自动驾驶控制算法------纯跟踪法(Pure Pursuit)
文章目录
- [自动驾驶控制算法------纯跟踪法(Pure Pursuit)](#自动驾驶控制算法——纯跟踪法(Pure Pursuit))
- 一、纯跟踪法是什么?
-
- [1.1 定义与核心思想](#1.1 定义与核心思想)
- [1.2 纯跟踪法与其他控制器的区别](#1.2 纯跟踪法与其他控制器的区别)
- [1.3 自动驾驶中纯跟踪法的典型应用场景](#1.3 自动驾驶中纯跟踪法的典型应用场景)
- 二、纯跟踪法的原理
-
- [2.1 闭环结构总览:纯跟踪控制器如何作用于系统?](#2.1 闭环结构总览:纯跟踪控制器如何作用于系统?)
- [2.2 预瞄模型:构建几何圆弧连接模型](#2.2 预瞄模型:构建几何圆弧连接模型)
-
- [2.2.1 车辆运动学模型(Kinematic Bicycle Model)](#2.2.1 车辆运动学模型(Kinematic Bicycle Model))
- [2.2.2 圆弧几何关系](#2.2.2 圆弧几何关系)
- [2.3 控制公式推导:纯跟踪法是怎么"转向"的?](#2.3 控制公式推导:纯跟踪法是怎么“转向”的?)
-
- [2.3.1 预瞄距离 L d L_d Ld 的定义与作用](#2.3.1 预瞄距离 L d L_d Ld 的定义与作用)
- [2.3.2 航向误差角 α \alpha α 的定义与作用](#2.3.2 航向误差角 α \alpha α 的定义与作用)
- [2.3.3 前轮转角公式推导](#2.3.3 前轮转角公式推导)
- [2.3.4 可视化理解](#2.3.4 可视化理解)
- [2.4 预瞄距离 L d L_d Ld 的设计原则](#2.4 预瞄距离 L d L_d Ld 的设计原则)
-
- [2.4.1 固定预瞄距离](#2.4.1 固定预瞄距离)
- [2.4.2 自适应预瞄距离](#2.4.2 自适应预瞄距离)
- [2.4.3 预瞄距离对性能的影响](#2.4.3 预瞄距离对性能的影响)
- 三、纯跟踪法的控制流程
-
- [3.1 控制流程结构图](#3.1 控制流程结构图)
- [3.2 每一时刻的完整工作步骤](#3.2 每一时刻的完整工作步骤)
- [3.3 工作流程的优缺点总结](#3.3 工作流程的优缺点总结)
- 小结
- 四、纯跟踪法的参数设计与改进
-
- [4.1 预瞄距离 L d L_d Ld 的优化](#4.1 预瞄距离 L d L_d Ld 的优化)
-
- [4.1.1 固定预瞄距离](#4.1.1 固定预瞄距离)
- [4.1.2 自适应预瞄距离](#4.1.2 自适应预瞄距离)
- [4.1.3 曲率相关的预瞄距离](#4.1.3 曲率相关的预瞄距离)
- [4.2 几何模型的改进](#4.2 几何模型的改进)
-
- [4.2.1 考虑车辆横向偏移量](#4.2.1 考虑车辆横向偏移量)
- [4.2.2 多点预瞄策略](#4.2.2 多点预瞄策略)
- [4.2.3 三维路径跟踪](#4.2.3 三维路径跟踪)
- [4.3 与其他控制器的融合](#4.3 与其他控制器的融合)
-
- [4.3.1 与 PID 融合](#4.3.1 与 PID 融合)
- [4.3.2 与 MPC 融合](#4.3.2 与 MPC 融合)
- [4.3.3 与速度规划器协同](#4.3.3 与速度规划器协同)
- [4.4 参数设计的实际建议(自动驾驶应用)](#4.4 参数设计的实际建议(自动驾驶应用))
一、纯跟踪法是什么?
1.1 定义与核心思想
纯跟踪法(Pure Pursuit) 是一种基于几何原理的路径跟踪控制算法。其核心思想是:
在车辆当前位置沿参考路径前方一定距离处(称为"预瞄距离" LdL_dLd)选择一个目标点,车辆通过计算一个圆弧轨迹,使得前轮转向朝向该目标点,从而逐步逼近并跟随参考路径。
这一方法的本质是几何追踪(Geometric Pursuit):
- 车辆并不直接修正与路径的横向误差,而是不断追逐路径上的移动目标点;
- 控制量(前轮转角 δ \delta δ)由车辆与该预瞄点之间的几何关系直接计算,无需显式优化求解。
核心优点:
- 实现简单、计算速度快、易于嵌入式部署;
- 对车辆动力学模型依赖较低,适合低速与中速路径跟踪。
1.2 纯跟踪法与其他控制器的区别
为了更好地理解纯跟踪法,可以将其与几种常见的路径跟踪控制方法进行对比:
| 方法 | 控制原理 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| 纯跟踪法 | 基于几何圆弧拟合,追踪前方预瞄点 | 简单、快速、对模型依赖低 | 精度受预瞄距离影响大,高速急弯易偏差 | 低速自动驾驶、AGV、机器人导航 |
| Stanley 方法 | 基于横向误差与航向误差反馈 | 在高速公路表现好,控制更精确 | 实现比纯跟踪法复杂 | 高速公路自动驾驶 |
| PID 控制 | 基于比例、积分、微分调节误差 | 实现简单,易理解 | 参数整定敏感,抗扰性差 | 简单路径跟踪 |
| MPC 控制 | 预测未来状态并优化控制量 | 精度高,可处理约束 | 计算量大,实时性差 | 高速/复杂工况的轨迹跟踪 |
核心差异总结:
- 驱动方式不同 :纯跟踪法是几何驱动 ,Stanley/MPC 是误差驱动 或优化驱动;
- 计算复杂度不同:纯跟踪法几乎不做优化,计算量低;MPC 需要实时求解优化问题;
- 适用速度区间不同:纯跟踪法在低速场景下稳定性好,高速急转时精度不足。
1.3 自动驾驶中纯跟踪法的典型应用场景
纯跟踪法因其结构简单、易于实现,常作为自动驾驶与机器人领域的基准路径跟踪方法(baseline),具体应用包括:
- 轨迹跟踪控制(Trajectory Tracking)
- 在预设轨迹(如仿真路径、SLAM 建图路径)下行驶
- 低速和中速条件下效果好
- 车道保持与变道决策(Lane Keeping / Changing)
- 在已知车道线信息下,通过连续选取预瞄点保持在车道中心
- 适合中低速城市道路巡航
- 低速自主泊车
- 跟随预设泊车路径倒车或前进,路径曲率变化较小
- AGV 与移动机器人导航
- 在工业园区、仓储环境中通过磁条/二维码导航的车辆路径跟随
- 无人小车竞赛
- 常用作入门路径跟踪算法进行快速原型开发
纯跟踪法是路径跟踪领域中最经典的几何控制算法之一,其核心是通过预瞄点+几何圆弧计算来获得转向控制量。由于实现简单、计算开销低,它被广泛应用于低速和中速自动驾驶、机器人导航等场景,并常作为控制算法性能对比的基准方法。
二、纯跟踪法的原理
2.1 闭环结构总览:纯跟踪控制器如何作用于系统?
纯跟踪法属于闭环路径跟踪控制 。在每个控制周期内,它根据车辆当前状态与参考路径的几何关系,计算出一个转向控制量(前轮转角 δ \delta δ),并作用于车辆执行器,使车辆逐步逼近目标路径。
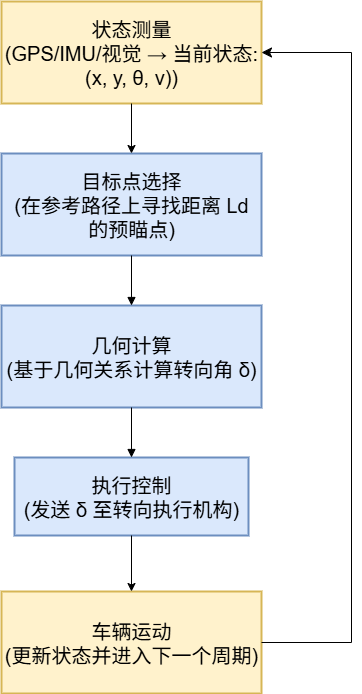
闭环信息流:
- 状态测量 :车辆通过定位系统(GPS/IMU/视觉)获取当前状态 ( x , y , θ , v ) (x, y, \theta, v) (x,y,θ,v)
- 目标点选择 :在参考路径上寻找与当前车辆位置相距 L d L_d Ld 的预瞄点
- 几何计算 :基于车辆与目标点的几何关系,计算所需转向角 δ \delta δ
- 执行控制 :将 δ \delta δ 发送给转向执行机构
- 车辆运动:车辆状态更新,进入下一个控制周期
2.2 预瞄模型:构建几何圆弧连接模型
2.2.1 车辆运动学模型(Kinematic Bicycle Model)
纯跟踪法通常基于单轨(自行车)运动学模型进行几何推导:
{ x ˙ = v cos θ y ˙ = v sin θ θ ˙ = v L tan δ \begin{cases} \dot{x} = v \cos\theta \\ \dot{y} = v \sin\theta \\ \dot{\theta} = \frac{v}{L} \tan\delta \end{cases} ⎩ ⎨ ⎧x˙=vcosθy˙=vsinθθ˙=Lvtanδ
其中:
- x , y x, y x,y:车辆质心坐标
- θ \theta θ:航向角
- v v v:车速
- L L L:车辆轴距
- δ \delta δ:前轮转角
2.2.2 圆弧几何关系
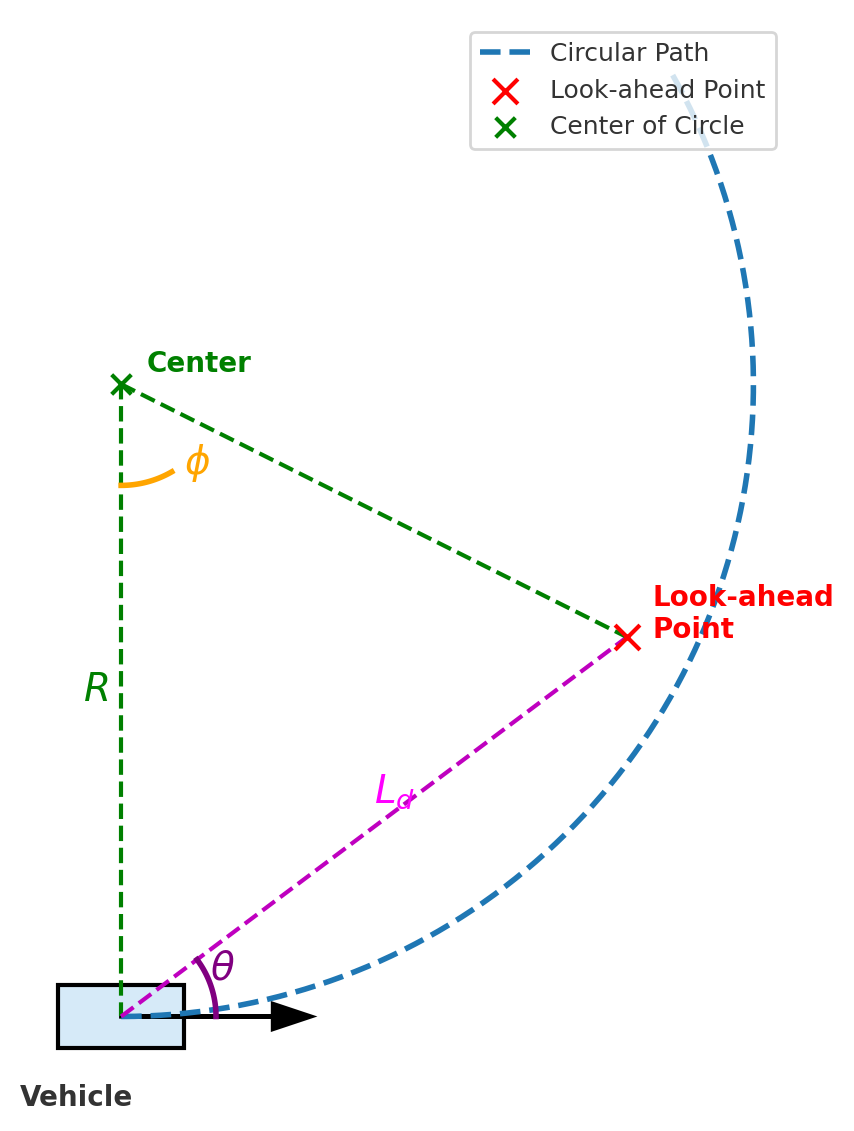
在纯跟踪法中,假设车辆当前状态与目标预瞄点之间可以用一段圆弧轨迹连接:
- 圆弧半径 R R R 决定转向曲率
- 车辆前轮转角 δ \delta δ 与半径关系为:
R = L sin ϕ R = \frac{L}{\sin\phi} R=sinϕL
其中 ϕ \phi ϕ为前轮转动后的偏移角度
几何核心思想:车辆不断调整转向,使行驶轨迹的圆弧中心与预瞄点连成的圆弧相同。
2.3 控制公式推导:纯跟踪法是怎么"转向"的?
2.3.1 预瞄距离 L d L_d Ld 的定义与作用
- 定义:车辆当前位置到预瞄点沿路径的弧长距离
- 作用:决定车辆对未来路径的"关注程度",影响转向灵敏度与跟踪稳定性
2.3.2 航向误差角 α \alpha α 的定义与作用
- α \alpha α:车辆当前朝向与车辆到预瞄点的连线方向之间的夹角
- 决定了车辆需要转动多少方向才能指向预瞄点
2.3.3 前轮转角公式推导
由几何关系可得:
δ = tan − 1 ( 2 L sin α L d ) \delta = \tan^{-1}\left(\frac{2L \sin\alpha}{L_d}\right) δ=tan−1(Ld2Lsinα)
推导过程:
- 根据预瞄点坐标,计算车辆与预瞄点之间的相对位置 ( x t , y t ) (x_t, y_t) (xt,yt)
- 计算连线方向与车身方向的夹角 α \alpha α
- 根据圆弧轨迹几何关系,得到转向半径 R = L d 2 sin α R = \frac{L_d}{2\sin\alpha} R=2sinαLd
- 结合单轨模型公式 δ = tan − 1 ( L / R ) \delta = \tan^{-1}(L / R) δ=tan−1(L/R),最终得到上述转向公式
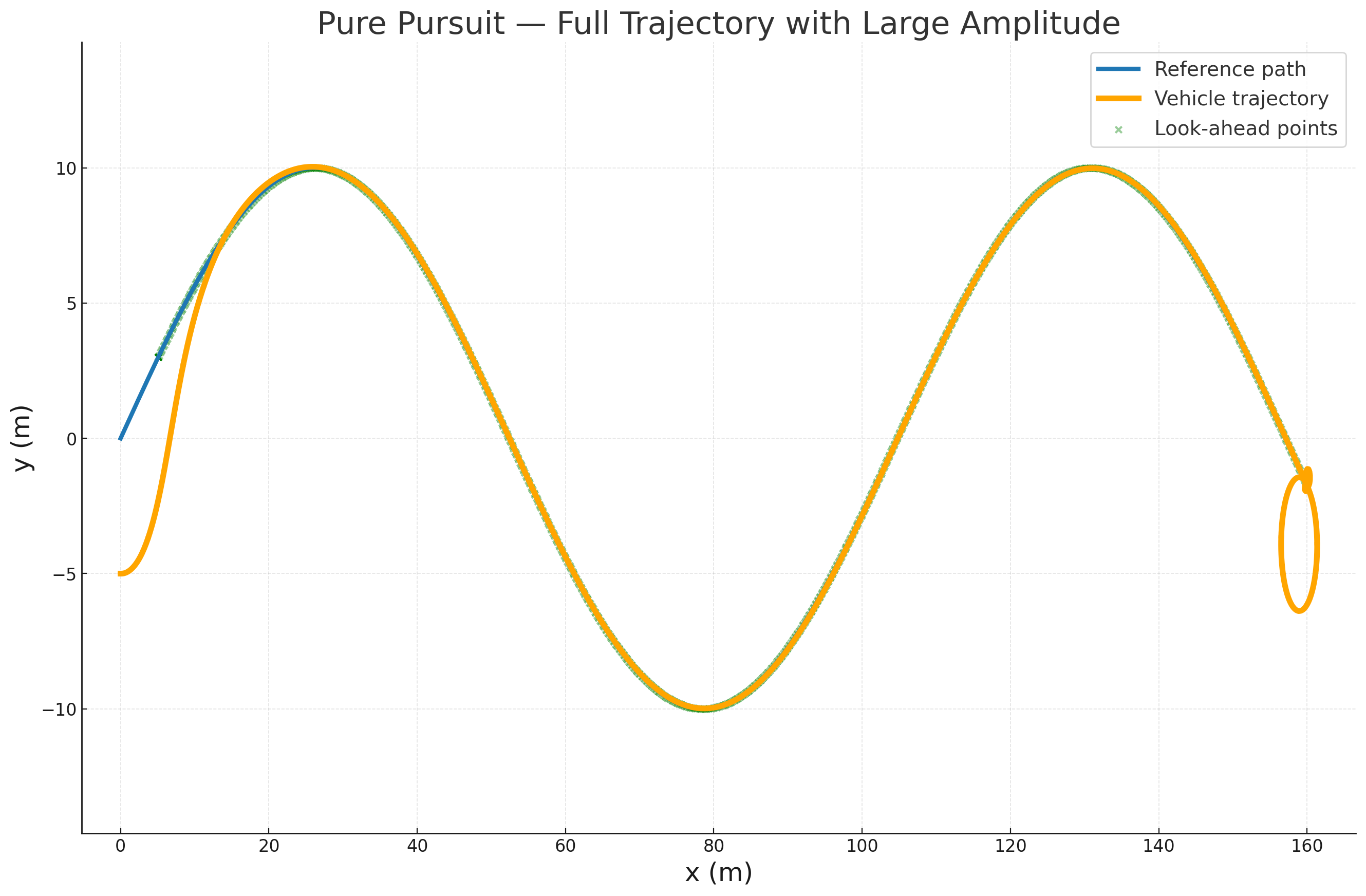
2.3.4 可视化理解
- 小 L d L_d Ld:车辆更"急"地朝向预瞄点,响应快但轨迹容易抖动
- 大 L d L_d Ld:车辆转向平缓,轨迹更平滑但急弯跟踪不佳
2.4 预瞄距离 L d L_d Ld 的设计原则
2.4.1 固定预瞄距离
- 简单易实现
- 适合速度恒定、路线曲率变化不大的场景
2.4.2 自适应预瞄距离
- 根据速度自动调整:
L d = k 1 + k 2 v L_d = k_1 + k_2 v Ld=k1+k2v
- 高速时增大 L d L_d Ld,提升稳定性
- 低速时减小 L d L_d Ld,提高转向灵敏度
2.4.3 预瞄距离对性能的影响
- 过小:容易震荡,尤其在曲率变化快的路径
- 过大:急弯处跟踪误差大,可能"切弯"
纯跟踪法的控制核心是预瞄点选择 + 几何计算转向角。它通过单轨运动学模型和圆弧几何关系,将路径跟踪问题简化为一个直接计算公式,计算量低、实时性好,但其性能高度依赖预瞄距离的设计。
三、纯跟踪法的控制流程
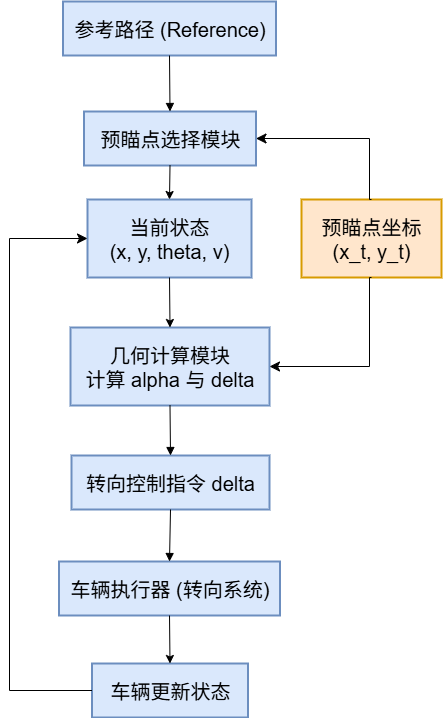
3.1 控制流程结构图
在纯跟踪法中,控制器每个周期会接收车辆当前状态与参考路径数据,选择目标预瞄点,并基于几何关系计算前轮转角,最终驱动车辆执行。其闭环控制结构可用下图表示:
3.2 每一时刻的完整工作步骤
在控制时刻 k k k,纯跟踪法的计算与执行过程可以分为以下 5 步:
Step 1:获取车辆当前状态
- 通过 GPS、IMU、里程计等传感器获取位置 ( x k , y k ) (x_k, y_k) (xk,yk)、航向角 θ k \theta_k θk、车速 v k v_k vk
- 状态信息为预瞄点选择和几何计算提供基础
Step 2:沿参考路径寻找预瞄点
- 在路径点集合中找到与车辆当前位置沿路径方向距离为 L d L_d Ld 的目标点
- 若路径是离散点序列,则可通过累计弧长寻找最近匹配点
Step 3:计算航向误差角 α k \alpha_k αk
- 根据车辆位置和目标点坐标,计算目标点方向与车辆当前航向之间的夹角
- α k = atan2 ( y t − y k , x t − x k ) − θ k \alpha_k = \text{atan2}(y_t - y_k, x_t - x_k) - \theta_k αk=atan2(yt−yk,xt−xk)−θk
Step 4:几何公式求解前轮转角 δ k \delta_k δk
- 使用公式
δ k = tan − 1 ( 2 L sin α k L d ) \delta_k = \tan^{-1} \left( \frac{2L \sin\alpha_k}{L_d} \right) δk=tan−1(Ld2Lsinαk)
- L L L 为车辆轴距
Step 5:发送转向控制指令
- 将 δ k \delta_k δk 发送至车辆转向执行机构
- 车辆状态更新后进入下一时刻 k + 1 k+1 k+1,重复整个流程
3.3 工作流程的优缺点总结
优点
- 实现简单:核心是几何计算,无需求解优化问题
- 计算速度快:适合实时性要求高的嵌入式平台
- 对车辆模型依赖低 :不需要完整的动力学参数,仅需轴距 L L L
- 调参直观 :主要调节预瞄距离 L d L_d Ld
缺点
- 性能依赖预瞄距离 :固定 L d L_d Ld 在高速或急弯下效果可能不佳
- 忽略动力学约束:高速转弯时可能出现不可实现的转角指令
- 对急弯敏感:预瞄点可能位于车辆可达范围之外,导致跟踪误差增大
小结
纯跟踪法的控制流程以**"测量状态 → 选取预瞄点 → 几何计算转角 → 执行转向"**为核心循环,优点是快速简洁,缺点是缺乏对动力学约束和速度适应性的考虑,因此在实际应用中,常需结合速度自适应预瞄距离或与其他控制器(如 PID、MPC)融合以提高精度与稳定性。
四、纯跟踪法的参数设计与改进
4.1 预瞄距离 L d L_d Ld 的优化
预瞄距离是纯跟踪法中最核心的调节参数,直接影响控制性能、稳定性和跟踪精度。
4.1.1 固定预瞄距离
- 定义 :在整个行驶过程中保持 L d L_d Ld 不变
- 优点:实现简单,计算稳定
- 缺点:无法兼顾不同速度和曲率条件下的跟踪需求
- 适用场景:低速、曲率变化小的路径(如仓储 AGV)
4.1.2 自适应预瞄距离
为了兼顾低速灵敏度与高速稳定性,常采用速度相关的预瞄距离设计:
L d = k 1 + k 2 v L_d = k_1 + k_2 v Ld=k1+k2v
其中:
- v v v:当前车辆速度
- k 1 , k 2 k_1, k_2 k1,k2:调节系数
- 作用 :高速时增大 L d L_d Ld(稳定性提升),低速时减小 L d L_d Ld(灵敏度提升)
4.1.3 曲率相关的预瞄距离
- 根据参考路径的局部曲率 κ \kappa κ 调节 L d L_d Ld:
L d = min ( L max , max ( L min , f ( κ ) ) ) L_d = \min(L_{\max}, \max(L_{\min}, f(\kappa))) Ld=min(Lmax,max(Lmin,f(κ)))
- 在急弯( κ \kappa κ 大)时减小 L d L_d Ld,在直道时增大 L d L_d Ld
4.2 几何模型的改进
虽然传统纯跟踪法基于单轨几何模型即可实现路径跟踪,但在某些场景中可进行扩展:
4.2.1 考虑车辆横向偏移量
- 在几何计算中引入横向误差补偿项,使转向角不仅指向预瞄点,还补偿横向距离
- 类似 Stanley 方法的思想,可增强曲率变化处的跟踪精度
4.2.2 多点预瞄策略
- 同时选择多个预瞄点(短距+长距),综合计算转向角:
- 短距点保证曲率响应
- 长距点保证路径平滑性
- 通过加权平均得到最终转向角:
δ = w 1 δ short + w 2 δ long \delta = w_1 \delta_{\text{short}} + w_2 \delta_{\text{long}} δ=w1δshort+w2δlong
4.2.3 三维路径跟踪
- 针对无人机、无人船等需要在三维空间跟踪路径的场景,将预瞄点选择和几何计算扩展至三维坐标系
- 考虑俯仰角、滚转角等控制变量
4.3 与其他控制器的融合
在高速或复杂路况下,纯跟踪法单独使用可能不足以满足精度和稳定性要求,因此可与其他控制方法融合:
4.3.1 与 PID 融合
- 纯跟踪法输出的转向角作为基准值
- PID 控制器修正横向误差,补偿纯跟踪法对急弯的响应不足
4.3.2 与 MPC 融合
- MPC 预测未来路径,并将预测的最优转向序列的首个值作为纯跟踪法的预瞄目标
- 纯跟踪法提供快速几何计算,MPC 提供预测优化能力
4.3.3 与速度规划器协同
- 根据路径曲率和道路条件,动态调整车速,使预瞄距离和速度匹配
- 例如:急弯自动减速,直道自动加速
4.4 参数设计的实际建议(自动驾驶应用)
- 预瞄距离:建议在低速(<10 km/h)时取 2--3 m,高速时取 10--15 m,并随速度连续调整
- 调参顺序 :先固定 k 1 k_1 k1 调整 k 2 k_2 k2,保证高速稳定性,再回调 k 1 k_1 k1 提升低速灵敏度
- 曲率适配 :在急弯处通过路径曲率自适应调整 L d L_d Ld
- 横向偏差补偿:在直道稳定性良好的情况下,可加入横向误差反馈提升精度