【导读】
本研究通过超高分辨率无人机摄影测量技术对实验桥进行变形监测,实现了优于1毫米的测量精度,并首次实现了从传统点线测量到全场变形分析的跨越,揭示了桥梁在荷载下的复杂变形模式,为基础设施健康监测提供了了一种全新的高效解决方案。
基础设施检测,特别是对桥梁等关键结构的检测,对于保障公共安全和延长交通网络使用寿命至关重要。全球大多数桥梁均采用标准定期检测方案,当前损伤检测与分类主要基于目视现场勘查,及运用各类技术开展的基础无损/半损伤检测结果。这些检测结果构成了维护管理框架内桥梁检测决策与行动的基础。部分情况下,此类检测已辅以基于传感器的状态评估------即结构健康监测(SHM),尤其当采用传感器网络实施时效果显著。其目标是据此评估结构健康状况或性能,而仅依靠检测型监测无法实现此目标。
直接针对无人机影像开展损伤识别与裂缝检测,并且能够一键对比不同模型的效果,加速从实验到落地的转化。

论文标题:
Very High-Resolution Bridge Deformation Monitoring Using UAV-based Photogrammetry
论文 链接 :
相关研究
本研究关注桥梁在加载与卸载过程中的结构性能表现。测量桥梁变形的方法多种多样,我们将其分为三类:基于点的变形测量方法、基于轮廓的变形测量方法以及基于面积的变形测量方法。
材料与方法
- 实验桥"协奏曲"
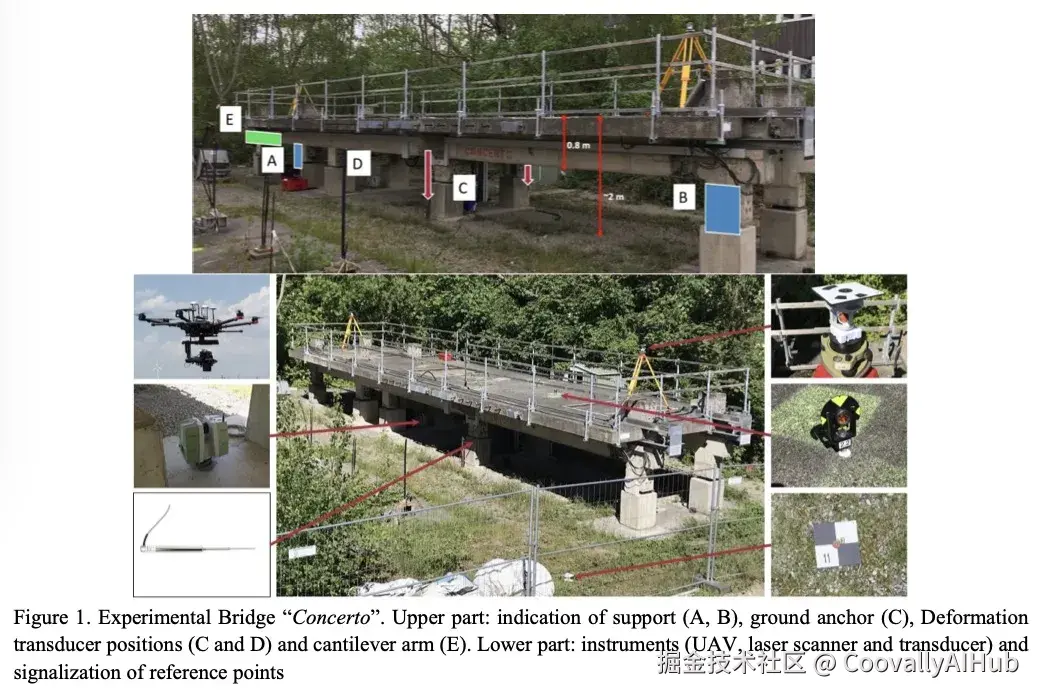
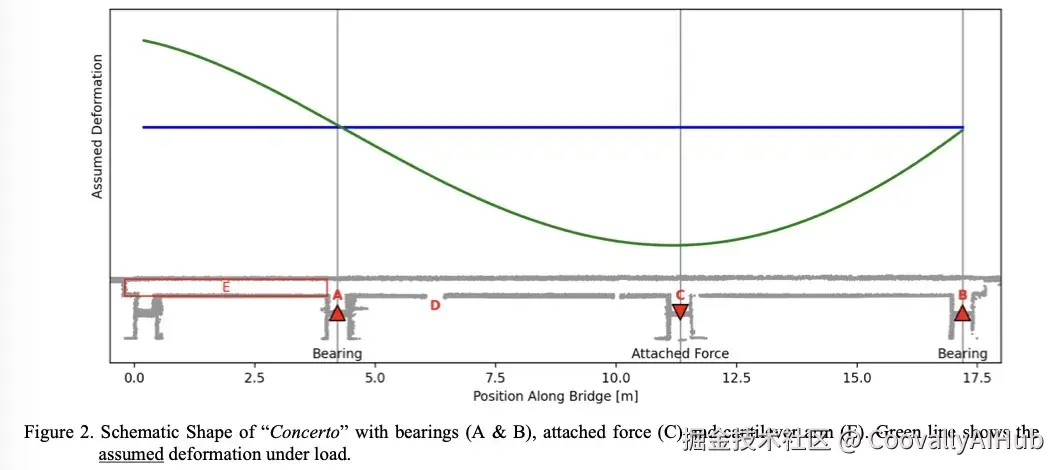
为长期验证创新型结构健康监测方法,2005年建造了实验性双跨板梁桥"协奏曲"(图1)。该桥总长18.5米,水平桥面宽4.0米,竖向腹板高度0.8米。图1上部分展示了支座(A、B)、地锚(C)、传感器(C、D)及悬臂(E)的位置。图1下部分则描绘了仪器设备与基准点标识。图2展示了"协奏曲"桥的部分剖面,叠加了假设的变形曲线。该结构在桥体两端(A、B点)支承,单侧悬挑(E区)。
- 变形试验与时段划分
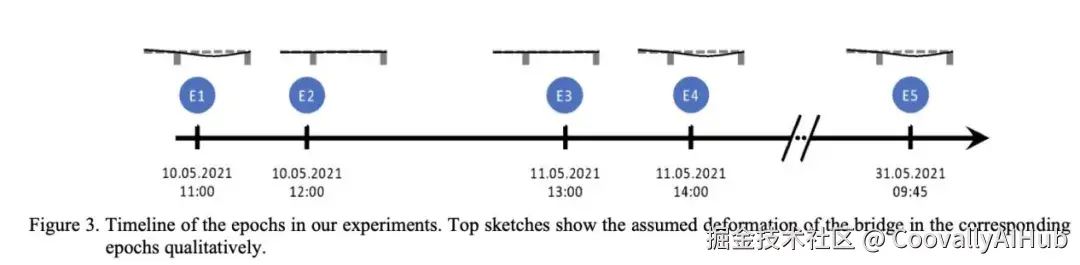
我们在"协奏曲"实验桥上开展了多次变形试验。由于该桥在试验前已持续承载17年(定义为时段1),我们首先需进行卸载(时段2),详见图3。图3展示了各时段的时间线及桥梁假设变形特征示意图。
- 变形测量方法与实施
传感器与全站仪测量:在对实验桥进行三阶段加载时,施加载荷的同时,通过位移传感器(HBM W20TK型,位移测量误差小于1%的实际位移误差,测量频率=0.02 Hz)。
地面激光扫描:设备最佳定位需通过经验调整实现:在良好入射角下捕捉最大变形区域,该区域靠近地锚轴线。同时需考虑设备与桥底间距极短(<1.50米)的问题------此短距离会产生强烈测量噪声,需在最大变形区域进行降噪处理。因此扫描仪最终设置在距地锚轴线约5米处,靠近图1中D点位置的传感器。
无人机摄影测量法:我们采用基于无人机摄影测量法的区域变形测量方案,通过搭载于无人机垂直向下的高分辨率相机以高重叠率采集影像。无人机需执行自动之字形飞行任务,确保恒定重叠度与飞行高度。本研究实验采用搭载PhaseOne iXM-100相机的商用DJI Matrice 600 Pro多旋翼无人机(如图6所示)。该无人机配备差分RTK系统,可实现厘米级定位精度并为影像提供坐标参考。
实验结果与讨论
本研究考察了在规定载荷下测量"协奏曲"实验桥变形的不同方法。
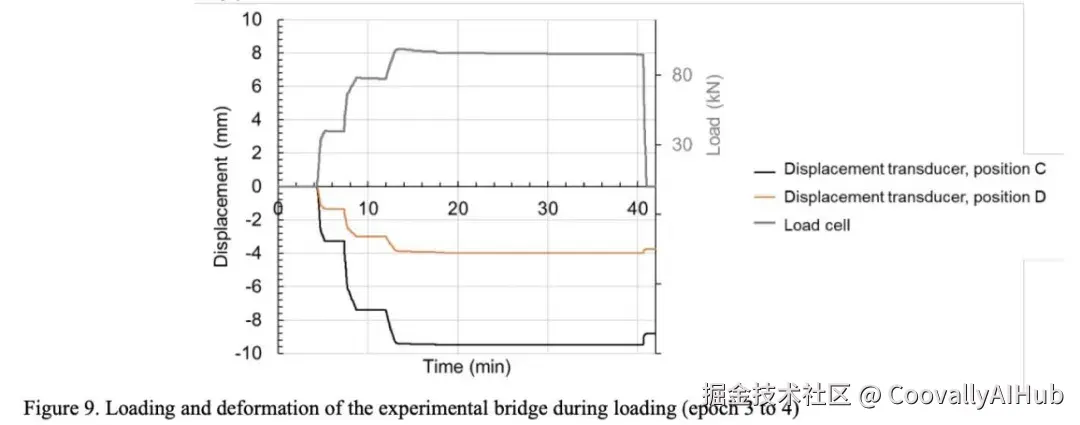
位移传感器结果: 图9展示了实验桥的加载记录及其对应变形行为。在首次加载阶段,每个地锚的荷载传感器测得约40kN载荷,导致D点(靠近A支座)位移1.4毫米,C点(约位于桥跨中段)位移3.3毫米。
全站仪变形测量结果: 采用10、20、30、40号测站(参见图4)进行多次观测,完成全网调整。
随后,在每个观测期内,所有测量均从10号站出发,分别指向R1和40号站进行。测量使用同一台全站仪,大气修正值直接输入仪器,但仅执行了一组完整观测。
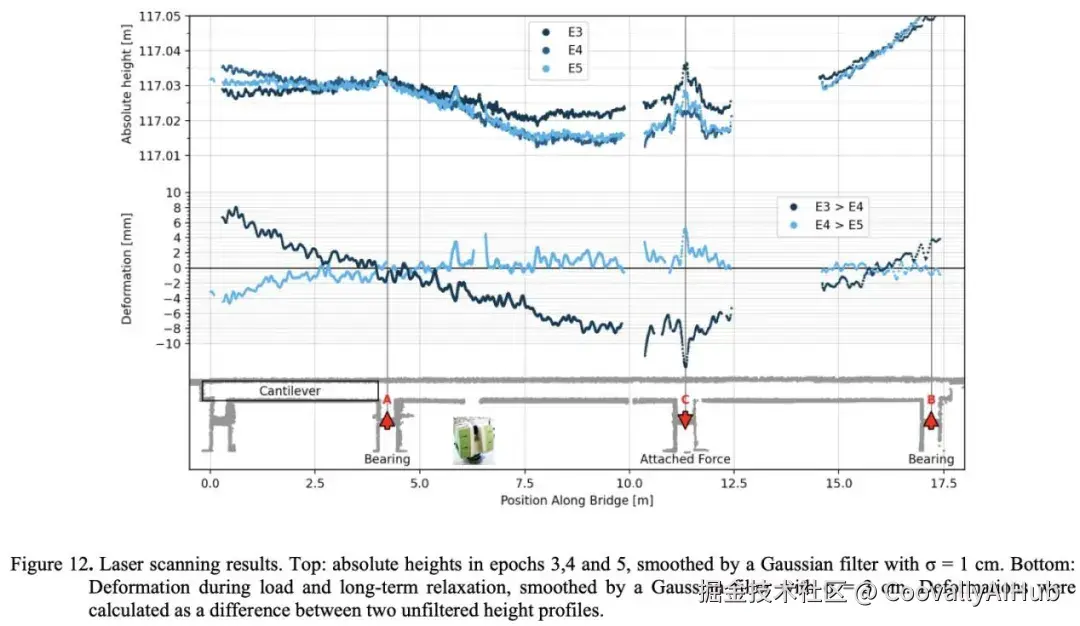
TLS测量结果: 为处理捕获的轮廓数据,需从扫描线中剔除不属于桥面底部的点。随后,每个时段选取一条代表性轮廓线以获得"静态"场景,并与其他方法及设备的结果进行对比。激光扫描仪测得的桥底绝对高度如图12上部所示。该扫描仪垂直分辨率为1毫米,但测量值存在较高噪声,源于边缘效应和传感器固有噪声。因此所有剖面均采用σ=1厘米的高斯滤波器进行平滑处理。最深色曲线显示第3时段(桥梁加载前)的高度,中蓝色曲线代表第4时段(桥梁加载后)的状态,浅蓝色曲线则呈现第5时段(等待20天监测长期变形后)的数据。
无人机摄影测量结果: 由于摄影测量重建包含多个步骤------即捆绑调整、密度化处理及数字高程模型生成,我们将按此顺序详细阐述各环节。
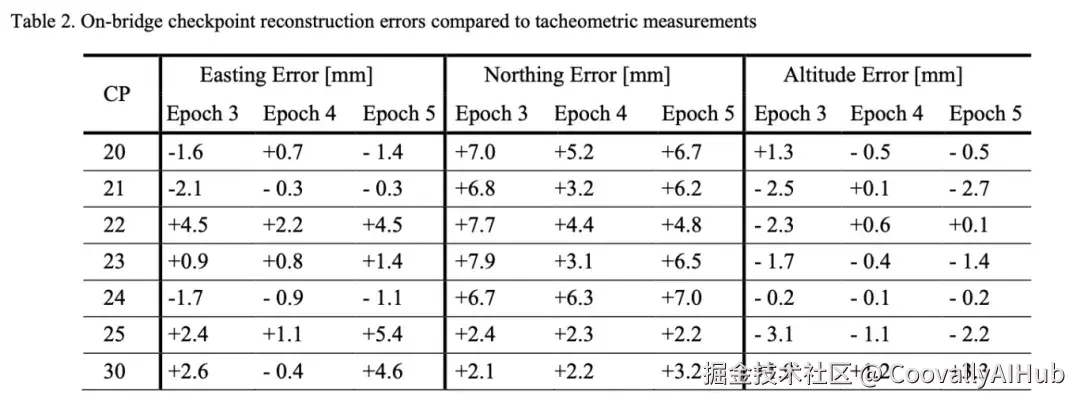
表2展示了第3、4、5时段内,全站仪测量值与摄影测量重建值在桥面控制点间的差异。这些三维点作为各时段控制点,因全站仪测量与无人机飞行间假设无位移。可见水平误差显著超出1毫米的预期精度。
在此案例研究中,摄影测量重建是唯一能同时提供剖面变形数据与平面变形表示的方法。这使得我们能够深入理解变形机制,包括横截面弯曲与扭转现象。图14通过彩色编码投影技术,在桥梁正射镶嵌图上展示了加载过程(第3至4阶段)中的变形情况。红色区域表示因荷载下沉的部位,绿色区域则显示被抬升的结构部分。支撑区域以黑色呈现,表明未发生变形。
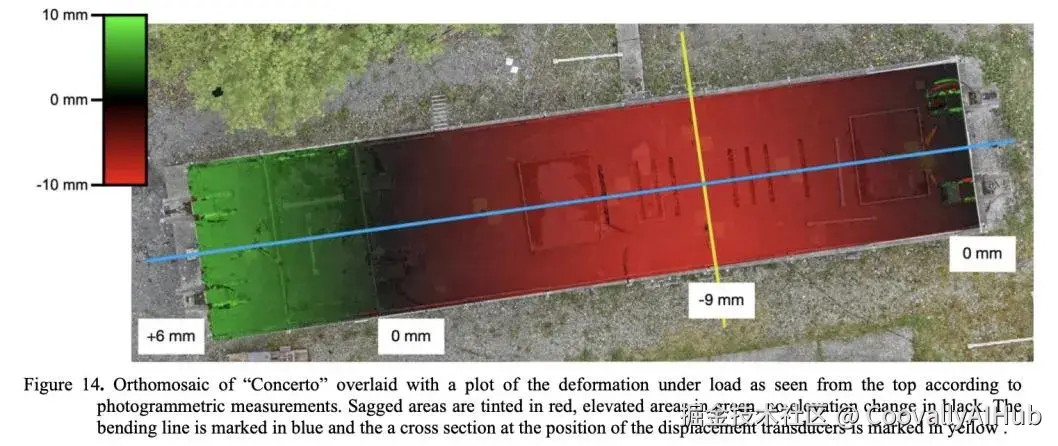
可得出若干关键观察:桥面平均下沉8毫米,但分布不均------北向区域下沉约7毫米,南向区域达9毫米。此外,外侧区域似乎抬升了1-2毫米,并呈现微弱北向倾斜。该图基于各时段摄影测量点云的点间距离计算得出。这些距离值对特定时段的微小变化极为敏感,例如植被覆盖情况。因此图中可见部分噪声(桥面区域约±1毫米,外部区域±2毫米)。尤其在外部区域,差异值中存在部分异常点,源于地表植被变化所致。
- 不同技术间的比较
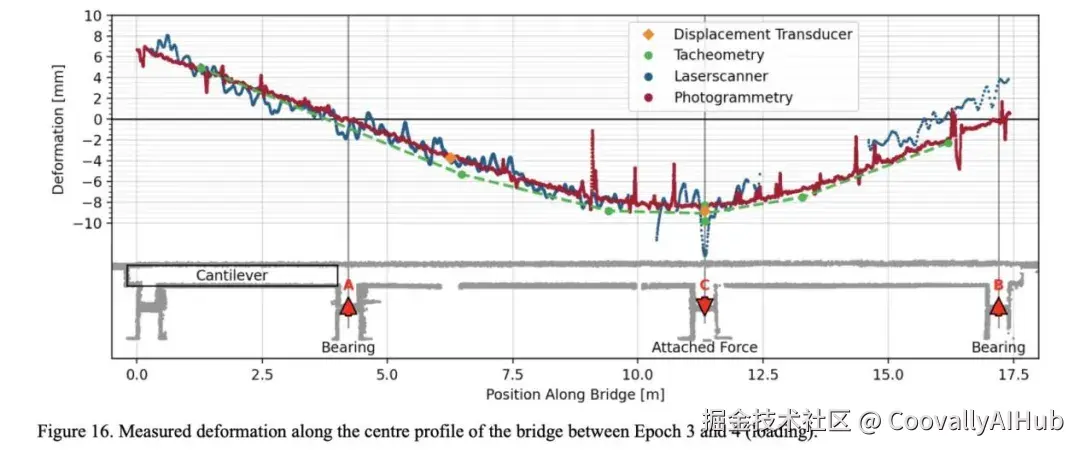
图16展示了施加载荷(第3与第4时段之间)导致的变形变化,以及采用前文所述不同方法测得的对应弯曲曲线。图16中两个黄色菱形代表位移传感器测量结果,被视为最精确的测量数据,因此作为基准值。可见无人机摄影测量在上述两点产生了良好的变形结果,误差均小于1毫米。激光扫描观测受桥梁底面不平整及噪声干扰,但曲线整体形态表明误差处于相同量级------除第3时段B支座附近存在未知影响因素外。
同时,图16展示了无人机摄影测量法获得的平滑曲线,尽管仅采用σ=1厘米的高斯滤波处理。相比之下,激光扫描仪测量的弯曲曲线经σ=3厘米平滑处理后仍存在更多峰值干扰。需注意的是,如前所述,两种方法分别观测了桥梁的不同侧面。
结论
本研究旨在比较分析不同传感技术在原位结构健康监测中的应用效果。为此,我们在研究桥梁上安装了多种传感器,并在不同时段施加了精确定义的载荷。尽管在导引测量中的点标记存在局限性,但我们仍获得了宝贵的研究成果。
基于无人机摄影测量模块的校准工作,通过在桥梁周边稳定区域进行全站仪网测量完成。尽管仍存在部分不确定性,但施加载荷引发的整体弯曲行为与传感器测量值的偏差小于1毫米,这证实了桥梁在支座处无变形的假设。
尽管全站仪测量点标记与激光扫描装置存在局限,但我们证明:在大型基础设施上采用无人机摄影测量图像块技术,可为整体变形行为提供宝贵洞察。需注意该方法无法监测动态行为。但基于无人机摄影测量可推导整体变形模式,有助于理解结构行为,例如在长期监测任务中。因不同时段点位存在位移,变形监测任务需格外关注。