SLAM 中「安全走廊」拿到手之后,到底有什么用?
安全走廊是把 "杂乱、连续、带未知障碍的地图",变成 "干净、可解、保证不撞墙的凸可行区域",是从「感知」到「运动控制」的核心桥梁 。有了它,原本很难的避障、轨迹优化、控制跟踪,全部变得高效、稳定、可证明安全。
下面从本质、核心用途、落地流程、常用算法、对比优势,把安全走廊的作用讲透,适配自动驾驶 / 移动机器人 / 无人机全场景。
一、先搞懂:安全走廊是什么
安全走廊(Safe Corridor / Safe Flight Corridor / Safe Convex Corridor ),一般是一串连续的、互不重叠的凸多面体(凸集),常见是长方体、椭球、凸多面体。
它的生成逻辑:
- 基于 SLAM 输出的占据栅格、点云、八叉树、ESDF(欧几里得符号距离场);
- 以全局路径(A*/RRT*/JPS) 为中心线;
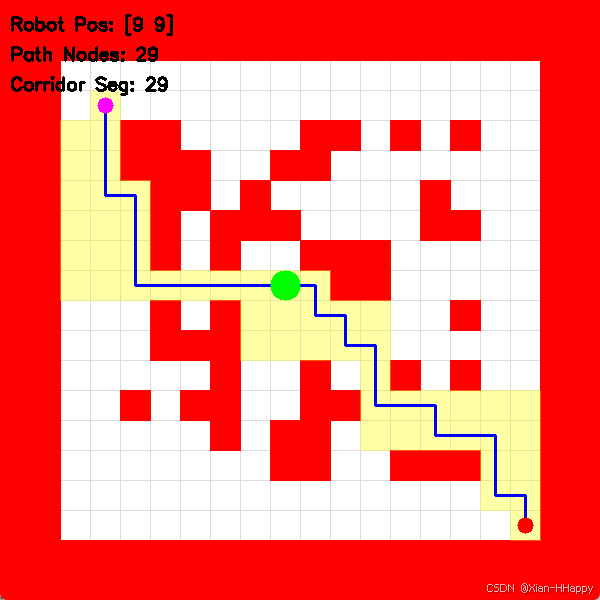
- 向四周膨胀,剔除障碍物,抠出机器人在里面任意走、绝对不会碰撞的最大凸区域;
- 首尾相连,形成一条从起点到终点的 "管状安全通道"。
简单理解:SLAM 给你整栋楼的地图 + 实时障碍 ,全局路径给你回家的大致路线 ,安全走廊就是给你在路线上圈出一条 "绝对不撞墙、不碰家具" 的专用通道,通道内随便走都安全。
二、有了安全走廊,核心 5 大用途(工程落地最关键)
这部分是你最关心的:拿到走廊后,机器人到底靠它做什么动作、跑什么算法。
1. 轨迹优化:把 "折线全局路径" 变成 "平滑可飞 / 可跑的轨迹"
全局规划(A*、RRT*)输出的是离散、折线、带尖角、不可直接跟踪的路径点,机器人 / 无人机直接走会急停、急转、超加速度、抖震。
安全走廊的作用:做轨迹优化的硬约束
- 把走廊的每个凸多面体设为不等式约束(点在凸多面体内 ⇔ 满足 Ax≤b);
- 优化目标:最小化时间、最小化加加速度、最小化曲率、最大化平滑度;
- 约束条件:轨迹上所有点必须落在安全走廊内。
结果:直接生成多项式轨迹(B 样条、贝塞尔、MINCO),全程无碰撞、平滑、满足动力学,可直接下发给控制器。
这是无人机、自动驾驶、轮式机器人高速运动 的标配:无走廊的优化容易撞墙,有走廊 =优化只在安全区里找最优解,永不越界。
2. 实时避障:把 "复杂避障" 降维成 "简单凸约束跟踪"
传统栅格避障(DWA、TEB)的痛点:
- 栅格分辨率固定,窄通道容易卡死;
- 实时采样多,算力消耗大;
- 动态障碍 + 静态障碍混合时,容易震荡、绕不出去。
安全走廊的作用:把避障从 "全地图搜索" 变成 "走廊内微调"
- 静态障碍已经被走廊 "锁死",不用反复检测;
- 只需要处理动态障碍:动态物入侵走廊时,只在当前凸集内重新规划小段轨迹;
- 走廊外的区域直接忽略,计算量暴跌,高频重规划(10~100Hz)无压力。
轮式机器人常用:安全走廊 + DWA/TEB 融合,既保证全局不卡死,又保证局部灵活避障。
3. 保证形式化安全:机器人避障从 "经验调参" 变成 "数学可证明不碰撞"
这是学术 + 工业高端场景的核心价值:
- 普通避障(DWA):靠权重、速度窗口、膨胀半径调参,只能说 "大概率不撞",无法数学证明;
- 安全走廊:凸集内任意点都无碰撞 ,轨迹只要约束在走廊内,严格满足碰撞约束,数学上 100% 不碰静态障碍。
在 AGV、服务机器人、矿区无人车、航空无人机这类安全合规要求高 的场景,安全走廊是过功能安全认证的关键一环。
4. 窄通道、复杂环境:解决 "全局路径通,但局部走不过去" 的卡死问题
SLAM + 全局规划经常出现的 bug:A * 算出一条穿过门缝、走廊、夹道的路径,但局部避障因为膨胀半径、安全距离、观测限制,认为路径太窄,拒绝通过,机器人原地打转。
安全走廊的作用:精准计算 "可通过最大空间"
- 基于 ESDF / 点云,计算机器人本体 + 安全距离的最大可行凸包;
- 明确告诉系统:这里确实能过,且最大宽度 / 高度是多少;
- 强制局部规划在走廊内运动,不会误判 "不可通行",彻底解决窄通道卡死、绕路。
这也是仓储机器人、巡检机器人在狭长走廊、密集货架的核心刚需。
5. 降低算力,支持嵌入式 / 机载端实时运行
SLAM 输出的原始数据:点云、栅格、八叉树,数据量大、查询慢。安全走廊是高度压缩的几何表示:
- 一串凸多面体,几十个面就描述一段长路径;
- 碰撞检测:判断点是否在凸多面体内,一次线性运算即可,远快于栅格遍历、点云最近点查询;
- 非常适合嵌入式芯片(STM32、NVIDIA Jetson、FPGA) 跑实时重规划与控制。
三、完整链路:SLAM → 安全走廊 → 机器人动起来(标准流程)
给你串一遍工程上的标准 pipeline,你就明白走廊在整个系统里的位置:
- SLAM:建图 + 定位,输出占据栅格 / 点云 / ESDF + 机器人实时位姿
- 全局规划:A*/RRT*/JPS 生成无碰撞粗略全局路径
- 安全走廊生成 :
- 以全局路径为中心线
- 膨胀、切割、拟合凸集
- 输出一串连续凸多面体(安全走廊)
- 轨迹优化 / 局部规划 :
- 以走廊为硬约束
- 生成平滑、带动力学约束的轨迹
- 运动控制 :
- 轨迹跟踪(PID、MPC、LQR)
- 实时检测动态障碍,局部重规划时仍受走廊约束
- 执行器:电机 / 舵机 / 电调输出,机器人运动
没有安全走廊 :4 步只能用采样类、栅格类局部规划,慢、抖、不安全、窄通道易卡死。有了安全走廊 :4 步变成凸优化问题,快、稳、安全、可证明。
四、基于安全走廊的主流算法(你后续可以直接用)
不同机器人场景,安全走廊搭配的算法不同,直接给你落地选型:
| 机器人类型 | 安全走廊搭配算法 | 核心效果 |
|---|---|---|
| 多旋翼无人机 | MINCO、B 样条轨迹优化、Fast-Planner | 高速、平滑、三维避障、毫秒级重规划 |
| 自动驾驶 / 无人车 | 凸走廊 + MPC、Lattice 规划、EM Planner | 车道保持、匝道汇入、静态障碍绕行 |
| 轮式移动机器人(AMR) | 安全走廊 + DWA/TEB、凸约束模型预测控制 | 窄通道通行、局部避抖、不卡死 |
| 机械臂 + 移动基座 | 笛卡尔空间安全走廊 + 关节空间优化 | 臂身 + 底盘联合避障,无自碰 + 无环境碰撞 |
五、安全走廊 vs 传统栅格避障:为什么有了它更强?
- 传统栅格:处处设防,计算冗余,约束模糊,易震荡,难优化
- 安全走廊:只约束可行域,计算聚焦,约束明确,可嵌入凸优化,绝对安全
一句话总结差异:传统避障是 "边走边看,躲开所有东西";安全走廊是 "先圈好安全区,在区里随便跑最优"。
六、进阶:安全走廊还能做什么(高阶用法)
- 动态安全走廊SLAM 实时更新障碍,走廊实时重构、收缩、扩张,适配动态环境。
- 多机器人协同为每个机器人分配独立走廊,避免路径交叉碰撞,做分布式安全规划。
- 融合感知不确定性 SLAM 的建图误差、定位误差,加入走廊膨胀,生成鲁棒安全走廊,应对噪声与未知。
- 与 MPC 完美结合 把安全走廊作为 MPC 每一步的状态约束,实现最优控制 + 绝对避障一体化,自动驾驶与高速机器人主流方案。
最终极简总结
有了 SLAM 的地图与定位,安全走廊就是 "可行域的抽象与提纯":
- 给轨迹优化 当硬安全约束,生成平滑可执行轨迹;
- 给局部避障减负,只处理动态障碍,算力拉满、不震荡;
- 给窄通道精准判可通行,解决机器人卡死;
- 给系统安全提供数学证明,满足高可靠场景要求;
- 把复杂非凸环境,变成一串简单凸集,让所有规划、控制算法更好解、更快解、更稳解。
简单说:没有安全走廊,避障是 "摸着石头过河";有了安全走廊,避障是 "走专用高速路"。