"在3D游戏开发中,相机不仅是观察世界的窗口,更是连接虚拟与现实的神奇之眼"
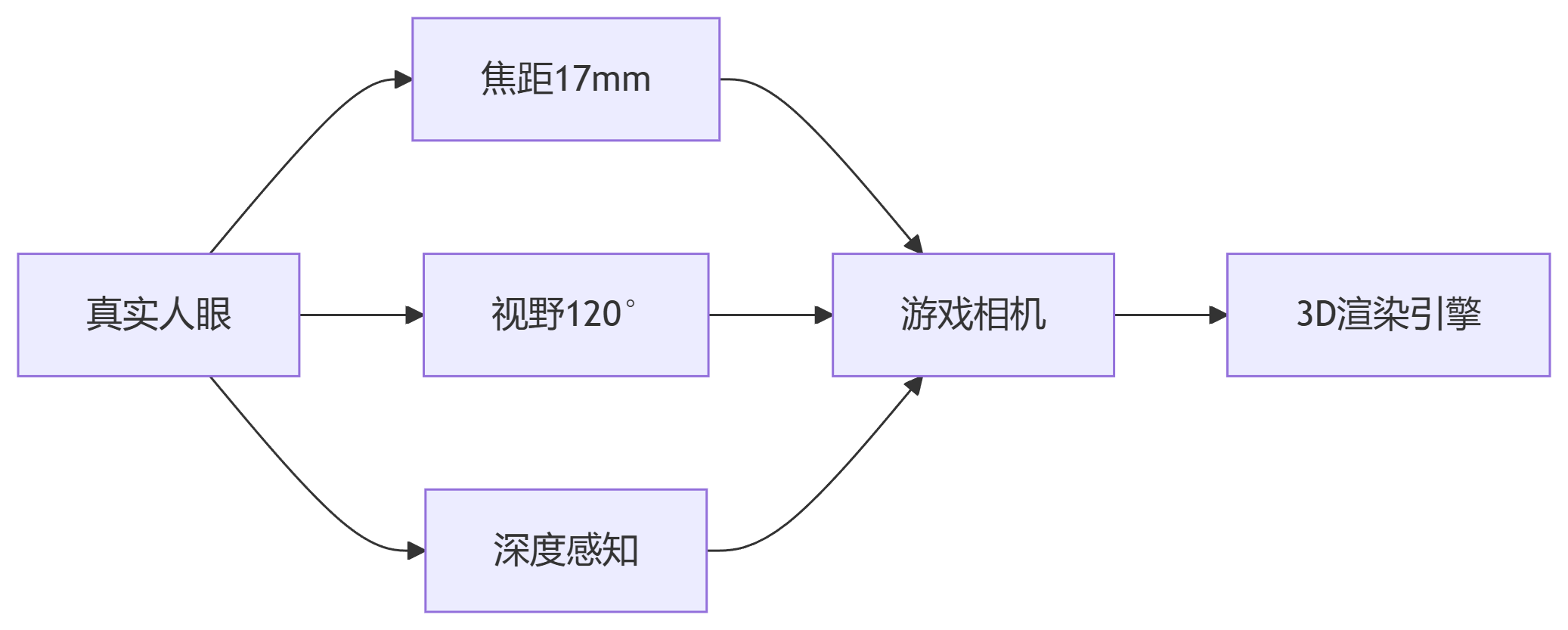
为何以人眼比喻相机?
人眼平均焦距为17mm,这与3D游戏相机的工作原理惊人相似:
-
光学原理相似性:人眼晶状体 = 相机镜头,视网膜 = 图像传感器
-
视野范围(FOV):人眼约120°水平视野 ≈ 游戏相机的Field of View参数
-
深度感知:双目视差原理与3D渲染的Z-Buffer算法异曲同工
坐标系:3D世界的基石
左手坐标系(DirectX标准)
// CameraManager中的坐标系使用
D3DXVECTOR3 m_vCameraPos; // X右,Y上,Z向前-
拇指(X)、食指(Y)、中指(Z)呈直角
-
适用于屏幕坐标系:Z轴深入屏幕
右手坐标系(OpenGL标准)
-
拇指(X)、食指(Y),中指(Z)指向观察者
-
数学计算更自然,但不符合屏幕直觉
行业现状:80%的3D游戏引擎采用左手坐标系,因其更符合"屏幕是窗口"的直觉认知
相机系统核心实现
1. 相机变换矩阵
// CameraManager::UpdateMainCamera
D3DXMATRIX matCamera;
CMyBitmap::Motion_GetMatrix(p3DObj->GetMotion(0), 0, &matCamera);
// 计算视图矩阵
D3DXMatrixLookAtLH(&matView, &vPos, &vViewAt, &vUp);视图矩阵计算公式:
[ Right_x Up_x Forward_x 0 ]
[ Right_y Up_y Forward_y 0 ]
[ Right_z Up_z Forward_z 0 ]
[ -dot(P,Right) -dot(P,Up) -dot(P,Forward) 1 ]2. 双投影模式
// CameraManager::SetCameraType
void CameraManager::SetCameraType(bool bCameraType) {
m_bCameraType = bCameraType; // true=透视,false=正交
CMyBitmap::GameCameraSetType(bCameraType);
}| 投影类型 | 特点 | 应用场景 |
|---|---|---|
| 透视投影 | 近大远小,符合人眼 | 3D主场景 |
| 正交投影 | 无透视变形 | UI界面、2D元素 |
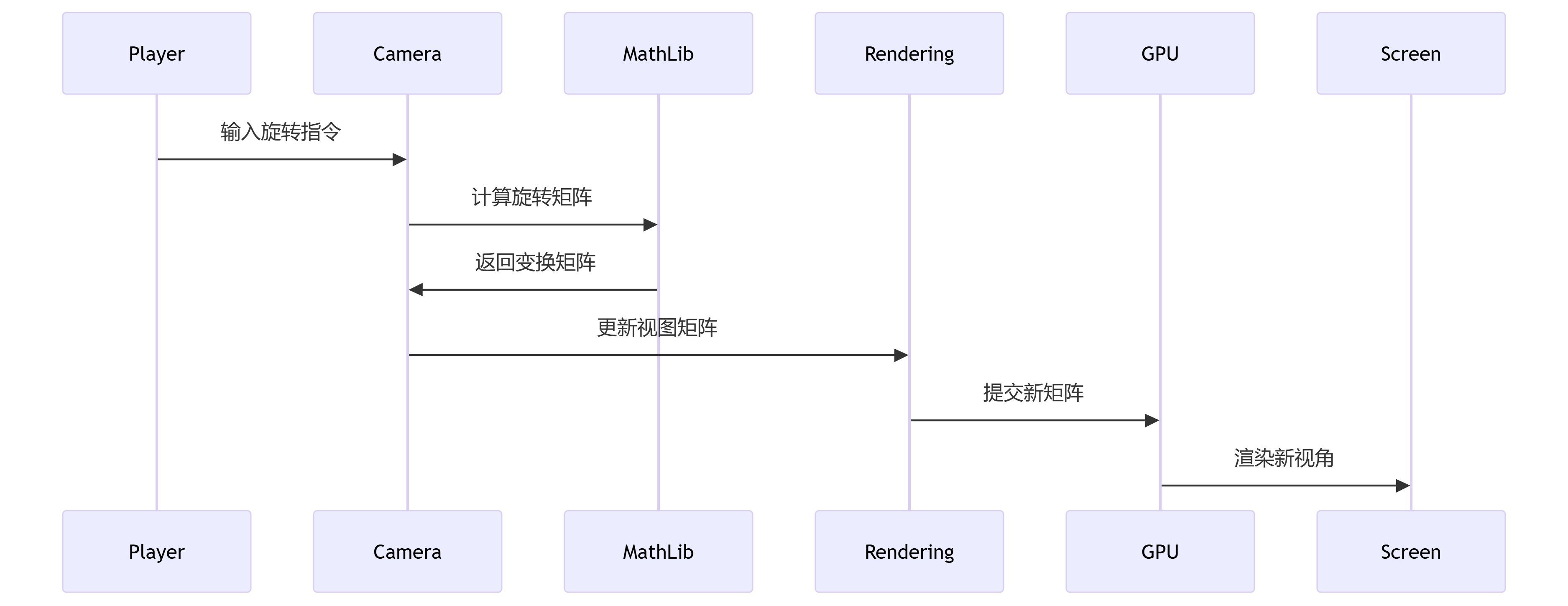
3. 相机运动控制
// 绕焦点旋转(轨道相机)
void CameraManager::RotateCameraByFocus(float fOffsetX, float fOffsetY) {
// 计算旋转矩阵
D3DXMatrixRotationAxis(&matRotZ, &vUp, fRadRotZ);
// 更新相机位置
m_vCameraPos = vPosRealFoc + m_vecCameraFocus;
}
高级相机技术揭秘
1. 相机震动系统
// CameraEditableMotionClipData::RefreshPerlinOffset
void RefreshPerlinOffset(D3DXVECTOR3 &vecOffset, qreal dCurrentFrame) {
float fAlpha = m_fPerlinNoiseRandValue + m_fPerlinNoiseFrequency * fPercentComplete;
float x = PerlinNoise::NoiseNormalized(fAlpha + 1000.f, 1000.f + fAlpha);
float z = PerlinNoise::NoiseNormalized(fAlpha, 0.0f);
// 应用阻尼系数
vecOffset.x = sin(...) * fDamper * m_fPerlinNoiseStrength * x;
vecOffset.z = sin(...) * fDamper * m_fPerlinNoiseStrength * z;
}柏林噪声 vs 传统曲线震动:
| 技术 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 柏林噪声 | 自然随机,永不重复 | 计算开销大 | 爆炸、地震 |
| 曲线震动 | 性能高效,完全可控 | 效果机械 | 脚步震动、机械振动 |
2. 多相机混合渲染
// SceneManager::SceneRender
GLOBAL_RENDER_ADAPTER->SceneExtraRender3DEditor(...);
CMyBitmap::Begin3D();
// 主场景渲染
m_pCurrentScene->Get()->Process();
// 前景叠加
ShowFrontgroundPic();
CMyBitmap::End3D();渲染管线流程:
1. 清除缓冲区
2. 渲染背景层
3. 3D主场景渲染
4. 后期处理效果
5. UI界面渲染
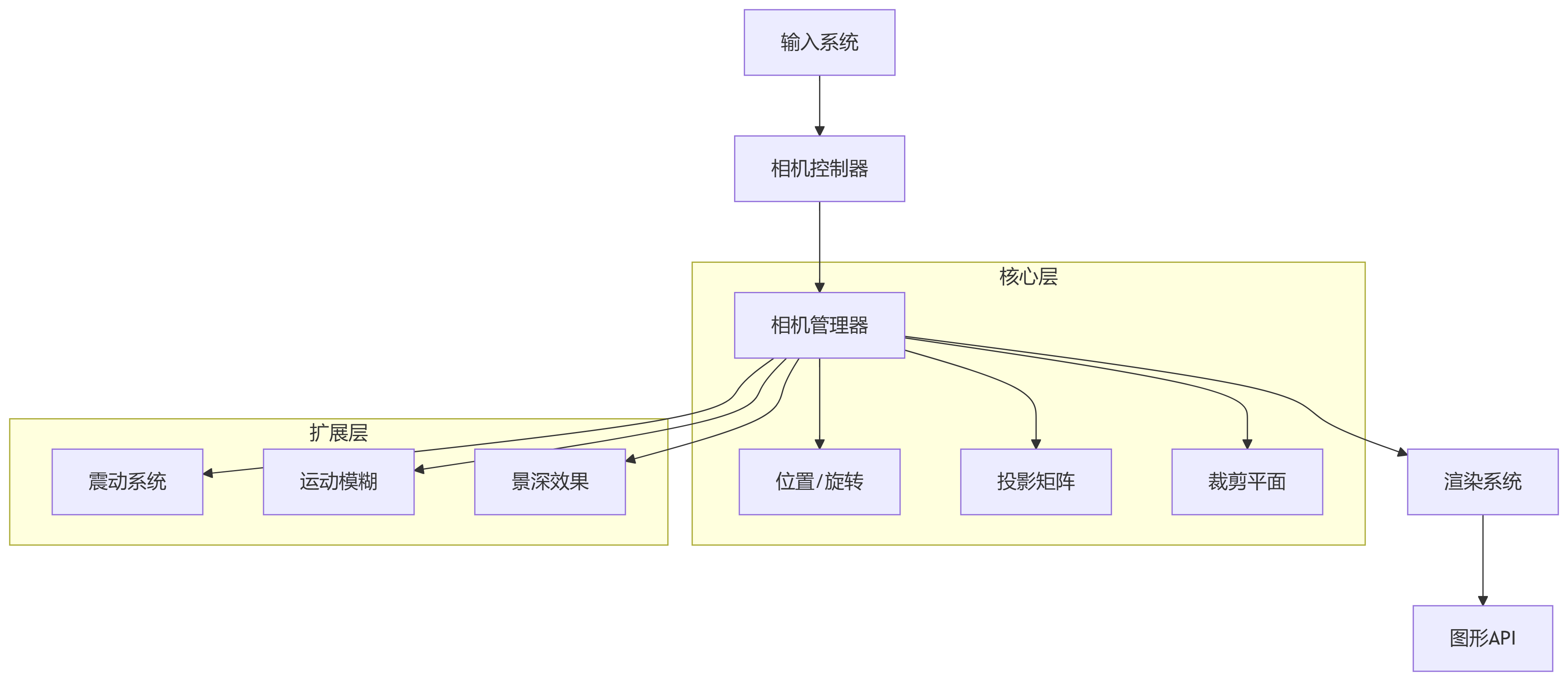
6. 交换缓冲区相机系统设计哲学
1. 分层架构设计
2. 数据驱动设计
// 相机震动配置文件
{
"CameraShakeMode": 1,
"NoiseFrequency": 20.0,
"NoiseStrength": 50.0,
"FrameLength": 30
}性能优化技巧
-
矩阵计算优化:
// 使用SIMD指令加速矩阵运算
__m128 row1 = _mm_load_ps(&mat._11);
__m128 row2 = _mm_load_ps(&mat._21);
__m128 row3 = _mm_load_ps(&mat._31);
__m128 row4 = _mm_load_ps(&mat._41);
-
视锥体裁剪:
// 计算物体是否在视锥体内
bool IsInFrustum(const BoundingBox& bbox) {
for (int i = 0; i < 6; ++i) {
if (PlaneDot(planes[i], bbox.GetPositiveVertex(planes[i])) < 0)
return false;
}
return true;
}
-
LOD与相机距离联动:
// 根据距离选择不同精度模型
float dist = Distance(cameraPos, objectPos);
if (dist < 50.0f) return HIGH_LOD;
else if (dist < 100.0f) return MEDIUM_LOD;
else return LOW_LOD;
实战:实现第一人称相机
class FPScamera : public CameraManager {
public:
void Update(float yaw, float pitch) {
// 计算前向向量
forward.x = cos(yaw) * cos(pitch);
forward.y = sin(pitch);
forward.z = sin(yaw) * cos(pitch);
// 计算右向量
right = cross(forward, worldUp);
// 更新相机位置
m_vCameraAt = m_vCameraPos + forward;
}
private:
D3DXVECTOR3 forward;
D3DXVECTOR3 right;
const D3DXVECTOR3 worldUp = {0,1,0};
};移动处理流程:
W按键 -> 向前向量 * 速度 -> 更新相机位置
鼠标移动 -> 计算偏航/俯仰角 -> 更新朝向向量未来:智能相机系统
-
AI驱动相机:
-
自动构图算法
-
情感识别调整镜头语言
-
动态镜头轨迹生成
-
-
物理模拟镜头:
// 模拟真实镜头惯性 void UpdateInertia(float deltaTime) { angularVelocity += (targetRotation - currentRotation) * stiffness; angularVelocity *= damping; currentRotation += angularVelocity * deltaTime; } -
AR混合现实相机:
-
SLAM实时定位
-
光影一致性匹配
-
物理碰撞检测
-
结语:相机即导演
在3D游戏开发中,相机系统如同电影导演:
-
决定玩家"看什么"(视锥体裁剪)
-
决定"怎么看"(镜头语言)
-
控制叙事节奏(镜头运动)
"优秀的相机系统让玩家忘记技术的存在,沉浸在虚拟世界的真实体验中"
通过深入理解相机工作原理,开发者能够:
-
创造更具沉浸感的游戏体验
-
优化渲染性能
-
实现创新的游戏机制
-
为VR/AR开发奠定基础
相机技术不仅是3D游戏的基石,更是连接现实与虚拟的魔法桥梁。掌握这门艺术,你将真正成为虚拟世界的创造者。