【导读】
在智慧城市、安防监控、无人机巡检等应用中,部署在 边缘设备(如Jetson Xavier、树莓派、ARM终端)上的视觉算法越来越重要。而一个普遍的难题是:
主流目标检测模型虽然精度高,但"太重",在边缘端运行缓慢、不稳定,难以落地!
本文将介绍一项专为边缘设备设计的目标检测新方法 ------ EdgeYOLO。它不仅运行速度快、参数量小,还在小目标检测场景中表现出色,是真正意义上的"边缘实时检测神器"。
近年来,随着智能终端的普及,边缘计算(Edge Computing)逐渐成为AI落地的重要场景。无论是在无人机航拍中的实时监控,还是在工业园区的安防巡逻,越来越多的目标检测任务不再依赖云端计算,而是直接在设备本地完成。
然而,边缘设备的算力有限,如何在"低功耗、低延迟"的前提下实现高精度目标检测,成为了模型设计中的一大挑战。
为什么需要 EdgeYOLO?
传统的目标检测模型,大致分为两种:
- Two-stage 模型(如 Faster R-CNN): 精度高,但结构复杂、推理慢
- One-stage 模型(如 YOLO 系列): 速度快,适合部署,但主流版本体积大,难以上边缘端
以 YOLOv5 为例,虽然速度不错,但即使在 Jetson Xavier 上运行,FPS 仍然不理想,且小目标识别能力欠佳。
于是,EdgeYOLO 应运而生 ------
目标: 保留 YOLO 框架优点,同时优化推理速度、模型轻量性与小目标检测效果,让模型真正"跑得快、看得清"。
EdgeYOLO 的核心技术创新
EdgeYOLO 并非简单"瘦身"版本的YOLO,而是在结构优化、训练策略、推理效率等方面,提出了系统性创新。以下是其三项核心技术创新:
- Anchor-Free结构 + Lite解耦检测头(Lite-Decoupled Head)
传统YOLO使用 Anchor机制(每个网格分配多个先验框)定位目标,这虽然提升了大目标检测效果,但:
- 在小目标和边缘场景下表现不稳定;
- 带来了较大的后处理计算成本,不利于实时性。
EdgeYOLO 采用 Anchor-Free****策略 ,借鉴FCOS,直接预测目标中心点与尺寸,大幅减少计算负担与延迟。
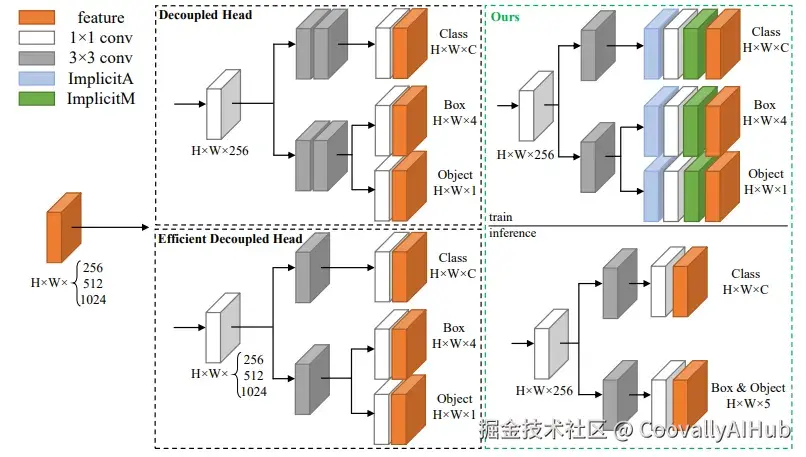
同时,YOLO 系列中的检测头通常是"耦合式"的,也就是说,分类、定位、置信度共享一套卷积核。而 EdgeYOLO 则设计了一种:
- 更轻量、独立结构的解耦检测头;
- 在保持精度的同时,大幅提升推理速度;
- 借助重参数化技术,训练阶段复杂,推理阶段简化(提升硬件执行效率);
- 融合隐式表示层( ImplicitA / ImplicitM ) 增强特征表达力。
如下图所示,EdgeYOLO 在保持结构清晰的基础上,实现了高效推理:
- 灵活有效的数据增强方法(Enhanced Mosaic + Mixup)
在小目标检测中,一个普遍问题是:小目标容易被数据增强过程"稀释"或"遮挡" ,从而使训练过程不稳定。
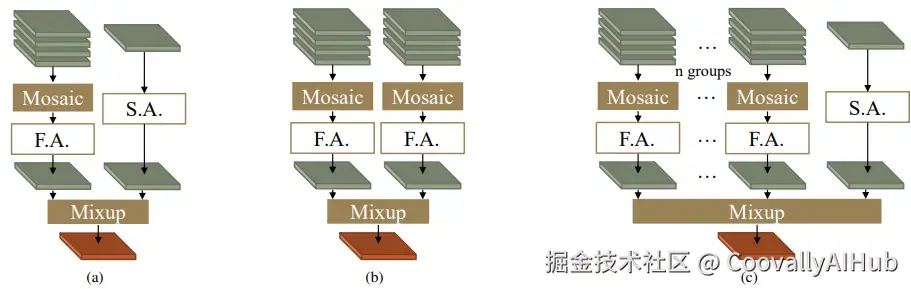
EdgeYOLO对此提出了一种更灵活的多图组增强流程:
- 多组图像先进行 Mosaic 组合;
- 然后与一张轻微增强的图像再进行 Mixup 混合;
- 控制"有效标签"比例,提升训练样本质量。
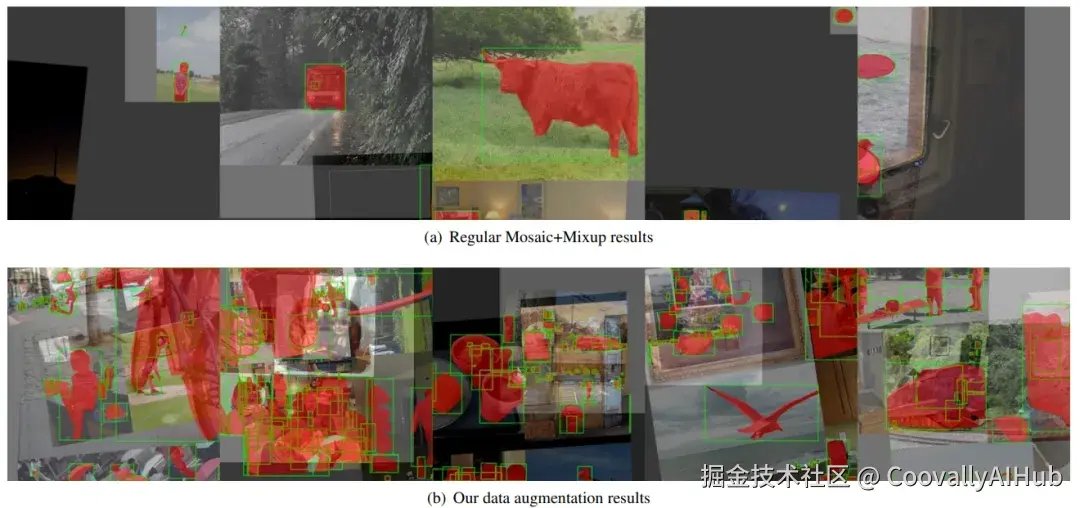
这种方法能显著提高小目标的出现概率,使模型在训练过程中学到更多高质量标签信息,减缓过拟合。
下图展示了不同增强策略下目标有效性对比:
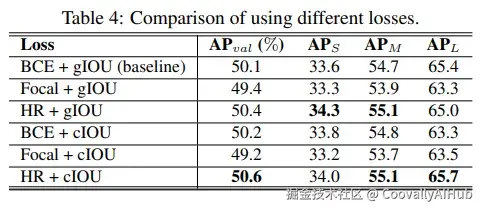
- 三阶段训练机制 + 随机混合损失 (Hybrid Random Loss)
为了进一步提升模型的泛化能力与小目标识别精度,EdgeYOLO引入了分阶段训练机制:
阶段一:标准训练
- 使用常规的 BCE + gIOU,建立模型基本能力
阶段二:引入 Hybrid Random Loss(HRL)
- HRL 将 BCE 的正负样本损失按随机权重混合
- 有助于提升小目标的分类能力
阶段三:微调定位能力
- 数据增强关闭,标签更准确
- 损失函数切换为 HRL + cIOU + L1 loss
这种阶段式策略,使模型兼顾整体精度与小目标表现,在实际实验中带来可见收益:
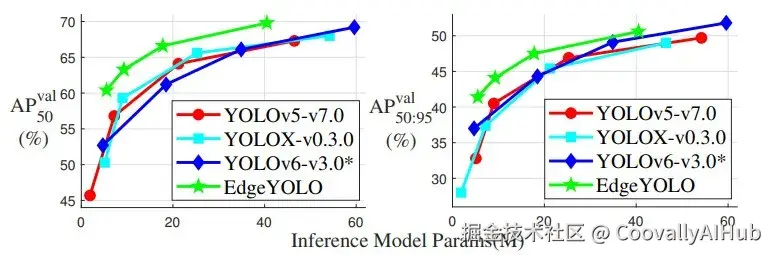
EdgeYOLO 的实战表现到底怎么样?
EdgeYOLO 在两个关键任务数据集上进行了测试:
- 在 COCO 2017 上的表现
MS COCO2017:主流通用目标检测数据集,目标尺寸分布广泛;
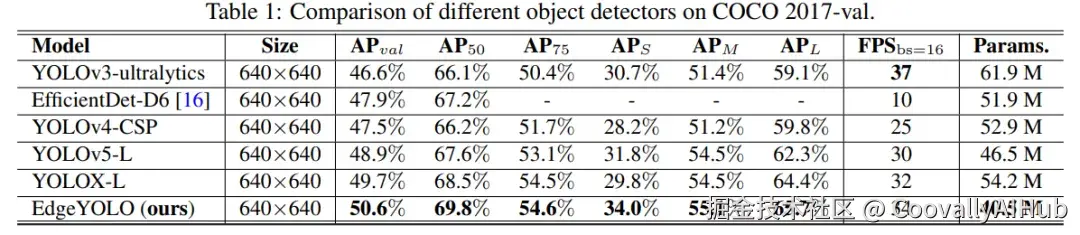
小目标检测性能提升了2.2% AP,FPS稳定达30+,参数减少近20%!
- 在 VisDrone(无人机)任务中的表现
VisDrone2019-DET:典型的 无人机视角小目标检测场景,挑战性极强。
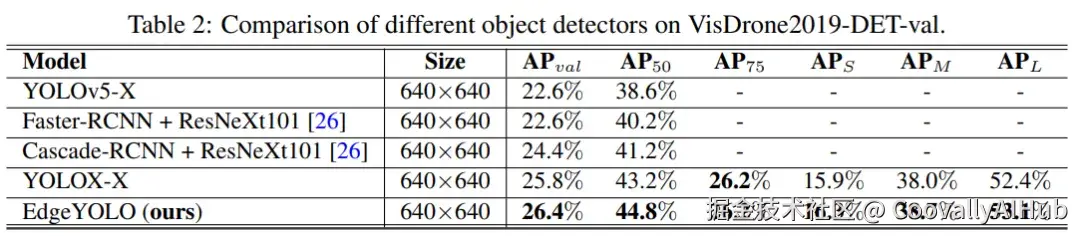

EdgeYOLO 在该小目标密集场景中,超越了多个更大体量模型(如 YOLOv5-X、YOLOX-X ),体现了其在边缘端小目标检测中的强大优势。
如果你对AI项目有长期规划,或正处于多项目并行的开发周期中,Coovally全新推出的「RaaS服务年卡」 , 以交付结果为导向的企业级AI技术服务解决方案。 将为你撬动百万级项目交付能力。
或许你正面临这些挑战:
- 技术门槛高: AI项目需求越来越高,缺乏专业团队难以顺利推进;
- 投入成本大: 搭建一个成熟的AI团队成本动辄上百万,试错代价高昂;
- 项目风险高: 项目合同金额几百万,交付不力却可能造成实际亏损。
Coovally RaaS服务年卡
帮你降本增效,交付有保障!

无论你是AI初创企业、科研团队,还是政府/高校项目负责人,RaaS年卡都将成为你降本增效 、加快交付的核心动力!不仅如此,我们还有A模型适配与边缘部署服务?让你的模型在特定环境部署。
👉 点击链接 ,了解年卡详情,快速开启AI开发之旅。(点击了解更多 RaaS 服务详情)
边缘部署的技巧与建议
EdgeYOLO 还在部署细节上提供了诸多优化建议:
- 输入尺寸自适应:
640×384(16:9)可提升约 47% 推理速度
- 多线程部署结构:
前/中/后处理独立线程并行,FPS可提升 8%~14%
- 推理重参数技巧:
训练时复杂结构,部署时转化为简洁结构,兼顾性能与效率
总结
总的来说,EdgeYOLO 并不仅仅是"YOLO的瘦身版",它更像是一次对轻量化目标检测任务重新定义的探索与落地:
用更少的参数、更低的算力,做到更高的精度、更强的稳定性 ------ 这就是 EdgeYOLO。
如果你正在寻找一款适用于嵌入式设备、边缘推理、无人机巡检等场景的高效目标检测模型,EdgeYOLO 无疑是值得一试的选择。