一基本概念:
GPlO :Genral Purpose Input/Output,GPIO是51单片机和外界交互最基本的方式
工作模式:
输出模式: 单片机给定引脚一个电平(高电平(5V)低电平(0V)),控制引脚实现高低电平
输入模式 :检测引脚电平变化
类比GPIO为 水龙头:
输出模式:控制水龙头(水流)
输入模式:观察水龙头是否有水流**(按键)**
二 按键:
按键K1,两个引脚被接到GND和P14引脚,当K1按被技下时,P14引|脚会和GND短路到一起,P14引脚即会呈现低电平
判断按键是否被按下:只需要检测对应的引即是否为低电平
P14 引脚是否为低电平?P1 初始化全为1, (P1 & 0001 0000) == 0 说明P14 引脚是为低电平,按键1被按下。
cpp
#include <reg51.h>
//初始化是P1高四位和P35置1
void Key_Init(void)
{
P1 |= (0xF0 << 0);
P3 |= (1 << 5);
return ;
}
//检测是否有按键按下
int Key_Press(void)
{
//初始化P1全为1 若有按键按下,则说明按位与不为0
int ret = 0;
//把1放在第 4bit 位置 通过这种方式定位到具体按键
if ((P1 & (1 << 4)) == 0)//注意加括号 关系运算符优先级高于位运算符
{
ret = 1;
}
else if ((P1 & (1 << 5)) == 0)
{
ret = 2;
}
else if ((P1 & (1 << 6)) == 0)
{
ret = 3;
}
else if ((P1 & (1 << 7)) == 0)
{
ret = 4;
}
else if ((P3 & (1 << 5)) == 0)
{
ret = 5;
}
return ret;
}三、中断:
1.中断概念:CPU在执行一个任务时,被外界更为紧急的事件打断,转而去执行更为紧急的任务,执行完后再回到刚才的地方继续向下执行,这一过程叫做中断
2.中断源:打断CPU执行当前任务的事件/源头叫做中断源(51单片机只有5个中断源)
3中断源分类:外部中断0,外部中断1,定时器0,定时器1,串口
4外部中断:单片机上的引脚电平变化所引起的中断(INT0(P3-2)、INT1(P3-3))
5.中断优先级:CPU再去处理中断任务时候,会去比较多个中断的优先级,优先去处理优先级高的中断
6.中断嵌套:处理一个中断时,再套另外的中断:51单片机只允许嵌套2层
7.中断处理流程:
- (1) 中断源发出中断请求
- (2)检查CPU是否响应中断及该中断源是否被屏蔽
- (3)比较中断优先级
- (4) 保护现场
- (5)执行中断服务函数 (回调函数)
- (6)恢复现场
四、中断相关寄存器配置:
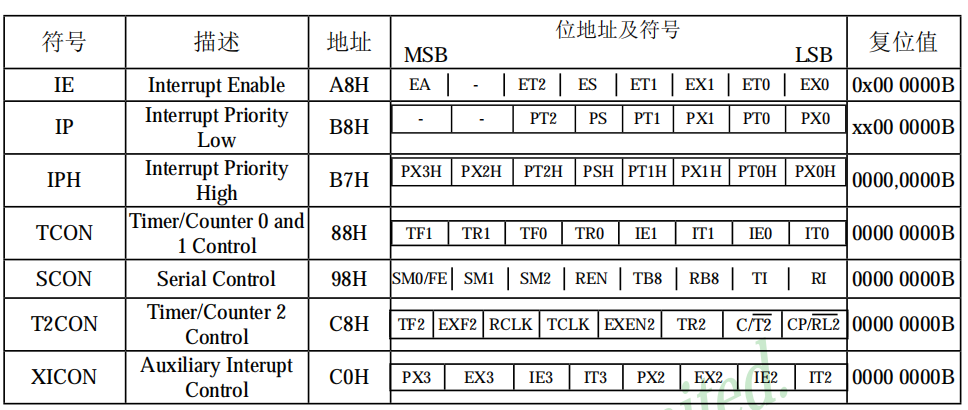
1 IE寄存器(中断允许寄存器)

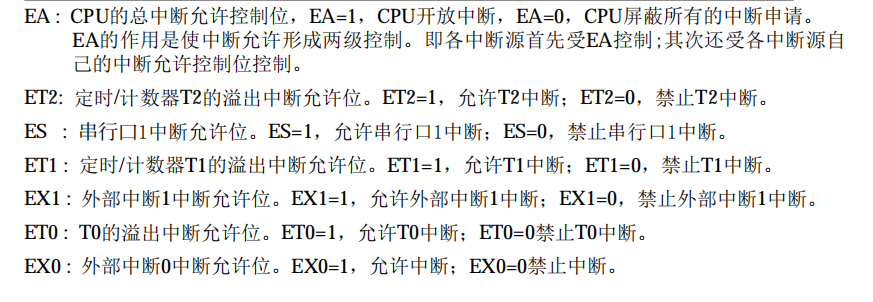
(1)将IE寄存器中的bit7,EA置1,代表CPU能够响应所有中断
(2)将IE寄存器中的bit0,EX0置1,代表允许外部中断0产生中断
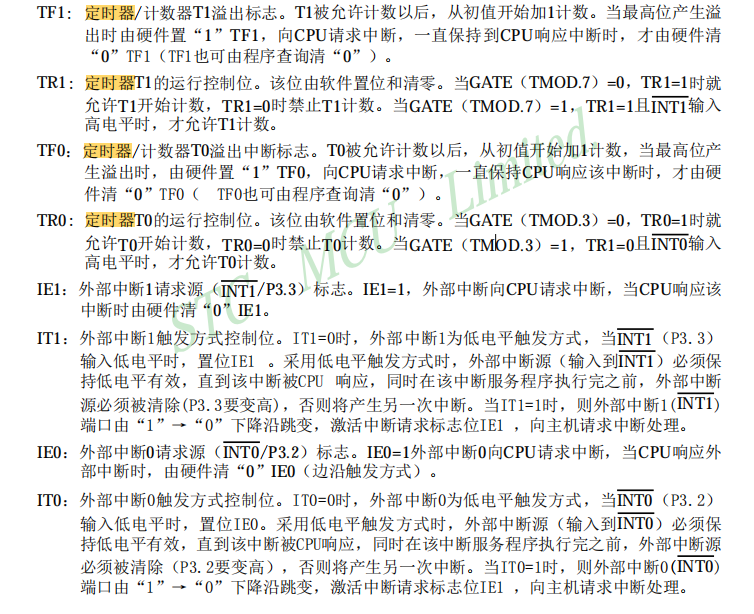
2.TCON寄存器(定时器寄存器)

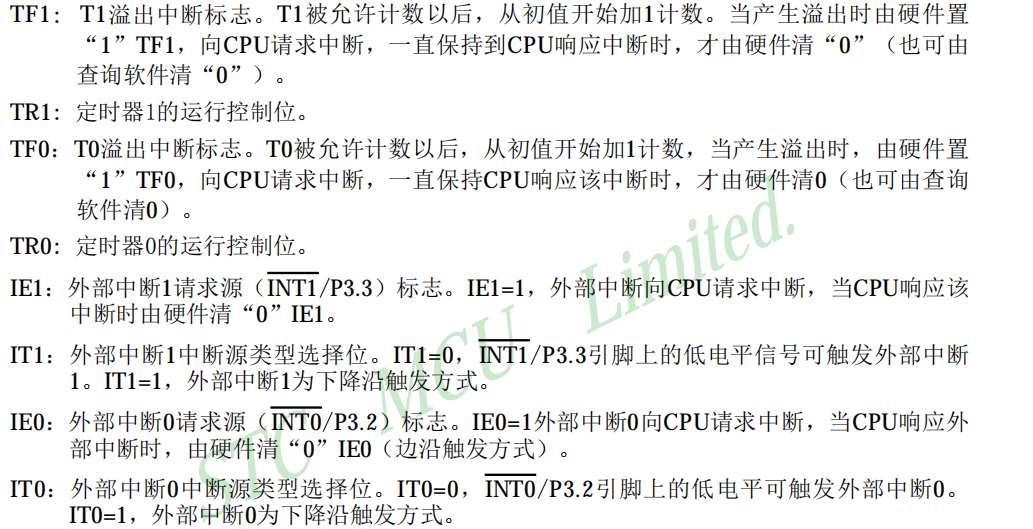
(1)将TCON寄存器的bit1,IE0置1,代表向CPU发起中断请求,CPU响应完中断请求后,硬件清"0"
(2)将TCON寄存器的bit0,IT0置1,代表外部中断0下降沿触发中断
五、定时器
- **定时器:**能够产生一个精准的定时,不同外设对时序的要求高(高电平和低电平时间是精准的)
- 51单片机内部有两个定时器,分别为timer0、timer1 ,所使用自增型定时器(计数器16位:0-65535)
- Clock,时钟,CPU运行节拍,频率(Intel2.1GHZ)
- 频率单位:HZ
- 时间单位:S
- 频率和时间关系:1/2.1GHZ ns(hz-s khz -ms Mhz-us Ghz-ns)
51单片机:
- 晶振,晶体振荡器(12MHZ or 11.059MHZ)
- 51单片机达不到12MHZ,将12MHZ进行12分频,12MHZ/12 = 1MHZ(机器实际使用)
- 51单片机完成一条指令运算:1/1MHZ=1uS
- ex:通过定时器0实现1ms定时:
- 1ms = 1000us,定时器溢出是计数器16位占满总共是65535次运算, 一条指令运算需要1us,花费时间1000us刚好溢出,即进行1000次运算,定时器初值:64535。
六、定时器相关寄存器配置:
8位自动重装载定时器:分为TLO和THO两部分,1byte,实际参与计数的只有TLO,当TLO中的值加到255溢出后,再将THO中的值重新装入到TLO中
TCON寄存器:
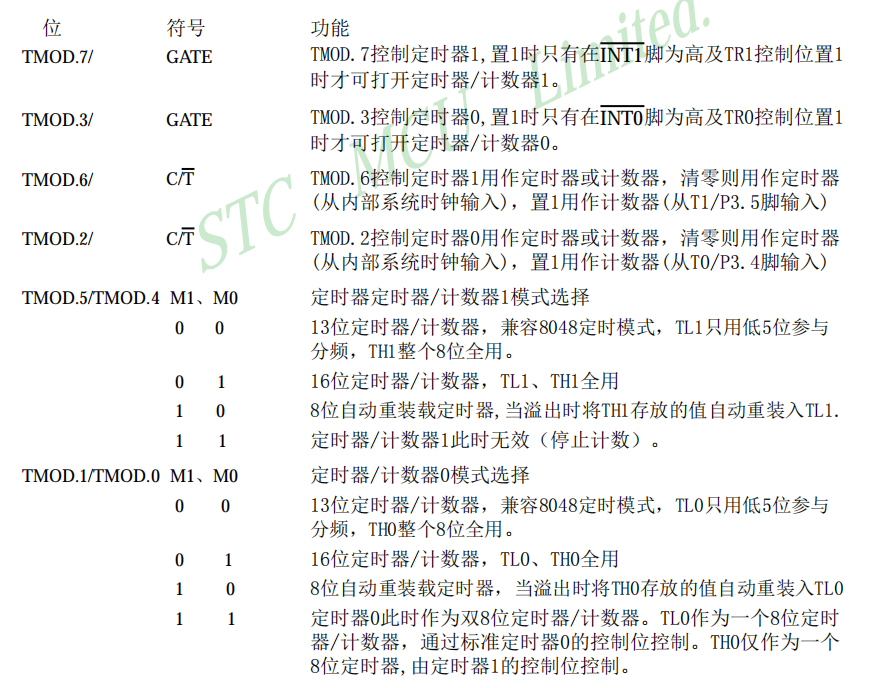
(1)bit4置1,TMOD寄存器中的Gate位清0,代表允许定时器开始计数
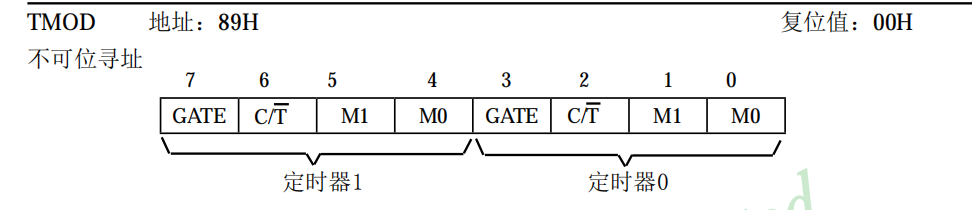
TMOD寄存器:
(1)定时器0>低四位清0
(2)将TMOD寄存器中的M0,bit0置1,代表定时器0工作在16位定时器/计数器模式
工作模式寄存器
IE寄存器:
(1)将IE寄存器中的bit7置1,代表CPU能够响应所有中断
(2)将IE寄存器中的bit1置1,代表允许定时器0产生中断
cpp
#include <reg51.h>
#include "led.h"
unsigned int g_i = 0;
//定时器中断服务函数
void Timer0_Handler(void) interrupt 1
{
TH0 = 64535 >> 8;
TL0 = 64535; //溢出之后,下一次进入这个函数 定时器得重新赋初始值
g_i++;
if(g_i >= 1000)//1000ms执行一次中断处理函数 执行1000次才执行led反转 即1s
{
LED_NOR();
g_i = 0;
}
return;
}
//定时器0初始化函数
void Timer0_Init(void)
{
//配置定时器0工作模式寄存器
TMOD &= ~(0x0F << 0);//TMOD寄存器低四位清零
TMOD |= (1 << 0);//TMOD bit0 M0置1 工作在16位定时器模式
//补充一点:TMOD bit2 C/T 置0是定时器 置1为计数器 这里初始化低四位清零正好赋值0
//配置16位定时器的高八位和低八位
TH0 = 64535 >> 8;//64535是16位数据,右移八位正好把高八位赋值给TH0;
TL0 = 64535;// 64535是16位数据,多位数据赋值给少位数据,优先赋值低位
//定时1000ms:执行一次指令需要1ms 起点64535 执行1000次 65535计数溢出 触发中断函数
//配置定时器0中断控制寄存器
TCON |= (1 << 4);//配合TMOD bit3 GATE置0,TCON bit4 TR0置1 表示允许定时器T0开始计数
//配置定时器0中断允许寄存器
IE |= (1 << 7)|(1 << 1); //运行CPU响应中断(总开关)以及定时器0产生中断(子开关)
}流程:
-
先配置TMOD模式选择寄存器,将低四位清0,再将bit0置1代表工作在16位定时器
-
向TH0和TL0中装入定时器的初值(1ms -> 64535)
-
将TCON寄存器中的bit6置1,代表允许定时器开始计数
-
将IE寄存器中的bit7和bit1置1,开启中断总开关和定时器0的子开关
-
编写定时器0的中断服务函数
七、蜂鸣器、PWM:
PWM:
- 脉冲宽度调制,能够让引脚产生一个方波,周期性的让引脚的电平发生翻转
- PWM周期:一个方波所经历的周期(从上升沿到上升沿所经历的时间/从下降沿到下降沿所经历的时间)
- PWM占空比:在一个周期内高电平所占的比例
蜂鸣器:
- 震荡源 -> 声音(波)-> 音调不同 -> 波的频率发生变化 -> 高音 高频 低音 低频
- 音量不同 -> 波的振幅 -> 能量
- 有源蜂鸣器:存在震荡源,通电后蜂鸣器会发出持续频率的声音
- **无源蜂鸣器:**不存在震荡源,通电后蜂鸣器不会发出声音,需要给蜂鸣器一个震荡
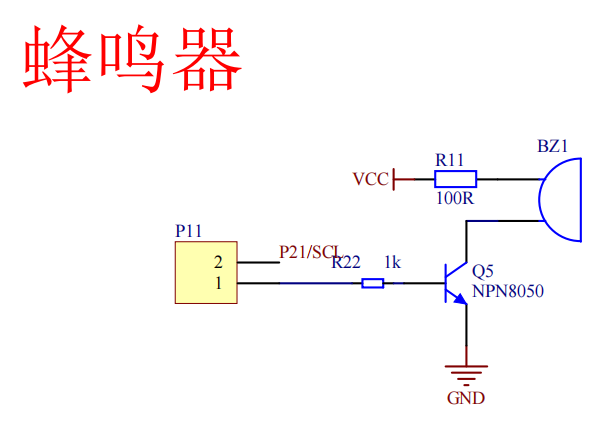
原理:P11高电平,NPN基极高电平,发射极接地,NPN导通,集电极电电压接近0,BZ1一端VCC高电平,一端低电平,导通,蜂鸣器响;同理P11低电平,NPN基极低电平,发射极接地,NPN不导通,集电极高阻态电压很高,BZ1一端VCC高电平,一端高电平,没有电压差不导通,蜂鸣器不响。(无源蜂鸣器:需要给蜂鸣器一个震荡,PWM方波)
如何计算:
200hz (周期的倒数,周期代表从高电平到下一高电平的时间)
50%的占空比(高电平占一周期的比例)
蜂鸣器200hz--->周期为0.005s---->高电平周期---->0.0025s------>定时器定时0.0025s
晶振12GHZ------>12分频供给使用 ---->机器周期频率1GHZ---->1000000HZ----->执行一次指令需要1us----->定时器定时0.0025s需要执行------>2500次------>65535计数器溢出----->因此初始值为63035
cpp
#include <reg51.h>
#include "led.h"
unsigned int g_i = 0;
//定时器中断服务函数
void Timer0_Handler(void) interrupt 1
{
TH0 = g_i >> 8;
TL0 = g_i; //溢出之后,下一次进入这个函数 定时器得重新赋初始值
g_i++;
P2 ^= (1 << 1);//P21引脚置1置0 来回翻转
return;
}
//定时器0初始化函数
void Timer0_Init(void)
{
//配置定时器0工作模式寄存器
TMOD &= ~(0x0F << 0);//TMOD寄存器低四位清零
TMOD |= (1 << 0);//TMOD bit0 M0置1 工作在16位定时器模式
//补充一点:TMOD bit2 C/T 置0是定时器 置1为计数器 这里初始化低四位清零正好赋值0
//配置16位定时器的高八位和低八位
TH0 = g_i >> 8;//64535是16位数据,右移八位正好把高八位赋值给TH0;
TL0 = g_i;// 64535是16位数据,多位数据赋值给少位数据,优先赋值低位
//定时1000ms:执行一次指令需要1ms 起点64535 执行1000次 65535计数溢出 触发中断函数
//配置定时器0中断控制寄存器
TCON |= (1 << 4);//配合TMOD bit3 GATE置0,TCON bit4 TR0置1 表示允许定时器T0开始计数
//配置定时器0中断允许寄存器
IE |= (1 << 7)|(1 << 1); //运行CPU响应中断(总开关)以及定时器0产生中断(子开关)
}重点:
1GPIO输入模式、输出模式
-
按键工作原理(GPIO输入)
-
中断概念
-
中断源概念、中断源个数、哪几个中断源
-
外部中断、定时器中断概念
-
中断处理流程
-
51单片机中定时器的个数?类型
-
16位定时器和8位自动重装载定时器的区别
-
PWM的概念、PWM周期、PWM占空比
10、有源蜂鸣器和无源蜂鸣器的区别
11、51单片机蜂鸣器实现原理