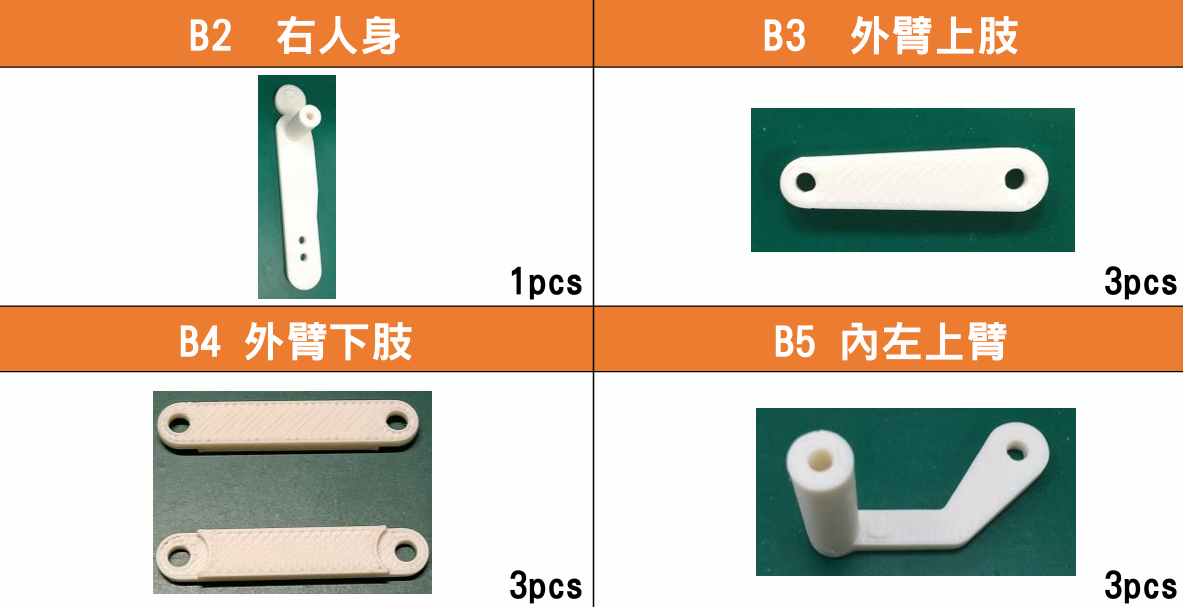
这里我们用到以下部件
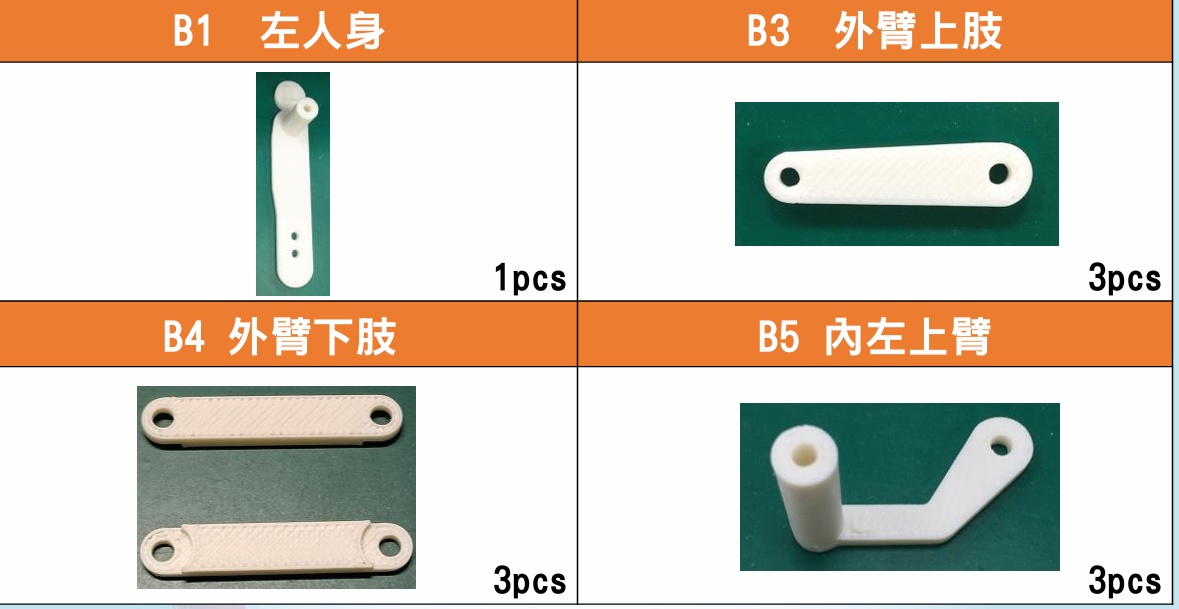
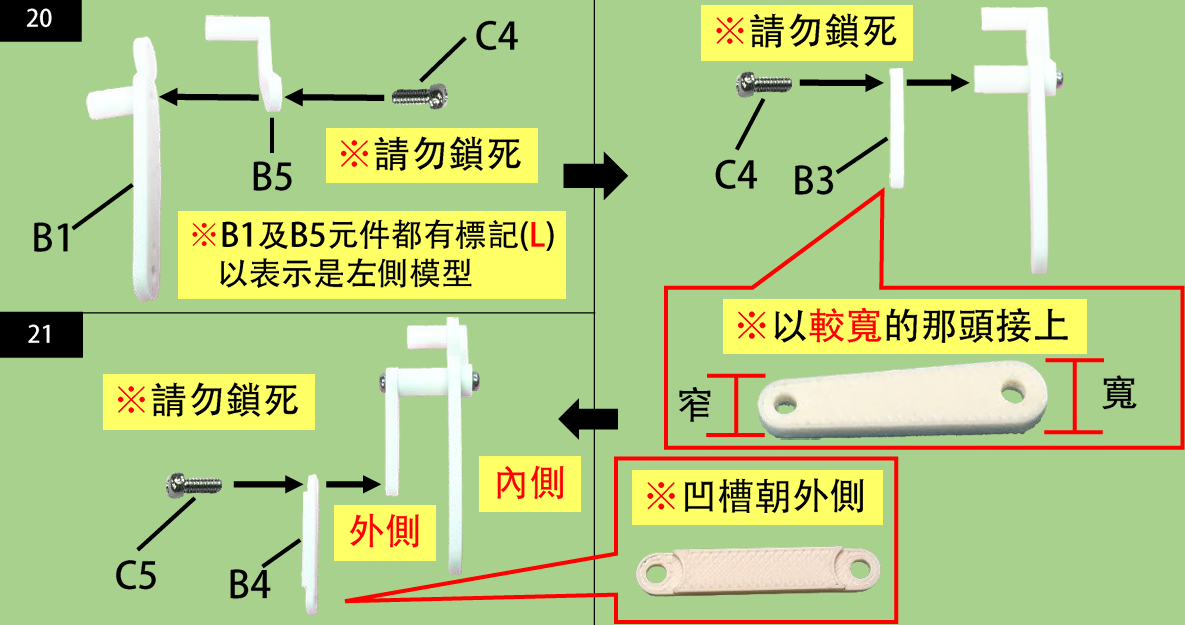
注:这里一定要看好,这里的组件长得比较相似,不要弄错,很难改
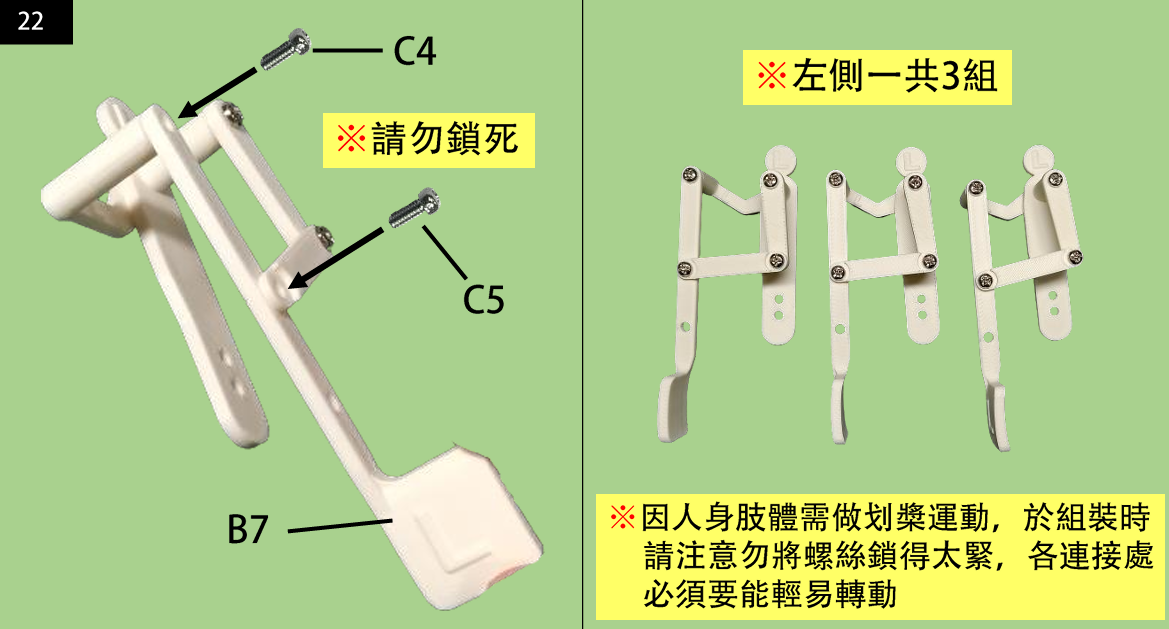
这里我们要注意,不要把螺丝拧的太紧,太紧的话所有部件之间直接接触的摩擦力会变大,导致我们的马达带不动这些部件的运动
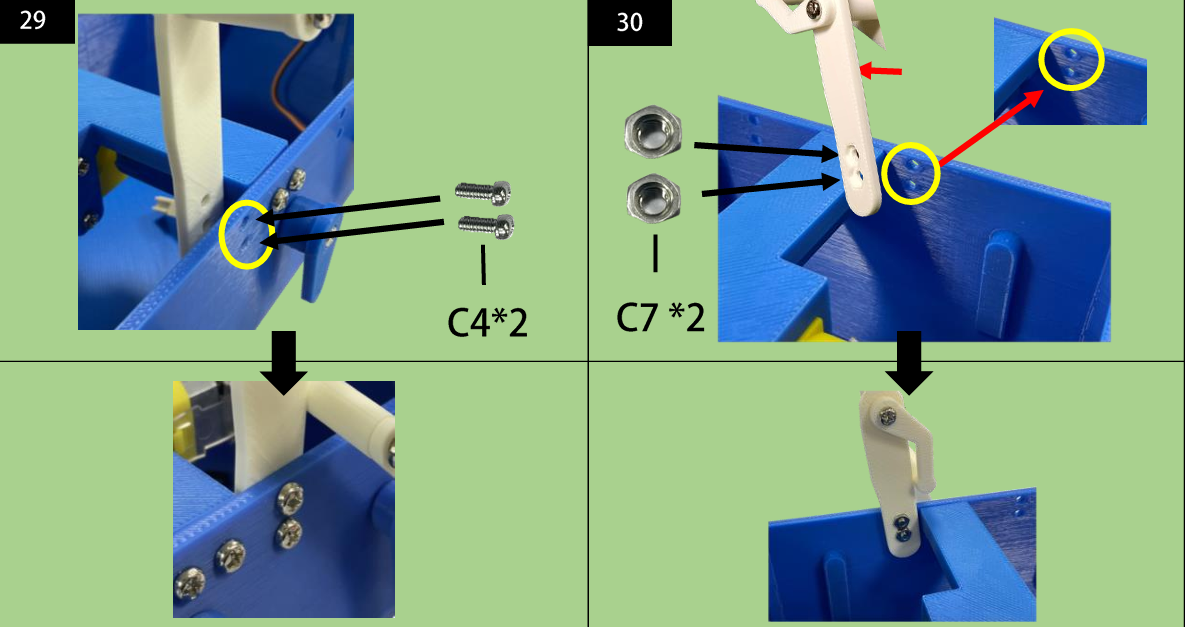
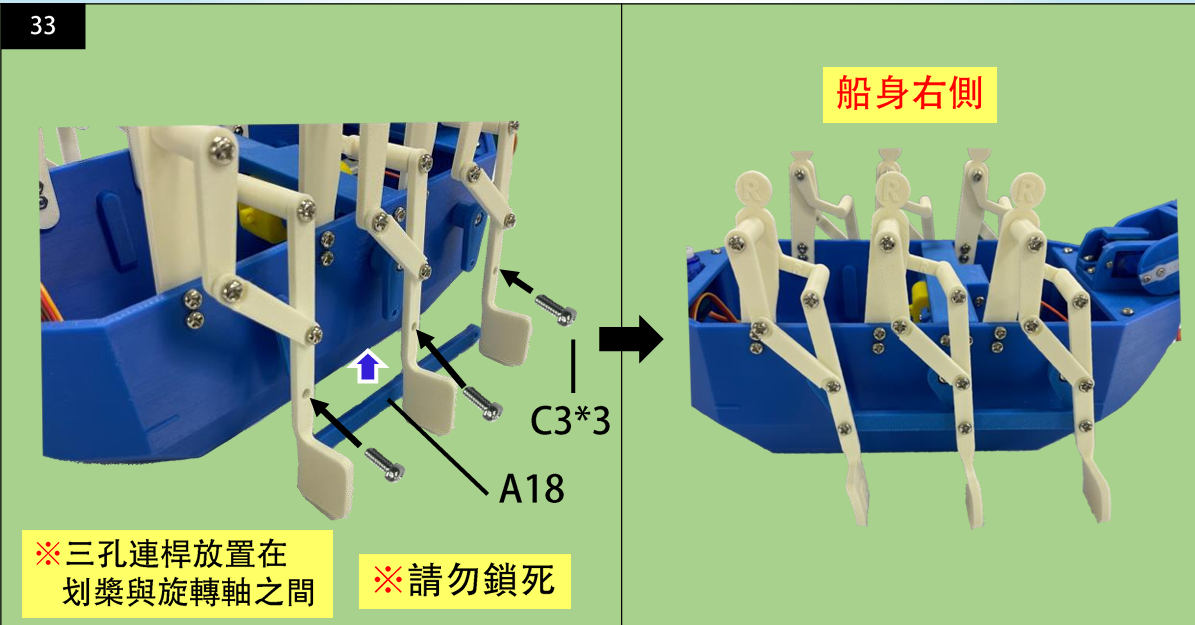
- 右人身组装
这里和左人身是一样的,大家可以结合左人身去组装,也可以按照下面的步骤图组装

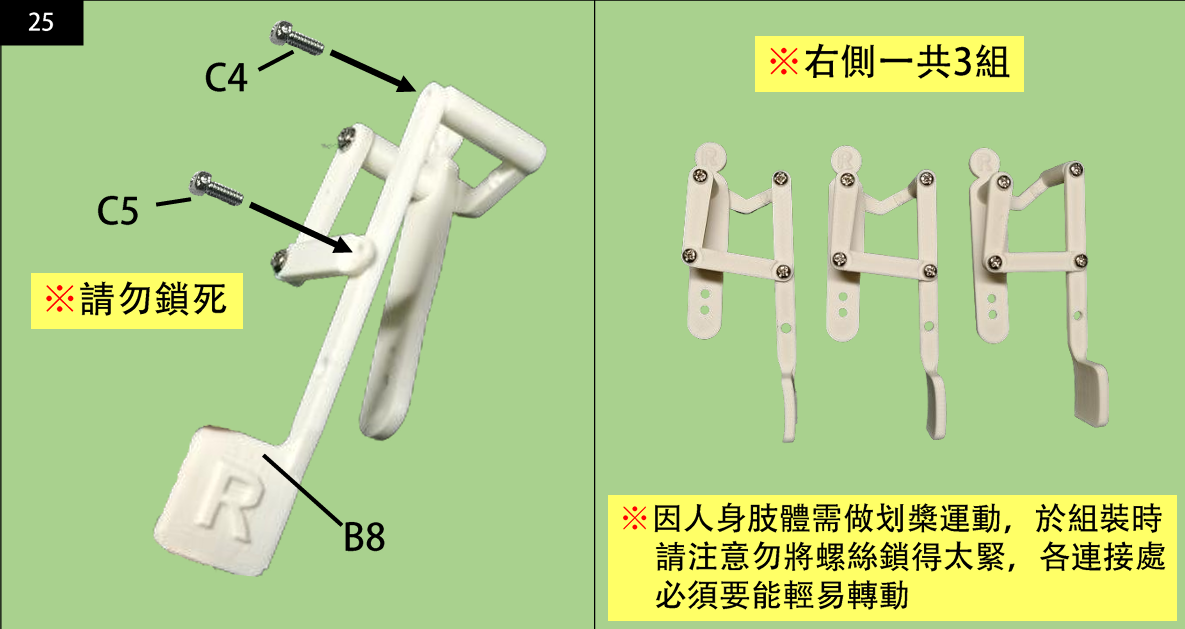
这里和上面一样,不要把螺丝拧的太紧
- 人身及船身组装
这里我们用到以下部件

这里我们按照左右将我们的人身拧上就行,这一步比较简单,如下面这样
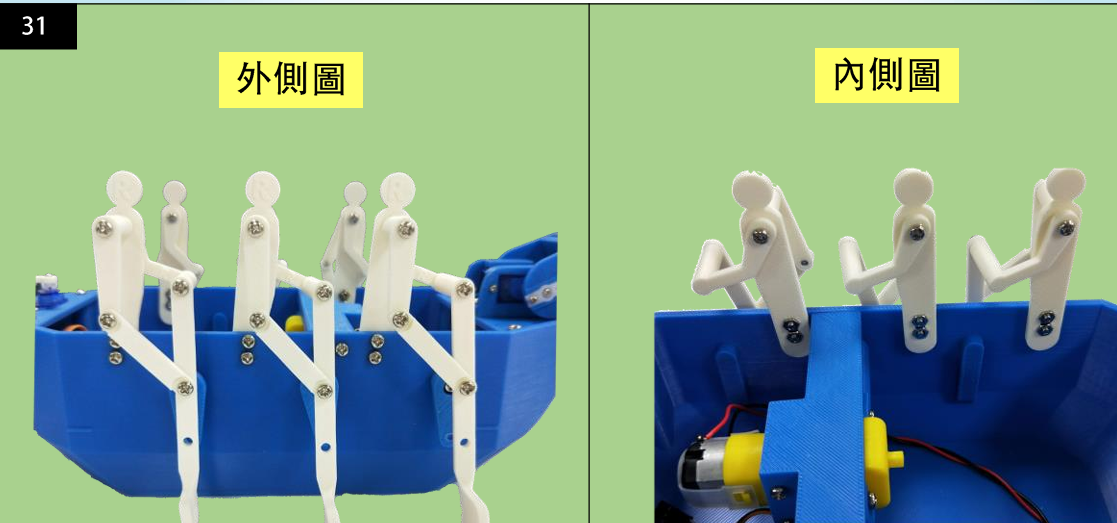
我们把这一部分组装好,我们船身的机械部分就组装好了,大家也可以根据自己的能力对其进行改装
后面我们会给大家介绍我们的足球机器人的组装以及代码部分的编写使用