第十七章 I2C介绍及应用
1. I2C 简介
I2C(Inter-Integrated Circuit,内部集成电路总线)是 STM32H750VBT6 中用于连接低速外围设备 的同步串行通信接口,由飞利浦(NXP)开发,采用 两线制 设计:
- SDA:串行数据线(Serial Data)
- SCL:串行时钟线(Serial Clock)
I2C 支持 多主多从架构 、7 位/10 位地址寻址 、上拉电阻电平匹配 ,广泛应用于连接 EEPROM、温度传感器、RTC、OLED 显示屏、音频编解码器 等外设,是嵌入式系统中最常用的低速通信总线之一。
🔍 核心定位:
I2C ≠ UART/SPI ,而是共享总线型、地址可寻的"局域网"
最高通信速率:
- 标准模式:100 kbps
- 快速模式:400 kbps
- 快速模式+:1 Mbps(STM32H7 支持)
支持 DMA 传输 、超时检测 、SMBus/PMBus 兼容
可配置为 主模式 (Master)或 从模式(Slave)
1.1 I2C 核心特性(STM32H750VBT6)
| 特性 | 参数 | 说明 | 应用场景 |
|---|---|---|---|
| 通信速率 | 最高 1 Mbps(快速模式+) | 支持时钟动态调节 | 高速传感器 |
| 地址模式 | 7-bit / 10-bit | 兼容大多数 I2C 设备 | 多设备挂载 |
| 数据方向 | 发送 / 接收 | 支持读写切换 | EEPROM 读写 |
| DMA 支持 | ✅(TX/RX) | 零 CPU 开销传输 | 大数据块传输 |
| 超时机制 | BUSTIMEOUT | 防止总线死锁 | 增强系统可靠性 |
| SMBus/PMBus | ✅ | 支持协议级控制 | 电源管理、电池监控 |
| 多 I2C 实例 | I2C1、I2C2、I2C3、I2C4 | 可独立配置为主/从 | 多设备系统 |
| 时钟源 | APB1(100 MHz) | 通过 PRESC 分频生成 SCL |
精确波特率控制 |
📌 STM32H750VBT6 专属优势:
- 支持时钟延展(Clock Stretching):从设备可拉低 SCL 要求延时
- 硬件 CRC 生成:SMBus 模式下自动生成 PEC 校验
- 双地址模式 :可响应两个从地址(
OAR2) - 噪声滤波:可配置数字滤波器抑制毛刺
- 与 RTC/ADC 协同:可用于传感器数据采集系统
1.2 I2C 工作原理详解
1.2.1 通信协议时序
Master Slave START (SDA↓ while SCL=H) 7-bit Address + R/W bit ACK (SDA↓) Data Byte ACK Data Byte ACK/NACK alt 写操作 读操作 STOP (SDA↑ while SCL=H) Master Slave
-
关键信号定义:
- START:SDA 从高到低,SCL 为高
- STOP:SDA 从低到高,SCL 为高
- ACK:第 9 个时钟周期,SDA 被拉低
- NACK:SDA 保持高电平
-
7-bit 地址格式:
c[ D7 D6 D5 D4 D3 D2 D1 | R/W ] 地址 (7-bit) | 0=Write, 1=Read
1.2.2 通信模式
| 模式 | 说明 | 典型应用 |
|---|---|---|
| 主发送 | MCU 发送数据到从设备 | 写 EEPROM、配置寄存器 |
| 主接收 | MCU 从从设备读取数据 | 读传感器数据 |
| 从发送 | MCU 作为从设备发送 | 多主通信、桥接器 |
| 从接收 | MCU 接收主设备数据 | 命令接收、配置更新 |
1.2.3 波特率生成
-
I2C 波特率由
TIMINGR寄存器控制,计算复杂:- 包含 SCL 高/低电平时间 、数据建立/保持时间
-
公式(简化):

-
推荐使用 STM32CubeMX 自动生成 TIMINGR 值
1.3 关键寄存器操作
1.3.1 I2C 主要寄存器
| 寄存器 | 关键位域 | 功能 | 说明 |
|---|---|---|---|
| CR1 | PE, TXIE, RXIE, NACKIE, GCEN, SBC | 使能、中断控制 | PE=1 启用 I2C |
| CR2 | SADD9:0, RD_WRN, NBYTES, RELOAD, START, STOP, AUTOEND | 目标地址、方向、数据量 | 写此寄存器触发传输 |
| TIMINGR | PRESC, SCLL, SCLH, SDADEL, SCLDEL | 时序配置 | 决定波特率 |
| ISR | TXIS, RXNE, TC, TCR, BERR, ARLO | 状态标志 | 必须在 ISR 中读取 |
| TXDR | TXDATA7:0 | 发送数据寄存器 | 写入即启动发送 |
| RXDR | RXDATA7:0 | 接收数据寄存器 | 只读 |
| ICR | BERRCF, ARLOCF | 清除错误标志 | 写 1 清除 |
1.3.2 配置步骤(I2C1 主模式,400 kbps)
c
// 1. 使能 I2C1 时钟和 GPIO 时钟
RCC->APB1LENR |= RCC_APB1LENR_I2C1EN;
RCC->AHB4ENR |= RCC_AHB4ENR_GPIOBEN;
// 2. 配置 PB6= SCL, PB7= SDA 为开漏复用
GPIOB->MODER |= GPIO_MODER_MODER6_1 | GPIO_MODER_MODER7_1;
GPIOB->OTYPER |= GPIO_OTYPER_OT6 | GPIO_OTYPER_OT7; // 开漏
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEED6 | GPIO_OSPEEDER_OSPEED7; // 高速
GPIOB->PUPDR |= GPIO_PUPDR_PUPD6_0 | GPIO_PUPDR_PUPD7_0; // 上拉
GPIOB->AFR[0] |= 4 << 24 | 4 << 28; // PB6/PB7 = AF4 (I2C1)
// 3. 配置 TIMINGR(400 kbps,PCLK1=100MHz)
I2C1->TIMINGR =
(1 << 28) // PRESC = 1
| (0x13 << 20) // SCLDEL = 19
| (0x10 << 16) // SDADEL = 16
| (0x3 << 8) // SCLH = 3
| (0x9 << 0); // SCLL = 9
// 4. 使能 I2C
I2C1->CR1 |= I2C_CR1_PE;1.3.3 HAL 库简化操作
c
I2C_HandleTypeDef hi2c1;
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x10707DBC; // 400 kHz(由 CubeMX 生成)
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&hi2c1);1.4 I2C vs SPI vs UART 对比
| 特性 | I2C | SPI | UART |
|---|---|---|---|
| 线数 | 2 | 3--4(CS可多) | 2 |
| 速率 | 1 Mbps(max) | 10+ Mbps | 1--10 Mbps |
| 寻址 | ✅(7/10-bit) | ❌(靠CS) | ❌ |
| 主从数量 | 多主多从 | 单主多从 | 点对点 |
| 硬件复杂度 | 低 | 中 | 低 |
| 抗干扰能力 | 中 | 低 | 中 |
| 典型应用 | 传感器、EEPROM | Flash、SD卡 | 调试、GPS |
💡 选型建议:
- 多设备、低速 → I2C
- 高速、大数据 → SPI
- 点对点、调试 → UART
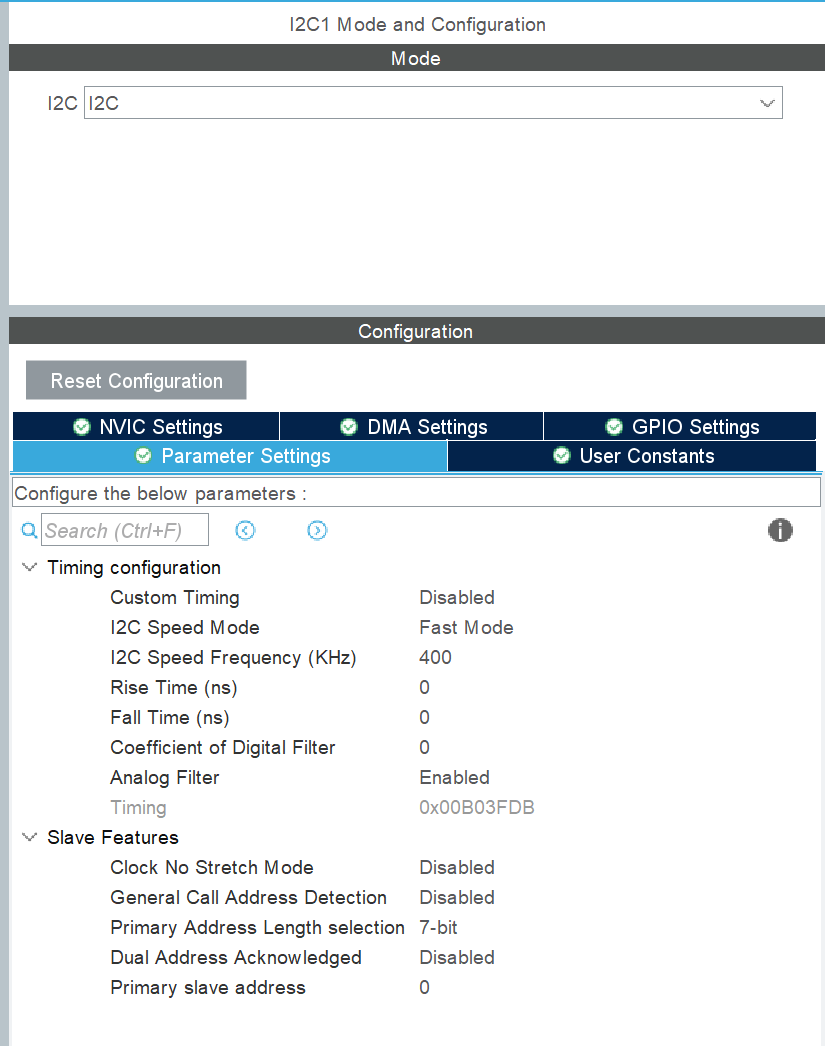
2. I2C使用示例-STM32IDE
2.1 STM32Cube配置
2.2 用户代码
c
#include "i2c.h"
#include "delay.h"
/**
* @brief 初始化IIC
* @param 无
* @retval 无
*/
void iic_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
IIC_SCL_GPIO_CLK_ENABLE(); /* SCL引脚时钟使能 */
IIC_SDA_GPIO_CLK_ENABLE(); /* SDA引脚时钟使能 */
gpio_init_struct.Pin = IIC_SCL_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 快速 */
HAL_GPIO_Init(IIC_SCL_GPIO_PORT, &gpio_init_struct);/* SCL */
gpio_init_struct.Pin = IIC_SDA_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_OD; /* 推挽输出 */
HAL_GPIO_Init(IIC_SDA_GPIO_PORT, &gpio_init_struct);/* SDA */
/* SDA引脚模式设置,开漏输出,上拉, 这样就不用再设置IO方向了, 开漏输出的时候(=1), 也可以读取外部信号的高低电平 */
iic_stop(); /* 停止总线上所有设备 */
}
/**
* @brief IIC延时函数,用于控制IIC读写速度
* @param 无
* @retval 无
*/
static void iic_delay(void)
{
delay_us(2); /* 2us的延时, 读写速度在250Khz以内 */
}
/**
* @brief 产生IIC起始信号
* @param 无
* @retval 无
*/
void iic_start(void)
{
IIC_SDA(1);
IIC_SCL(1);
iic_delay();
IIC_SDA(0); /* START信号: 当SCL为高时, SDA从高变成低, 表示起始信号 */
iic_delay();
IIC_SCL(0); /* 钳住I2C总线,准备发送或接收数据 */
iic_delay();
}
/**
* @brief 产生IIC停止信号
* @param 无
* @retval 无
*/
void iic_stop(void)
{
IIC_SDA(0); /* STOP信号: 当SCL为高时, SDA从低变成高, 表示停止信号 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SDA(1); /* 发送I2C总线结束信号 */
iic_delay();
}
/**
* @brief 等待应答信号到来
* @param 无
* @retval 1,接收应答失败
* 0,接收应答成功
*/
uint8_t iic_wait_ack(void)
{
uint8_t waittime = 0;
uint8_t rack = 0;
IIC_SDA(1); /* 主机释放SDA线(此时外部器件可以拉低SDA线) */
iic_delay();
IIC_SCL(1); /* SCL=1, 此时从机可以返回ACK */
iic_delay();
while (IIC_READ_SDA) /* 等待应答 */
{
waittime++;
if (waittime > 250)
{
iic_stop();
rack = 1;
break;
}
}
IIC_SCL(0); /* SCL=0, 结束ACK检查 */
iic_delay();
return rack;
}
/**
* @brief 产生ACK应答
* @param 无
* @retval 无
*/
void iic_ack(void)
{
IIC_SDA(0); /* SCL 0 -> 1 时 SDA = 0,表示应答 */
iic_delay();
IIC_SCL(1); /* 产生一个时钟 */
iic_delay();
IIC_SCL(0);
iic_delay();
IIC_SDA(1); /* 主机释放SDA线 */
iic_delay();
}
/**
* @brief 不产生ACK应答
* @param 无
* @retval 无
*/
void iic_nack(void)
{
IIC_SDA(1); /* SCL 0 -> 1 时 SDA = 1,表示不应答 */
iic_delay();
IIC_SCL(1); /* 产生一个时钟 */
iic_delay();
IIC_SCL(0);
iic_delay();
}
/**
* @brief IIC发送一个字节
* @param data: 要发送的数据
* @retval 无
*/
void iic_send_byte(uint8_t data)
{
uint8_t t;
for (t = 0; t < 8; t++)
{
IIC_SDA((data & 0x80) >> 7); /* 高位先发送 */
iic_delay();
IIC_SCL(1);
iic_delay();
IIC_SCL(0);
data <<= 1; /* 左移1位,用于下一次发送 */
}
IIC_SDA(1); /* 发送完成, 主机释放SDA线 */
}
/**
* @brief IIC读取一个字节
* @param ack: ack=1时,发送ack; ack=0时,发送nack
* @retval 接收到的数据
*/
uint8_t iic_read_byte(uint8_t ack)
{
uint8_t i, receive = 0;
for (i = 0; i < 8; i++ ) /* 接收1个字节数据 */
{
receive <<= 1; /* 高位先输出,所以先收到的数据位要左移 */
IIC_SCL(1);
iic_delay();
if (IIC_READ_SDA)
{
receive++;
}
IIC_SCL(0);
iic_delay();
}
if (!ack)
{
iic_nack(); /* 发送nACK */
}
else
{
iic_ack(); /* 发送ACK */
}
return receive;
}
c
#include "i2c.h"
#include "eeprom.h"
#include "delay.h"
/**
* @brief 初始化IIC接口
* @param 无
* @retval 无
*/
void at24cxx_init(void)
{
iic_init();
}
/**
* @brief 在AT24CXX指定地址读出一个数据
* @param readaddr: 开始读数的地址
* @retval 读到的数据
*/
uint8_t at24cxx_read_one_byte(uint16_t addr)
{
uint8_t temp = 0;
iic_start(); /* 发送起始信号 */
/* 根据不同的24CXX型号, 发送高位地址
* 1, 24C16以上的型号, 分2个字节发送地址
* 2, 24C16及以下的型号, 分1个低字节地址 + 占用器件地址的bit1~bit3位 用于表示高位地址, 最多11位地址
* 对于24C01/02, 其器件地址格式(8bit)为: 1 0 1 0 A2 A1 A0 R/W
* 对于24C04, 其器件地址格式(8bit)为: 1 0 1 0 A2 A1 a8 R/W
* 对于24C08, 其器件地址格式(8bit)为: 1 0 1 0 A2 a9 a8 R/W
* 对于24C16, 其器件地址格式(8bit)为: 1 0 1 0 a10 a9 a8 R/W
* R/W : 读/写控制位 0,表示写; 1,表示读;
* A0/A1/A2 : 对应器件的1,2,3引脚(只有24C01/02/04/8有这些脚)
* a8/a9/a10: 对应存储整列的高位地址, 11bit地址最多可以表示2048个位置,可以寻址24C16及以内的型号
*/
if (EE_TYPE > AT24C16) /* 24C16以上的型号, 分2个字节发送地址 */
{
iic_send_byte(0XA0); /* 发送写命令, IIC规定最低位是0, 表示写入 */
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr >> 8);/* 发送高字节地址 */
}
else
{
iic_send_byte(0XA0 + ((addr >> 8) << 1)); /* 发送器件 0XA0 + 高位a8/a9/a10地址,写数据 */
}
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr % 256); /* 发送低位地址 */
iic_wait_ack(); /* 等待ACK, 此时地址发送完成了 */
iic_start(); /* 重新发送起始信号 */
iic_send_byte(0XA1); /* 进入接收模式, IIC规定最低位是0, 表示读取 */
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
temp = iic_read_byte(0); /* 接收一个字节数据 */
iic_stop(); /* 产生一个停止条件 */
return temp;
}
/**
* @brief 在AT24CXX指定地址写入一个数据
* @param addr: 写入数据的目的地址
* @param data: 要写入的数据
* @retval 无
*/
void at24cxx_write_one_byte(uint16_t addr, uint8_t data)
{
/* 原理说明见:at24cxx_read_one_byte函数, 本函数完全类似 */
iic_start(); /* 发送起始信号 */
if (EE_TYPE > AT24C16) /* 24C16以上的型号, 分2个字节发送地址 */
{
iic_send_byte(0XA0); /* 发送写命令, IIC规定最低位是0, 表示写入 */
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr >> 8);/* 发送高字节地址 */
}
else
{
iic_send_byte(0XA0 + ((addr >> 8) << 1)); /* 发送器件 0XA0 + 高位a8/a9/a10地址,写数据 */
}
iic_wait_ack(); /* 每次发送完一个字节,都要等待ACK */
iic_send_byte(addr % 256); /* 发送低位地址 */
iic_wait_ack(); /* 等待ACK, 此时地址发送完成了 */
/* 因为写数据的时候,不需要进入接收模式了,所以这里不用重新发送起始信号了 */
iic_send_byte(data); /* 发送1字节 */
iic_wait_ack(); /* 等待ACK */
iic_stop(); /* 产生一个停止条件 */
delay_ms(10); /* 注意: EEPROM 写入比较慢,必须等到10ms后再写下一个字节 */
}
/**
* @brief 检查AT24CXX是否正常
* @note 检测原理: 在器件的末地址写如0X55, 然后再读取, 如果读取值为0X55
* 则表示检测正常. 否则,则表示检测失败.
*
* @param 无
* @retval 检测结果
* 0: 检测成功
* 1: 检测失败
*/
uint8_t at24cxx_check(void)
{
uint8_t temp;
uint16_t addr = EE_TYPE;
temp = at24cxx_read_one_byte(addr); /* 避免每次开机都写AT24CXX */
if (temp == 0X55) /* 读取数据正常 */
{
return 0;
}
else /* 排除第一次初始化的情况 */
{
at24cxx_write_one_byte(addr, 0X55); /* 先写入数据 */
temp = at24cxx_read_one_byte(255); /* 再读取数据 */
if (temp == 0X55)return 0;
}
return 1;
}
/**
* @brief 在AT24CXX里面的指定地址开始读出指定个数的数据
* @param addr : 开始读出的地址 对24c02为0~255
* @param pbuf : 数据数组首地址
* @param datalen : 要读出数据的个数
* @retval 无
*/
void at24cxx_read(uint16_t addr, uint8_t *pbuf, uint16_t datalen)
{
while (datalen--)
{
*pbuf++ = at24cxx_read_one_byte(addr++);
}
}
/**
* @brief 在AT24CXX里面的指定地址开始写入指定个数的数据
* @param addr : 开始写入的地址 对24c02为0~255
* @param pbuf : 数据数组首地址
* @param datalen : 要写入数据的个数
* @retval 无
*/
void at24cxx_write(uint16_t addr, uint8_t *pbuf, uint16_t datalen)
{
while (datalen--)
{
at24cxx_write_one_byte(addr, *pbuf);
addr++;
pbuf++;
}
}
c
#include "main.h"
#include "eeprom.h"
#include "bsp_init.h"
#include "stdio.h" // For printf function
#include "string.h"
void SystemClock_Config(void);
void PeriphCommonClock_Config(void);
static void MPU_Config(void);
// 要写入的字符串
const uint8_t text_buf[] = {"STM32 I2C"};
#define text_size sizeof(text_buf)
int main(void)
{
uint8_t key_value;
uint8_t temp_data[text_size];
MPU_Config();
HAL_Init();
SystemClock_Config();
PeriphCommonClock_Config();
bsp_init();
at24cxx_init();
while(at24cxx_check()) // 监测不到24c02
{
HAL_GPIO_TogglePin(LED_RED_Port, LED_RED_Pin);
}
printf("24C02 Ready!!!\r\n");
while (1)
{
key_value = key_scan(0);
if(key_value == KEY0_PRES) // 写入数据
{
printf("Start Write 24C02....\r\n");
fflush(stdout);
at24cxx_write(0, (uint8_t*)text_buf, text_size);
HAL_Delay(5); // 确保写入完成
// 验证写入的数据
uint8_t verify_data[text_size];
at24cxx_read(0, verify_data, text_size);
if(memcmp(text_buf, verify_data, text_size) == 0) {
printf("24C02 Write Verified OK!\r\n");
} else {
printf("24C02 Write Verification Failed!\r\n");
}
fflush(stdout);
HAL_GPIO_WritePin(LED_GREEN_Port, LED_GREEN_Pin, RESET);
}
if(key_value == KEY1_PRES) // 读取数据
{
printf("Start Read 24C02....\r\n");
at24cxx_read(0, temp_data, text_size);
printf("The Data Readed Is: %s", (char*)temp_data);
}
HAL_Delay(10);
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI
|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Peripherals Common Clock Configuration
* @retval None
*/
void PeriphCommonClock_Config(void)
{
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_CKPER;
PeriphClkInitStruct.CkperClockSelection = RCC_CLKPSOURCE_HSI;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */3. I2C相关函数总结(HAL库)
3.1 初始化与配置
-
核心配置流程(五步关键操作):
- 使能时钟(I2C + GPIO)
- 配置GPIO复用功能(SCL/SDA)
- 初始化I2C参数(时钟/寻址模式等)
- 启动I2C外设
- 配置NVIC中断(若使用中断模式)
-
HAL_I2C_Init(I2C_HandleTypeDef *hi2c)
基础配置示例(I2C1 100kHz标准模式):c// 1. 使能I2C和GPIO时钟 __HAL_RCC_I2C1_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); // 2. 配置GPIO(PB6=SCL, PB7=SDA) GPIO_InitTypeDef GPIO_InitStruct = {0}; GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7; GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 开漏输出 GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉电阻 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF4_I2C1; // 复用功能 HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); // 3. 配置I2C参数 hi2c1.Instance = I2C1; hi2c1.Init.Timing = 0x10805E89; // 100kHz时序 hi2c1.Init.OwnAddress1 = 0x00; // 无自身地址 hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; // 7位寻址 hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; // 禁用双地址 hi2c1.Init.OwnAddress2 = 0x00; hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK; hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; // 禁用广播 hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; // 启用时钟延展 HAL_I2C_Init(&hi2c1); -
I2C_InitTypeDef结构体成员说明:成员 说明 关键选项 H750特殊说明 Timing时序配置 32位配置值 需精确计算 AddressingMode寻址模式 7BIT,10BIT7位最常用 DualAddressMode双地址 ENABLE,DISABLE从机模式用 GeneralCallMode广播模式 ENABLE,DISABLE从机响应0x00 NoStretchMode时钟延展 ENABLE,DISABLE影响从机兼容性 -
时序参数计算(核心!):
-
必须使用STM32CubeMX 生成精确
Timing值 -
关键参数:
模式 SCL频率 典型Timing值 H750时钟 Standard 100kHz 0x10805E89PCLK1=100MHz Fast 400kHz 0x00702991PCLK1=100MHz Fast+ 1MHz 0x00300B29PCLK1=100MHz
-
-
GPIO配置要点:
c// I2C引脚必须配置为开漏+上拉 GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 开漏模式 GPIO_InitStruct.Pull = GPIO_PULLUP; // 外部或内部上拉 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF4_I2C1; // 复用功能选择
3.2 I2C操作核心函数
-
主模式操作:
函数 原型 特点 应用场景 HAL_I2C_Master_Transmit()(hi2c, Addr, *Data, Size, Timeout)阻塞式发送 短数据发送 HAL_I2C_Master_Receive()(hi2c, Addr, *Data, Size, Timeout)阻塞式接收 读取传感器 HAL_I2C_Master_Transmit_IT()(hi2c, Addr, *Data, Size)中断发送 非阻塞 HAL_I2C_Master_Receive_IT()(hi2c, Addr, *Data, Size)中断接收 HAL_I2C_Master_Transmit_DMA()(hi2c, Addr, *Data, Size)DMA发送 大数据量 HAL_I2C_Master_Receive_DMA()(hi2c, Addr, *Data, Size)DMA接收 -
从模式操作:
c// 配置自身地址 hi2c1.Init.OwnAddress1 = 0x30; hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; HAL_I2C_Init(&hi2c1); // 启动从机接收(中断模式) HAL_I2C_Slave_Receive_IT(&hi2c1, rx_buffer, BUFFER_SIZE); // 启动从机发送 HAL_I2C_Slave_Transmit_IT(&hi2c1, tx_buffer, BUFFER_SIZE); -
复合操作(读写寄存器):
c// 写寄存器地址+数据 uint8_t data[2] = {REGISTER_ADDR, DATA_VALUE}; HAL_I2C_Master_Transmit(&hi2c1, SLAVE_ADDR<<1, data, 2, 100); // 读寄存器(带停止和重新开始) HAL_I2C_Master_Transmit(&hi2c1, SLAVE_ADDR<<1, ®_addr, 1, 100); HAL_I2C_Master_Receive(&hi2c1, (SLAVE_ADDR<<1)|0x01, &read_data, 1, 100); // 或使用复合函数 HAL_I2C_Mem_Write(&hi2c1, SLAVE_ADDR<<1, REG_ADDR, I2C_MEMADD_SIZE_8BIT, &data, 1, 100); HAL_I2C_Mem_Read(&hi2c1, SLAVE_ADDR<<1, REG_ADDR, I2C_MEMADD_SIZE_8BIT, &data, 1, 100); -
状态检查:
c// 检查总线是否空闲 if (HAL_I2C_GetState(&hi2c1) == HAL_I2C_STATE_READY) { // 可以开始新传输 } // 检查错误 if (HAL_I2C_GetError(&hi2c1) & HAL_I2C_ERROR_AF) { // 应答错误 }
3.3 高级功能与特性
-
DMA模式传输:
c// 启用DMA传输 __HAL_LINKDMA(&hi2c1, hdmatx, hdma_i2c1_tx); __HAL_LINKDMA(&hi2c1, hdmarx, hdma_i2c1_rx); // DMA传输(非阻塞) HAL_I2C_Master_Transmit_DMA(&hi2c1, SLAVE_ADDR<<1, tx_buffer, BUFFER_SIZE); // 传输完成回调 void HAL_I2C_MasterTxCpltCallback(I2C_HandleTypeDef *hi2c) { if(hi2c == &hi2c1) { transmission_complete = 1; } } -
多主系统处理:
c// 检测总线冲突 if (__HAL_I2C_GET_FLAG(&hi2c1, I2C_FLAG_BUSY)) { // 总线被占用 HAL_Delay(1); // 重试机制 } -
时钟延展控制:
c// 启用时钟延展(从机可拉低SCL) hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; // 禁用时钟延展(提高速度,但兼容性差) hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_ENABLE; -
SMBus模式(系统管理总线):
c// 启用SMBus功能 HAL_I2CEx_EnableSMBusAlert(&hi2c1); // 使能报警 HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE);
3.4 使用示例(完整流程)
3.4.1 示例1:I2C主模式读写EEPROM
c
#define EEPROM_ADDR 0x50
#define EEPROM_PAGE_SIZE 32
uint8_t eeprom_buffer[EEPROM_PAGE_SIZE];
// 1. 初始化I2C
void I2C_Init(void)
{
__HAL_RCC_I2C1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
// 配置GPIO (PB8=SCL, PB9=SDA)
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_8 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// 配置I2C
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x10805E89; // 100kHz
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&hi2c1);
}
// 2. 写EEPROM页
HAL_StatusTypeDef EEPROM_Write_Page(uint8_t page_addr, uint8_t *data, uint8_t size)
{
uint8_t tx_buffer[EEPROM_PAGE_SIZE + 1];
// 第1字节为内存地址
tx_buffer[0] = page_addr * EEPROM_PAGE_SIZE;
memcpy(&tx_buffer[1], data, size);
// 发送数据
return HAL_I2C_Master_Transmit(&hi2c1,
EEPROM_ADDR << 1,
tx_buffer,
size + 1,
100);
}
// 3. 读EEPROM
HAL_StatusTypeDef EEPROM_Read(uint16_t mem_addr, uint8_t *data, uint8_t size)
{
// 先发送内存地址
uint8_t addr_byte = (uint8_t)mem_addr;
HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&hi2c1,
EEPROM_ADDR << 1,
&addr_byte,
1,
100);
if (status != HAL_OK) return status;
// 接收数据
return HAL_I2C_Master_Receive(&hi2c1,
(EEPROM_ADDR << 1) | 0x01,
data,
size,
100);
}
// 4. 使用示例
void EEPROM_Example(void)
{
I2C_Init();
// 写数据
for(int i = 0; i < EEPROM_PAGE_SIZE; i++) {
eeprom_buffer[i] = i;
}
EEPROM_Write_Page(0, eeprom_buffer, EEPROM_PAGE_SIZE);
// 等待写完成(典型5ms)
HAL_Delay(10);
// 读数据
EEPROM_Read(0, eeprom_buffer, EEPROM_PAGE_SIZE);
// 验证
for(int i = 0; i < EEPROM_PAGE_SIZE; i++) {
if(eeprom_buffer[i] != i) {
error_handler();
}
}
}3.4.2 示例2:I2C从模式实现
c
#define SLAVE_ADDR 0x30
#define RX_BUFFER_SIZE 64
uint8_t slave_rx_buffer[RX_BUFFER_SIZE];
uint8_t slave_tx_buffer[RX_BUFFER_SIZE] = "Hello Master!";
volatile uint8_t slave_ready = 0;
// 1. 配置从机
void I2C_Slave_Init(void)
{
__HAL_RCC_I2C1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
// 配置GPIO (同上)
// 配置I2C为从机
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x10805E89;
hi2c1.Init.OwnAddress1 = SLAVE_ADDR;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
// 其他参数同主模式
HAL_I2C_Init(&hi2c1);
// 配置NVIC
HAL_NVIC_SetPriority(I2C1_EV_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(I2C1_EV_IRQn);
HAL_NVIC_SetPriority(I2C1_ER_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(I2C1_ER_IRQn);
// 启动从机接收
HAL_I2C_Slave_Receive_IT(&hi2c1, slave_rx_buffer, RX_BUFFER_SIZE);
}
// 2. 事件中断服务函数
void I2C1_EV_IRQHandler(void)
{
HAL_I2C_EV_IRQHandler(&hi2c1);
}
// 3. 错误中断服务函数
void I2C1_ER_IRQHandler(void)
{
HAL_I2C_ER_IRQHandler(&hi2c1);
}
// 4. 回调函数
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if(hi2c == &hi2c1) {
// 接收完成
slave_ready = 1;
// 启动下一次接收
HAL_I2C_Slave_Receive_IT(hi2c, slave_rx_buffer, RX_BUFFER_SIZE);
// 如果接收到特定命令,准备发送响应
if(slave_rx_buffer[0] == 0xFF) {
HAL_I2C_Slave_Transmit_IT(hi2c, slave_tx_buffer, 12);
}
}
}
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if(hi2c == &hi2c1) {
// 发送完成
HAL_I2C_Slave_Receive_IT(hi2c, slave_rx_buffer, RX_BUFFER_SIZE);
}
}4. 关键注意事项
- 上拉电阻选择:
-
典型值:4.7kΩ
-
计算公式:
cR_pullup > (VDD - VIL) / 3mA -
高速模式:需减小电阻值(如2.2kΩ)
- 时序参数陷阱:
- 必须使用CubeMX 生成
Timing值 - 手动计算极易出错
- 不同PCLK1频率需要不同Timing
- 地址格式:
-
7位地址:实际传输时左移1位
c// 7位地址0x50 → 传输0xA0(写)或0xA1(读) HAL_I2C_Master_Transmit(&hi2c1, 0x50<<1, data, size, timeout); -
10位地址 :使用
I2C_ADDRESSINGMODE_10BIT
- 总线锁定处理:
c
// I2C总线锁定恢复程序
void I2C_Recovery(void)
{
// 9个时钟脉冲
for(int i = 0; i < 9; i++) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
HAL_Delay(1);
}
// 生成停止条件
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
HAL_Delay(1);
}- DMA传输陷阱:
-
必须链接DMA句柄:
c__HAL_LINKDMA(&hi2c1, hdmatx, hdma_i2c1_tx); -
Cache一致性:
cSCB_CleanDCache_by_Addr((uint32_t*)tx_buffer, size); SCB_InvalidateDCache_by_Addr((uint32_t*)rx_buffer, size);
4.1 H750特有优化技巧
| 场景 | 解决方案 | 性能提升 | 实现要点 |
|---|---|---|---|
| 高速通信 | 400kHz Fast Mode | 速度×4 | Timing=0x00702991 |
| 长距离传输 | 增强上拉 | 可靠性↑ | 总线电容<400pF |
| 多设备系统 | 地址扫描 | 调试方便 | 遍历0x08-0x77 |
| 低功耗 | STOP模式唤醒 | 功耗↓ | 从机模式响应 |
避坑指南:
- H750 I2C架构:
- 支持SMBus Alert和PEC校验
- 可配置数字滤波器抑制噪声
- GPIO复用选择:
c// I2C1可映射到不同引脚 __HAL_RCC_GPIOB_CLK_ENABLE(); GPIO_InitStruct.Alternate = GPIO_AF4_I2C1; // PB6/PB7 // 或 __HAL_RCC_GPIOC_CLK_ENABLE(); GPIO_InitStruct.Alternate = GPIO_AF4_I2C1; // PC6/PC7
- 中断优先级:
- I2C事件中断(EV)优先级 高于 错误中断(ER)
- 否则错误可能无法及时处理
- 生产环境测试:
- 使用逻辑分析仪验证时序
- 测试最坏情况下的总线负载
- 验证从机的时钟延展兼容性
4.2 I2C模式性能对比
| 模式 | SCL频率 | Timing配置 | 典型应用 |
|---|---|---|---|
| Standard | 100kHz | 0x10805E89 |
传感器、EEPROM |
| Fast | 400kHz | 0x00702991 |
高速数据采集 |
| Fast+ | 1MHz | 0x00300B29 |
视频传输 |
重要提示:
- I2C是最常用的串行总线,但时序要求严格
- 上拉电阻是可靠通信的关键
- 从机模式需要完善的中断处理机制
- DMA模式可释放CPU资源用于大数据传输
文中代码下载:https://github.com/hazy1k/STM32H7-Quick-Start-Guide-CubeIDE/tree/main/2.code