文章目录
引言
运动目标检测是计算机视觉中的重要应用,广泛应用于安防监控、自动驾驶、人机交互等领域。本文将介绍如何使用OpenCV实现一个简单的视频运动目标检测系统,包括背景建模、形态学处理和轮廓检测等关键技术。
核心功能
这段代码实现了以下功能:
- 视频读取与显示
- 背景建模与前景提取
- 形态学去噪处理
- 运动目标轮廓检测与标记
代码解析
1. 初始化设置
python
import cv2
# 读取视频文件
cap = cv2.VideoCapture('test.avi')
# 创建形态学操作核
kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (3,3))VideoCapture用于读取视频文件getStructuringElement创建形态学操作核,这里使用3×3的十字形核
2. 背景建模
python
# 创建混合高斯背景模型
fgbg = cv2.createBackgroundSubtractorMOG2()createBackgroundSubtractorMOG2()实现了基于高斯混合模型(GMM)的背景减除算法,能够有效分离前景和背景。
3. 视频处理主循环
python
while True:
ret, frame = cap.read()
if not ret:
break
# 显示原始帧
cv2.imshow('frame', frame)
# 应用背景减除
fgmask = fgbg.apply(frame)
cv2.imshow('fgmask', fgmask)
# 形态学开运算去噪
fgmask_new = cv2.morphologyEx(fgmask, cv2.MORPH_OPEN, kernel)
cv2.imshow('fgmask1', fgmask_new)这段代码是视频运动检测系统的核心处理循环,主要完成视频帧的读取、背景减除和噪声处理等功能。下面我将详细解释每一部分:
代码结构解析
python
while True:
ret, frame = cap.read()
if not ret:
break(1) 视频帧读取
cap.read()从视频捕获对象读取下一帧ret是布尔值,表示是否成功读取帧frame是读取到的视频帧图像- 如果读取失败(
not ret),退出循环
(2) 显示原始帧
python
# 显示原始帧
cv2.imshow('frame', frame)cv2.imshow()显示当前帧- 窗口标题为'frame'
- 这是未经处理的原始视频画面
(3) 背景减除处理
python
# 应用背景减除
fgmask = fgbg.apply(frame)
cv2.imshow('fgmask', fgmask)fgbg.apply(frame)应用之前创建的背景减除器- 结果
fgmask是二值图像(前景为白色,背景为黑色) - 显示背景减除后的前景掩码
(4) 形态学开运算去噪
python
# 形态学开运算去噪
fgmask_new = cv2.morphologyEx(fgmask, cv2.MORPH_OPEN, kernel)
cv2.imshow('fgmask1', fgmask_new)cv2.morphologyEx()执行形态学操作cv2.MORPH_OPEN表示开运算(先腐蚀后膨胀)kernel是之前定义的3×3十字形结构元素- 开运算可以去除小的噪声点,平滑物体边界
- 显示去噪后的前景掩码
4. 轮廓检测与目标标记
python
# 寻找轮廓
contours, h = cv2.findContours(fgmask_new, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
# 计算轮廓周长
perimeter = cv2.arcLength(c, True)
# 过滤小轮廓
if perimeter > 100:
# 获取边界矩形
x, y, w, h = cv2.boundingRect(c)
# 绘制矩形框
fgmask_new_rect = cv2.rectangle(frame, (x,y), (x+w, y+h), (0,255,0), 2)
cv2.imshow('fgmask_new_rect', fgmask_new_rect)
# 退出条件
k = cv2.waitKey(50)
if k == 27:
break这段代码完成了运动目标检测的最后关键步骤:轮廓查找、目标筛选和标记。下面我将详细解释每一部分:
(1)轮廓查找
python
contours, h = cv2.findContours(fgmask_new, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)cv2.findContours()在二值图像中查找轮廓- 参数说明:
fgmask_new:经过去噪处理的前景掩码图像cv2.RETR_EXTERNAL:只检测最外层轮廓cv2.CHAIN_APPROX_SIMPLE:压缩水平、垂直和对角线段,只保留端点
- 返回值:
contours:找到的轮廓列表,每个轮廓是点的数组h:轮廓的层次信息(这里未使用)
(2)轮廓处理循环
python
for c in contours:
# 计算轮廓周长
perimeter = cv2.arcLength(c, True)- 遍历所有找到的轮廓
cv2.arcLength(c, True)计算轮廓周长True表示轮廓是闭合的
(3)轮廓筛选
python
# 过滤小轮廓
if perimeter > 100:- 通过周长阈值(100)过滤小轮廓
- 有效去除噪声产生的小轮廓,只保留显著目标
(4)目标标记
python
# 获取边界矩形
x, y, w, h = cv2.boundingRect(c)
# 绘制矩形框
fgmask_new_rect = cv2.rectangle(frame, (x,y), (x+w, y+h), (0,255,0), 2)cv2.boundingRect(c)获取轮廓的最小外接矩形- 返回矩形左上角坐标(x,y)和宽高(w,h)
cv2.rectangle()在原图上绘制绿色矩形框(0,255,0):绿色(BGR格式)2:线宽
(5)结果显示与退出控制
python
cv2.imshow('fgmask_new_rect', fgmask_new_rect)
# 退出条件
k = cv2.waitKey(50)
if k == 27:
break- 显示带检测框的结果图像
waitKey(50)等待50ms,并检查按键- 27是ESC键的ASCII码,按下ESC退出循环
关键技术详解
1. 背景减除(Background Subtraction)
混合高斯模型(MOG2)能够:
- 自适应场景变化
- 处理光照变化
- 区分阴影和实际运动物体
2. 形态学处理
开运算(MORPH_OPEN)过程:
- 先腐蚀:消除小噪声点
- 后膨胀:恢复物体原有大小
3. 轮廓分析
findContours查找前景中的连通区域arcLength计算轮廓周长用于过滤小噪声boundingRect获取物体最小外接矩形
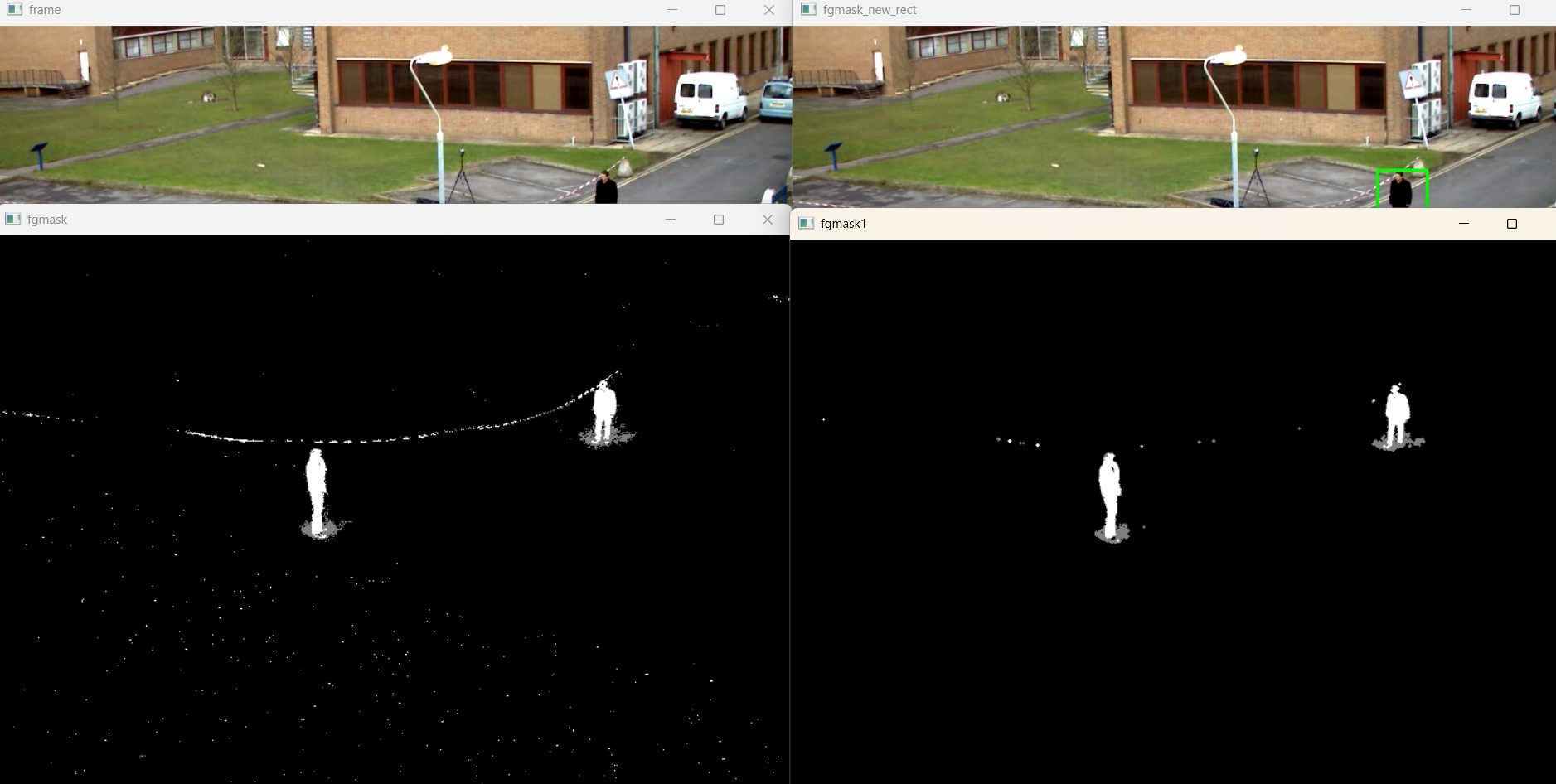
实际应用效果
运行程序后会显示四个窗口:
- 原始视频帧
- 初步前景掩码(含噪声)
- 去噪后的前景掩码
- 最终检测结果(带矩形框标记)
- 效果显示图如下:
总结
本文介绍了基于OpenCV的视频运动目标检测实现方法。通过背景建模、形态学处理和轮廓分析等技术,我们能够有效地检测和标记视频中的运动物体。这种方法计算效率高,适合实时应用场景。
完整代码已在上文给出,读者可以自行尝试并调整参数观察不同效果。OpenCV提供了丰富的计算机视觉功能,值得深入学习和探索。