本文面向校园信息化建设者、技术开发者及教育行业数字化转型关注者 ,旨在解析如何通过 "高精度定位 + AR/VR 场景化服务" 技术体系,破解校区因建筑复杂、人流密集导致的寻路效率低下问题,探讨如何利用现有技术解决校园内导航难题,提升用户体验。
如需获取校园导航系统解决方案可前往文章最下方获取,如有项目合作及技术交流欢迎私信作者。
一、校园导航系统概述
校园导航系统整合地图、定位和 AR 技术,打造室内外一体化导航平台。它全面涵盖校园地理信息,通过多元定位技术实现人员和车辆的精准定位,提供个性化导航方案,支持招生和迎新工作的智能化开展。该系统适用于新生报到、日常教学和访客参观等场景,显著提高校园运行效率和服务质量。

二、校园导航系统技术架构与核心功能详解
1 . 高精度定位技术体系
室外定位 :采用 GPS + 北斗双模卫星定位,结合基站信号增强技术,实现室外 5 米级定位精度。
室内定位 :基于蓝牙信标(iBeacon)部署方案,在教学楼、图书馆等室内场景布设信标节点,通过 RSSI 信号强度算法实现 1-3 米定位误差。
无缝切换机制 :通过信号阈值触发技术(响应时间≤0.5 秒),自动完成室内外定位模式切换。

2. 三维地图构建与轻量化渲染
使用 Unity3D 引擎构建校园三维模型,通过以下技术实现高效渲染:
- LOD(Level of Detail)技术 :根据视角距离动态调整模型精度,远距离显示简化模型,近距离加载精细纹理;
- 网格优化算法 :将复杂建筑结构分解为轻量化组件,减少内存占用。

代码如下:
// Unity3D中三维地图初始化代码示例
public class MapInitializer {
private void LoadCampusModel() {
// 加载不同区域的模型资源
GameObject outdoorModel = Resources.Load<GameObject>("Models/OutdoorCampus");
GameObject indoorModel = Resources.Load<GameObject>("Models/IndoorBuilding");
// 启用LOD组件
LODGroup lodGroup = outdoorModel.AddComponent<LODGroup>();
// 设置不同距离的显示精度
SetLODLevels(lodGroup);
}
// 省略LOD层级设置方法...
}3 AR 实景导航与 VR 校园漫游
- AR 实景导航 :基于 ARKit/ARCore 技术,将虚拟导航箭头叠加至手机摄像头实景画面,支持实时方向指引与路径标注。
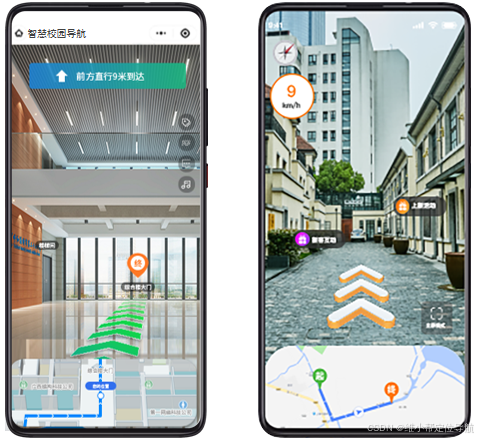
- VR 全景漫游 :利用 WebGL 技术渲染 720° 空中全景,结合三维建模构建虚拟校园,支持报考学生和参观者远程浏览。

核心实现代码如下:
// WebGL VR全景加载示例
function initVRPanorama() {
const panorama = new Pannellum.Viewer('panorama-container', {
type: 'equirectangular',
panorama: 'path/to/campus/panorama.jpg',
autoLoad: true,
compass: true,
showControls: true
});
// 绑定场景切换事件
panorama.on('loadend', function() {
setupSceneHotspots(panorama);
});
}4. 个性化路径规划
基于 AI、Dijkstra 等经典路径规划算法,结合用户起点、终点、出行需求以及校园特色和活动主题,动态生成最优路径。同时考虑用户行走速度和偏好,如避开拥堵区域等,提供贴心的导航指引。

以下是基于 AI 算法的路径规划代码示例:
import heapq
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star(grid, start, goal):
heap = []
heapq.heappush(heap, (0, start))
came_from = {}
cost_so_far = {}
came_from[start] = None
cost_so_far[start] = 0
while heap:
current = heapq.heappop(heap)[1]
if current == goal:
break
for next in grid.get_neighbors(current):
new_cost = cost_so_far[current] + grid.cost(current, next)
if next not in cost_so_far or new_cost < cost_so_far[next]:
cost_so_far[next] = new_cost
priority = new_cost + heuristic(goal, next)
heapq.heappush(heap, (priority, next))
came_from[next] = current
return came_from, cost_so_far三 、技术创新与未来趋势
- 多源数据融合 :未来将接入校园一卡通数据,实现 "考勤 - 导航" 联动,如自动规划上课最优路线;
- AI 行为预测 :基于师生历史行走数据,通过 LSTM 模型预测常用目的地,提供主动导航建议;
- 5G + 物联网集成 :利用 5G 低延迟特性,实现导航信号的毫秒级更新,结合 IoT 设备监控电梯、门禁状态,优化路径规划。
四 、 技术挑战与解决方案
|--------------|-------------------|------------------------------------------|
| 挑战场景 | 技术难点 | 解决方案 |
| 室内定位 信号干扰 | 蓝牙信标受金属结构、 人群遮挡影响 | 采用多信标加权定位算法,结合卡尔曼滤波消除噪声 |
| 三维地图加载性能 | 复杂模型导致 移动端卡顿 | 使用 Progressive Loading 渐进式加载技术,分批次加载模型资源 |
| AR导航 实时性 | 图像识别与定位同步延迟 | 优化SLAM 算法,采用边缘计算节点降低处理延迟 |
五、结语
校园导航系统已从单纯的 "寻路工具" 升级为智慧校园的核心数据入口。当前方案通过蓝牙信标 + AR 技术实现了低成本高效部署,后续可结合AI与物联网技术进一步提升智能化水平。欢迎各位技术同仁在评论区交流校园信息化建设经验,或分享相关技术需求。
如需获取智慧校园导航解决方案可点击文章最下方↓