目录
[4.1 机构组成](#4.1 机构组成)
[4.2 位姿描述与支链长度映射](#4.2 位姿描述与支链长度映射)
[4.3 运动学核心问题](#4.3 运动学核心问题)
[4.4 雅可比矩阵与速度映射](#4.4 雅可比矩阵与速度映射)
1.课题概述
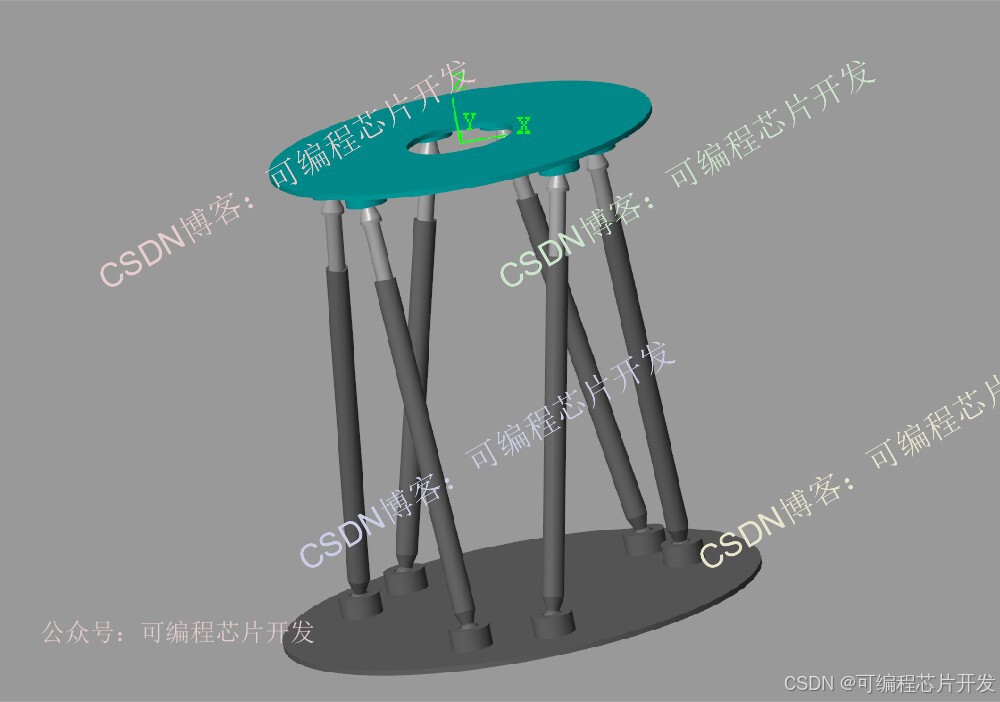
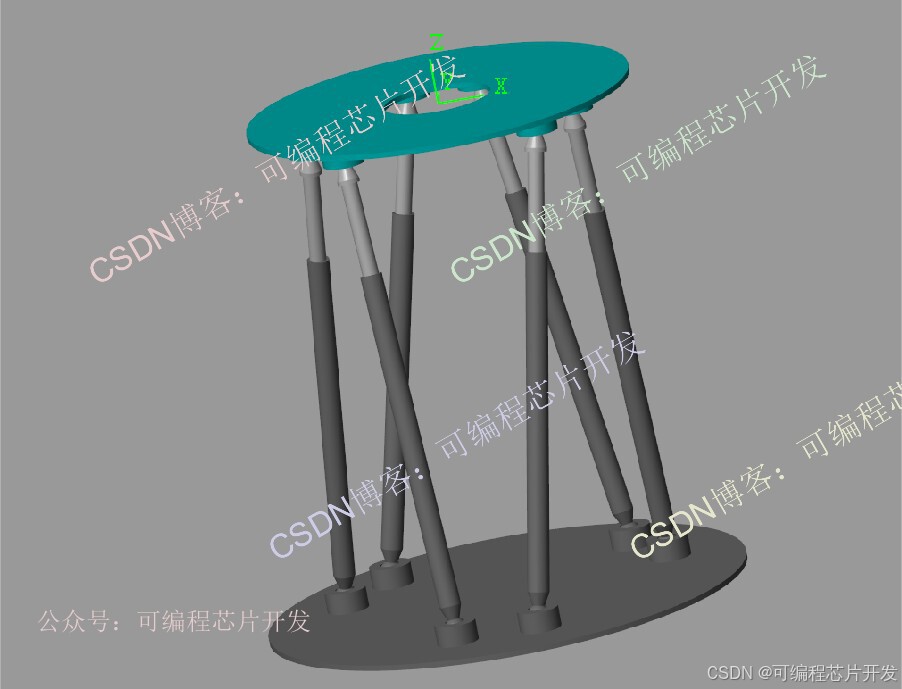
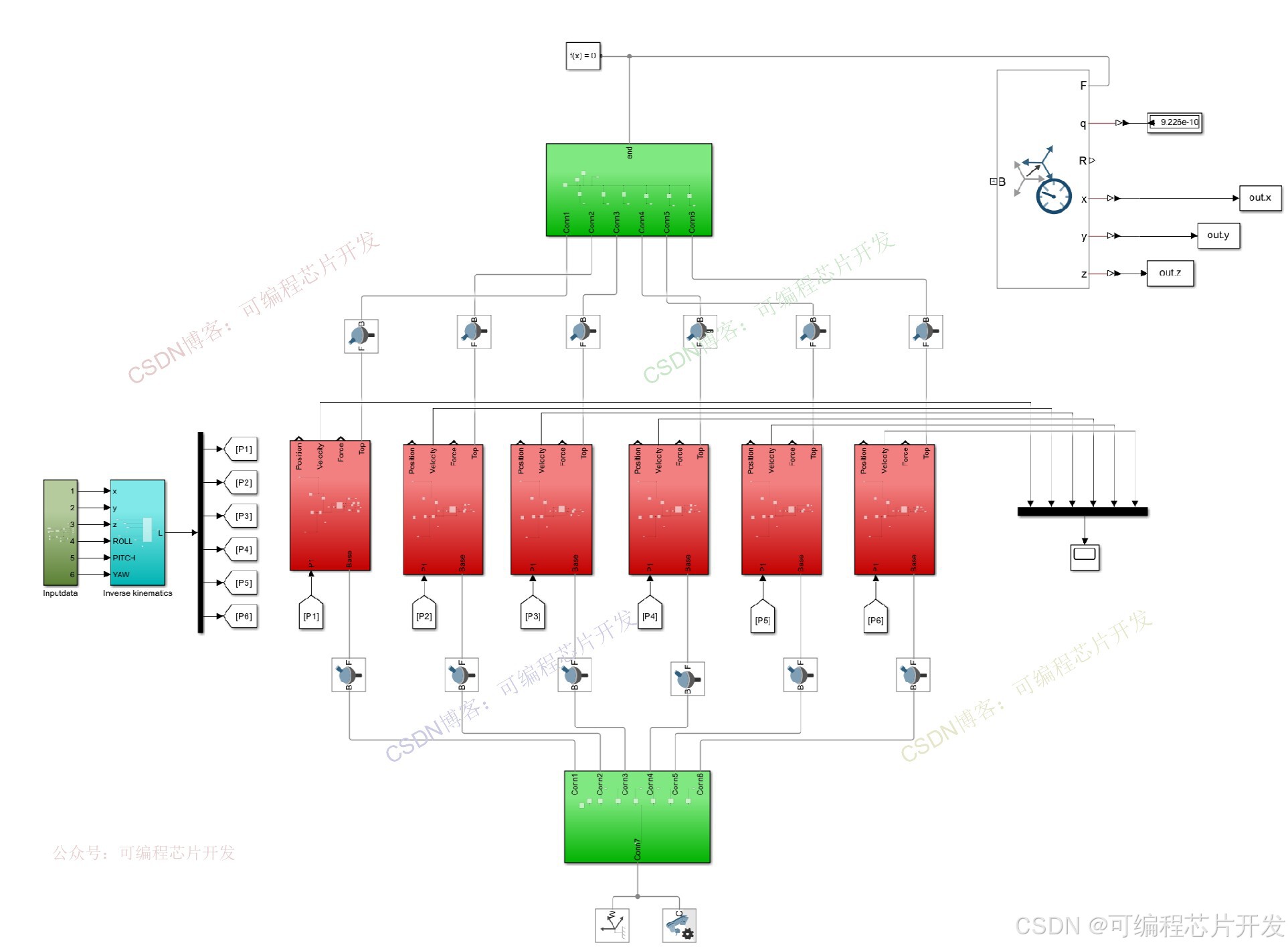
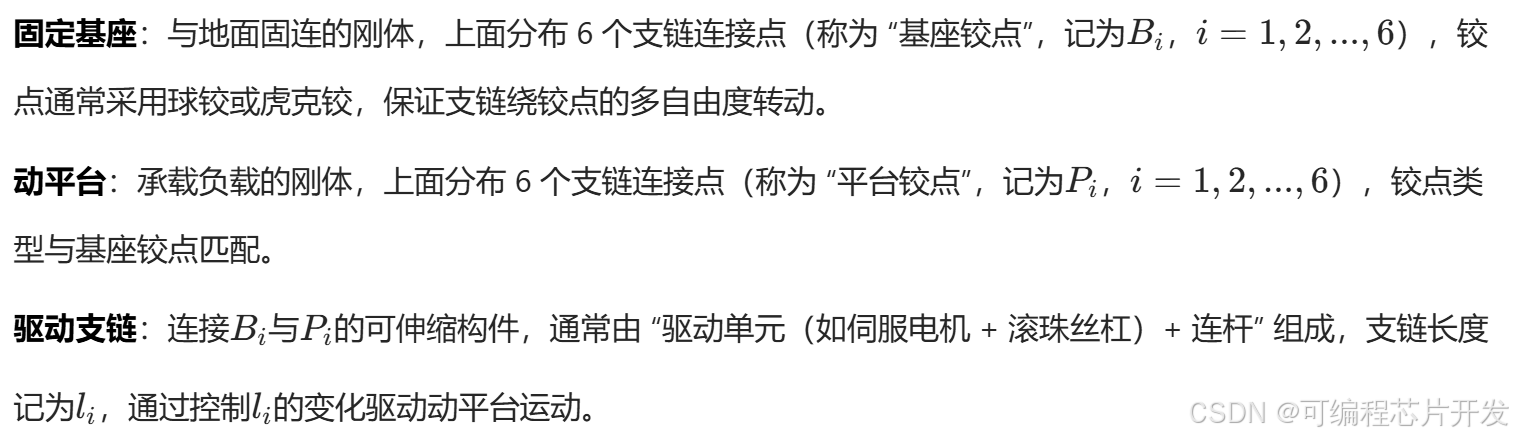
Stewart并联机器人的机构组成可分为三部分:固定基座(Base)、动平台(Platform)、6 根驱动支链(Legs),本课题通过simulink对其进行建模,模拟其动态工作过程。
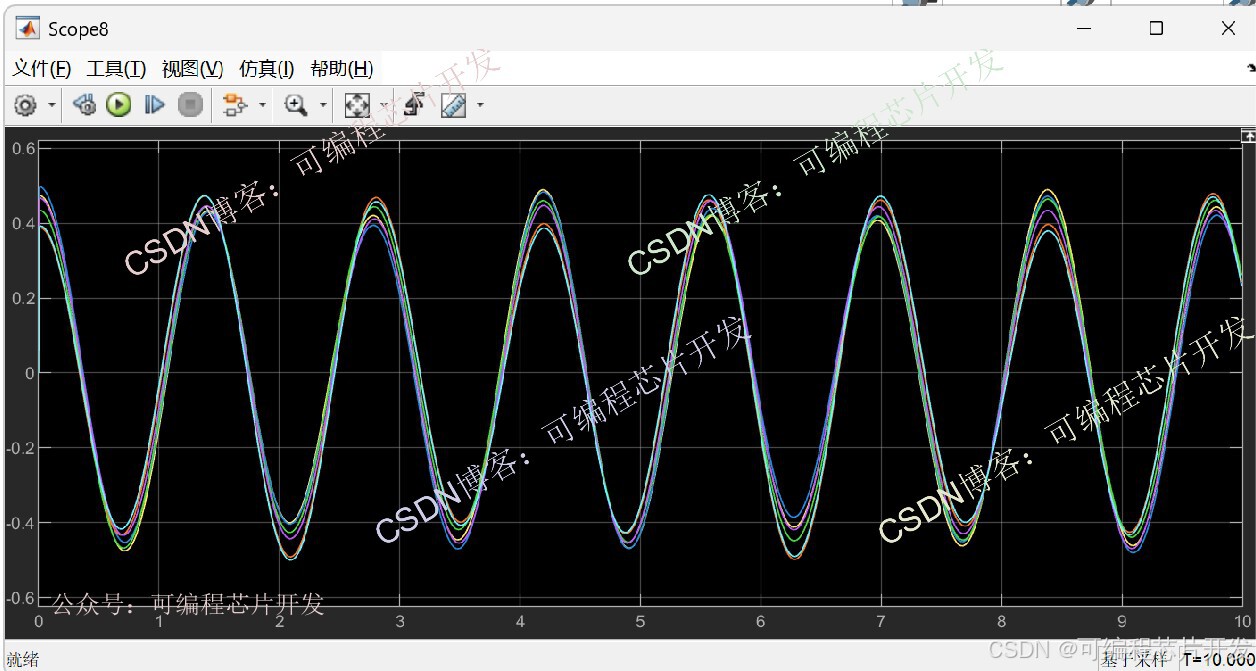
2.系统仿真结果
3.核心程序
matlab2024b
127
4.系统原理简介
Stewart并联机器人的实现是一个 "机械设计→运动学建模→硬件选型→控制算法开发→系统调试" 的完整流程,每个步骤需紧密衔接,确保机构性能与控制精度满足需求。Stewart并联机器人的核心原理基于刚体运动学与支链驱动控制,通过协调6根支链的长度变化,驱动动平台实现预期的位姿(位置+姿态)运动,同时通过运动学逆解(已知动平台位姿求支链长度)和正解(已知支链长度求动平台位姿)建立位姿与支链长度的映射关系,为控制提供数学基础。
4.1 机构组成
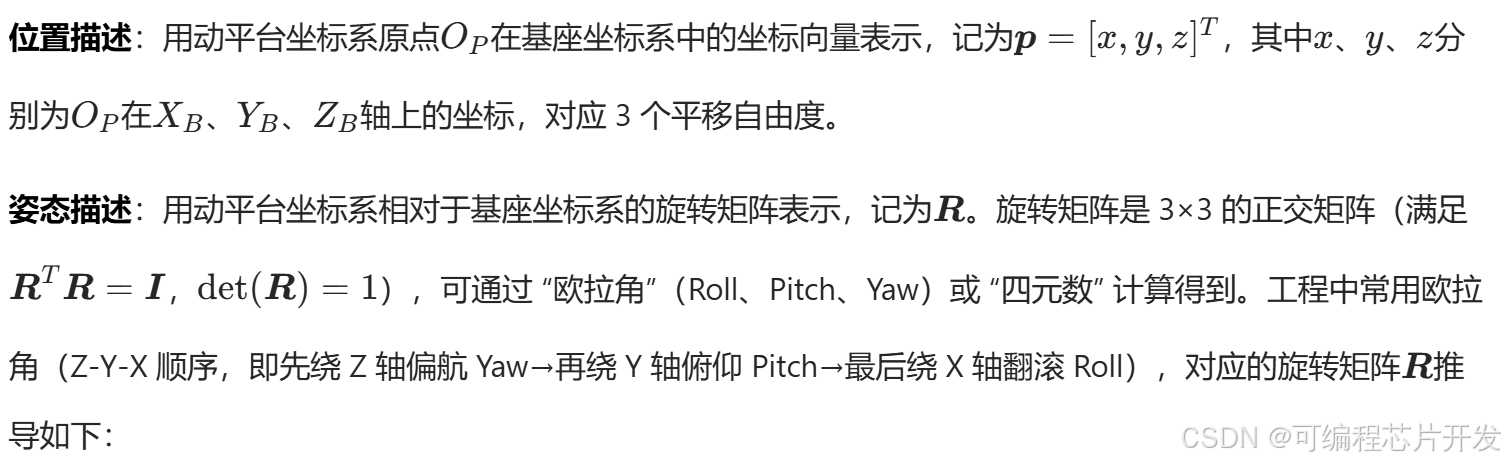
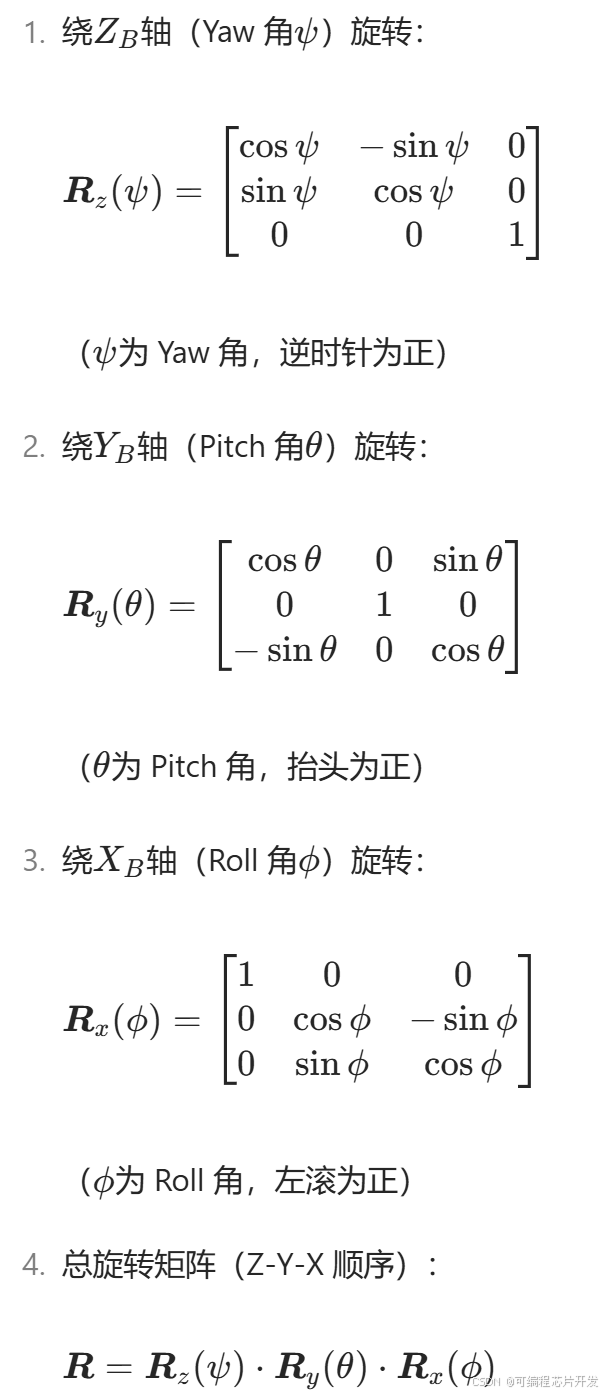
4.2 位姿描述与支链长度映射
动平台的位姿需通过 "位置" 和 "姿态" 两个维度描述,最终建立位姿与6根支链长度的数学映射。
4.3 运动学核心问题
Stewart并联机器人的运动学分析包含两个核心问题:运动学逆解与运动学正解,二者分别对应"控制指令生成"与"位姿反馈计算"两个关键环节。
4.4 雅可比矩阵与速度映射
除了位姿与长度的映射,Stewart机器人的速度映射(动平台的线速度 / 角速度与支链的伸缩速度关系)也是核心原理之一,由雅可比矩阵(Jacobian Matrix)描述,用于运动规划与动态控制(如力控制、 impedance控制)。
5.参考文献
1黄田,汪劲松,WhitehouseDJ.Stewart并联机器人局部灵活度与各向同性条件解析J.机械工程学报, 1999, 35(5):6.DOI:10.3321/j.issn:0577-6686.1999.05.010.
2王玉新,王仪明,柳杨,等.对称结构Stewart并联机器人的位置正解及构型分析J.中国机械工程, 2002, 13(9):4.DOI:10.3321/j.issn:1004-132X.2002.09.005.
3文刚,高宏力,彭志文,等.Stewart并联机器人控制算法研究J.机械设计与制造, 2018(8):4.DOI:CNKI:SUN:JSYZ.0.2018-08-066.
6.完整工程文件
v
v