主要围绕深度学习中 前向反向传播的搭建原理。
目录
[1. 大语言模型导言](#1. 大语言模型导言)
[编码 + Attention + 基本组件](#编码 + Attention + 基本组件)
[Decoder-only 架构](#Decoder-only 架构)
[2. 前向传播](#2. 前向传播)
[3. 反向传播](#3. 反向传播)
[Autograd -> 计算图 DAG](#Autograd -> 计算图 DAG)
[hw0:手搓一个线性层 Manual_Linear 并手动计算梯度](#hw0:手搓一个线性层 Manual_Linear 并手动计算梯度)
1. 大语言模型导言
https://njudeepengine.github.io/llm-course-lecture/2025/lecture1.html#1
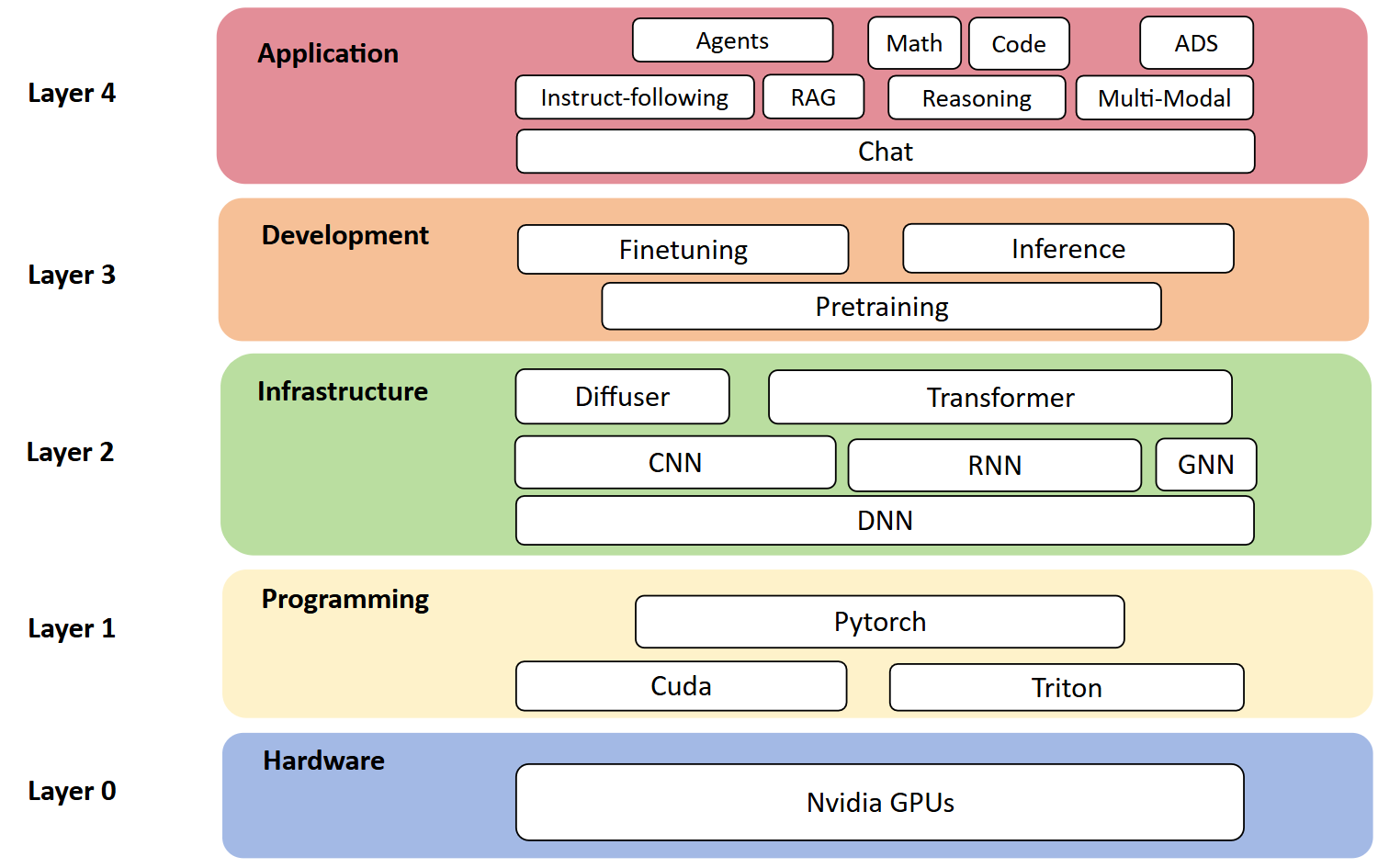
硬件 -> 编程基础+深度学习框架 -> 神经网络架构 -> 模型的开发部署 -> 实际应用场景
编码 + Attention + 基本组件
语言模型,源于如何建模自然语言?比如如何解释"什么是南京大学"。
把"南京大学"输入模型,就需要一个编码器encoder去转换这四个字。
如何认识单词?编码:one-hot编码, word2vec(上下文完形填空训练), tokenization
经典向量投射例子 king - man = queen - woman
如何理解语言 ?多次 Attention 算两两之间字词的意思关系。
基础组件(积木):残差(residual), layernorm, attention, softmax, positional embedding
大规模训练 多卡多机:需要分布式运行
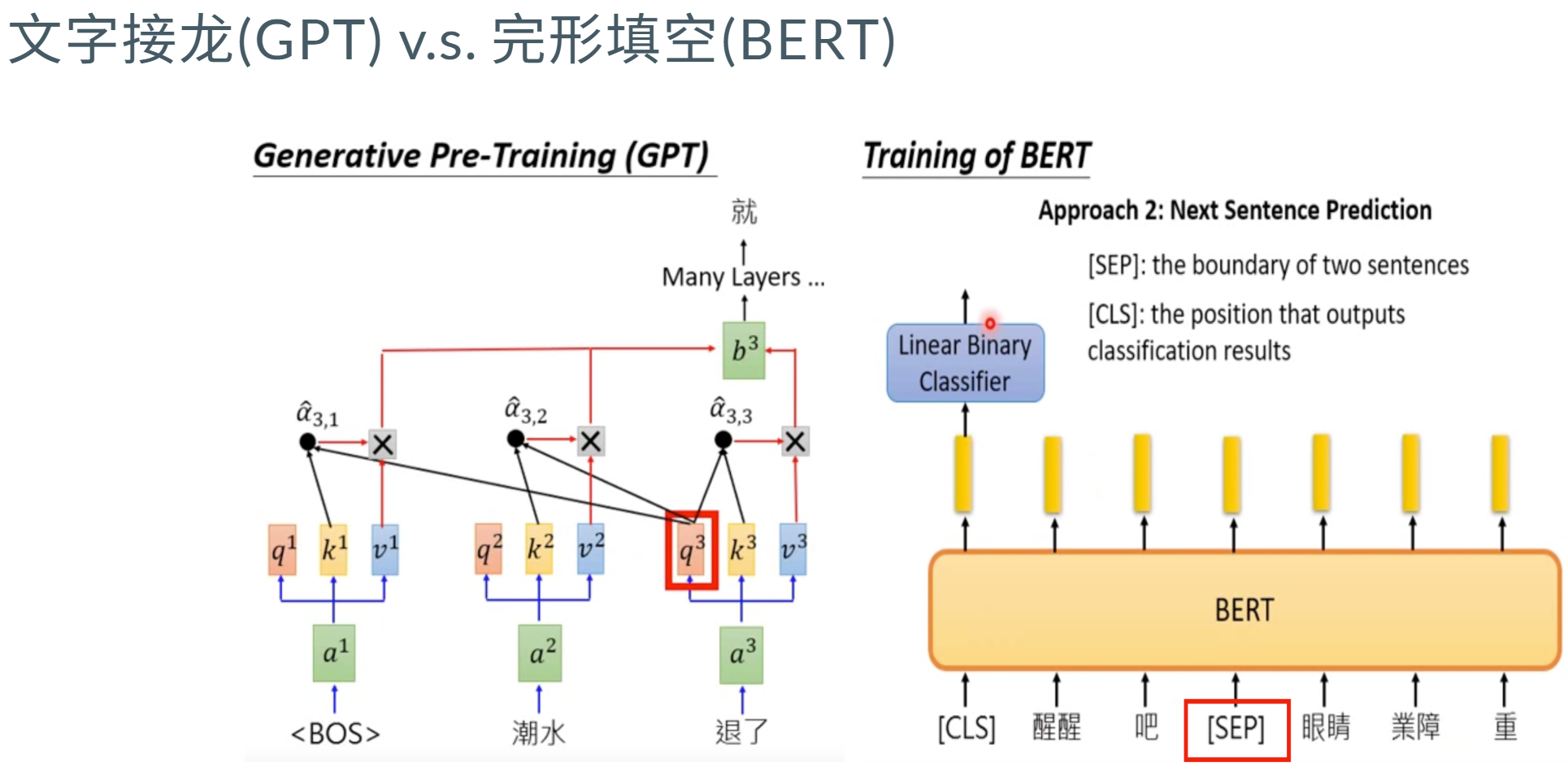
Decoder-only 架构
在BERT时代 虽然上下文完形填空 和生成 过程有些矛盾 ,但当时有一些训练效果(比只预测下文好训练 decoder-only每个位置所能接触的信息比其他架构少,要预测下一个token难度更高 ,但上限更高)。
后来模型参数量提高后 显卡和数据比较多后 GPT能力大大增强。
目前生成能力 还是以 GPT 为代表的Decoder-only架构为主。
下游任务 zero/few-shot 泛化性能好。
Encoder的双向注意力会存在低秩 问题,这可能会削弱模型表达能力,就生成任务 而言,引入双向注意力 并无实质好处。而Encoder-Decoder架构之所以能够在某些场景下表现更好,大概只是因为它多了一倍参数 。所以,在同等参数量、同等推理成本下,Decoder-only架构就是最优选择了。
2. 前向传播
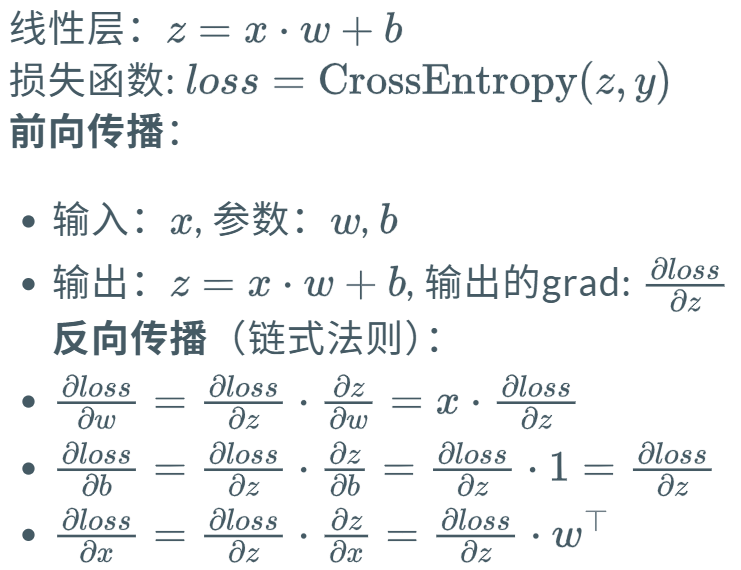
前向传播:从输入到输出,计算预测结果
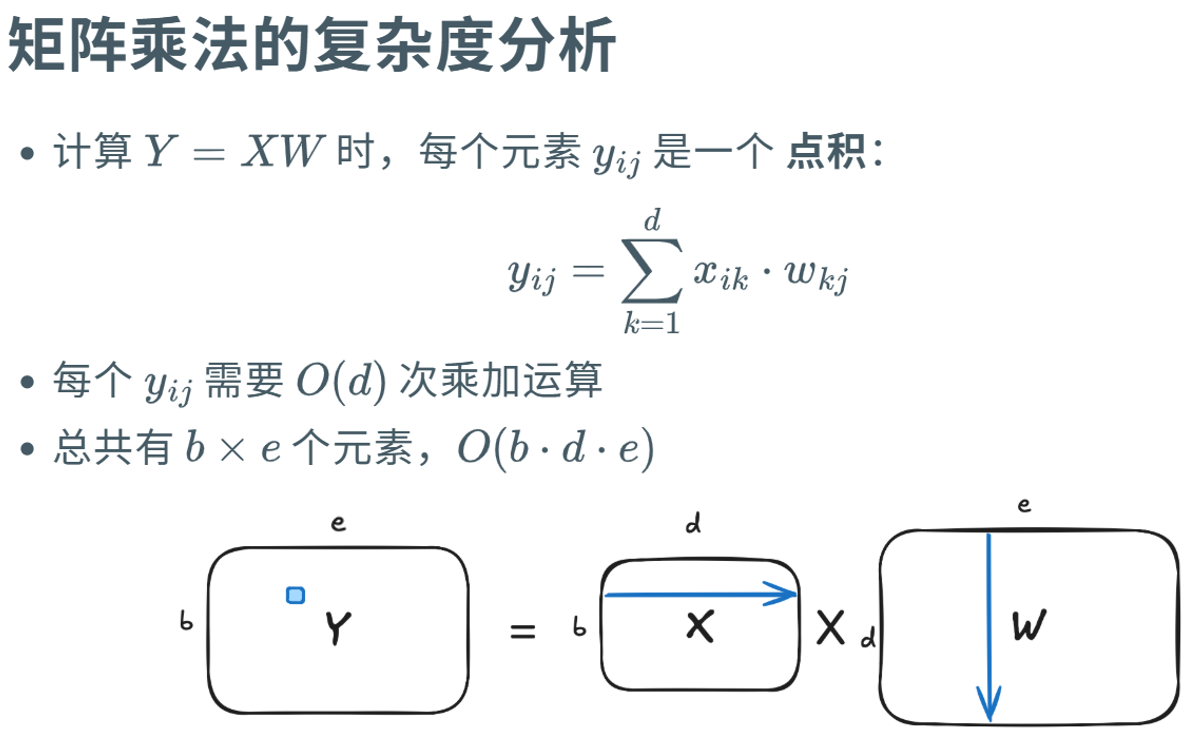
矩阵乘法 与 元素乘法
python
# 矩阵乘法
y = x@w
y = x.matmul(w)
y = torch.matmul(x, w)
# 元素乘法
y = x*w
y = x.mul(w)
y = torch.mul(x, w)层的堆叠 x是128个样本 每个样本20维度;m1 20->30 m2 30->40.
python
m1 = nn.Linear(20, 30)
m2 = nn.Linear(30, 40)
x = torch.randn(128, 20)
y1 = m1(x)
y2 = m2(y1)3. 反向传播
https://njudeepengine.github.io/llm-course-lecture/2025/lecture3.html#1
反向传播:从输出到输入,计算梯度,更新参数
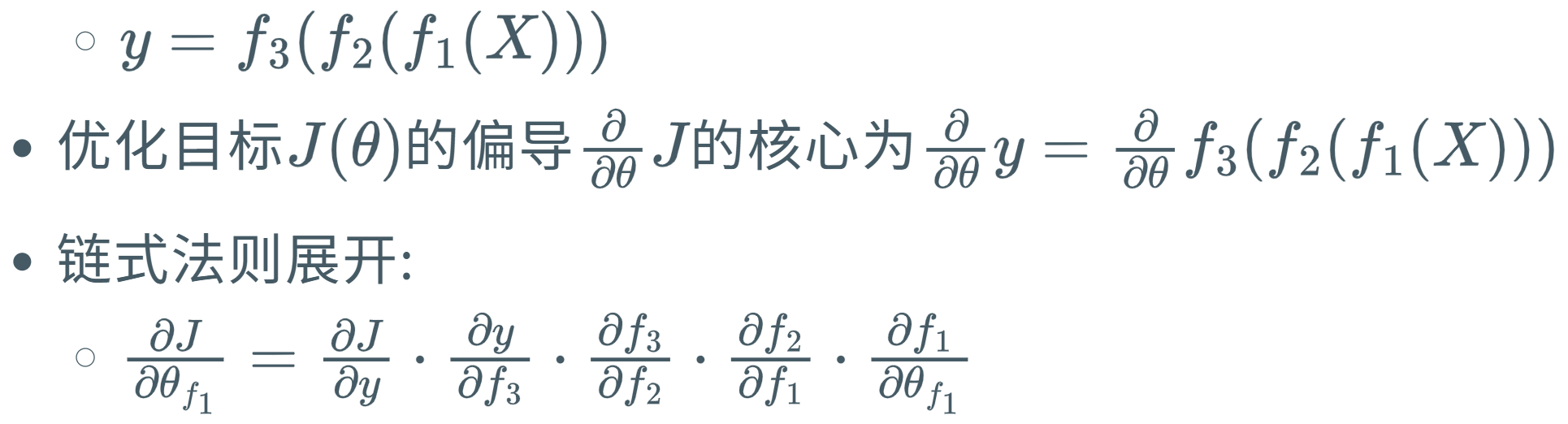
核心思想:通过链式法则计算复合函数的导数
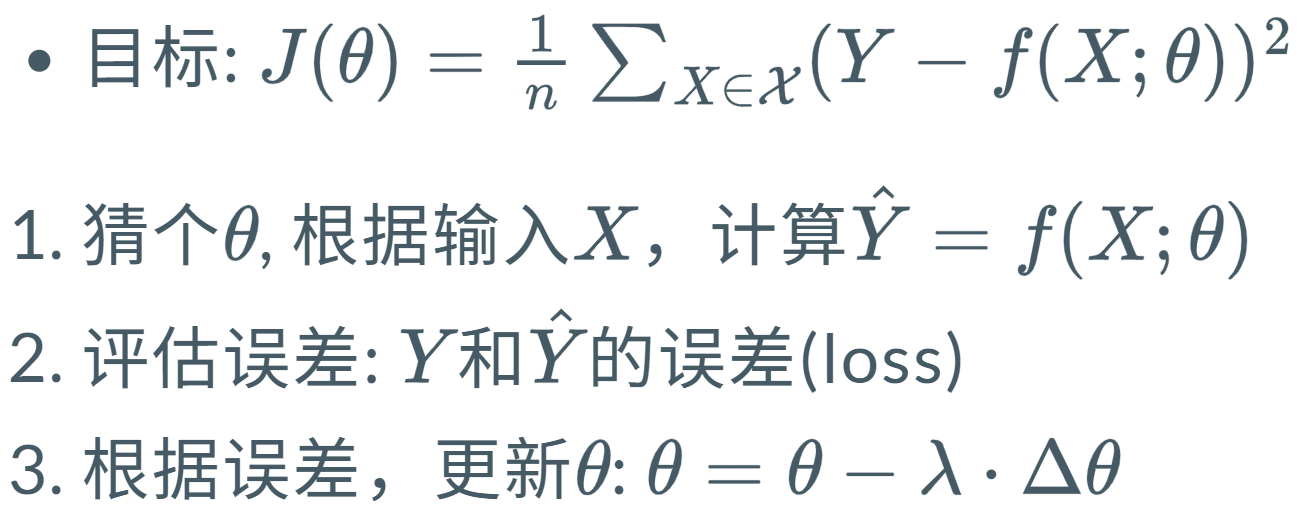
- 目标 :找到使损失函数最小的参数Y=XW 找那个W
- 方法 :梯度下降,需要计算损失函数对每个参数的梯度
- 挑战 :深度学习模型是复合函数,直接计算梯度困难
- 解决 :反向传播算法,针对优化目标 J(θ) 按层"回退",一层一层求偏导
很多层进行 复合函数
Autograd -> 计算图 DAG
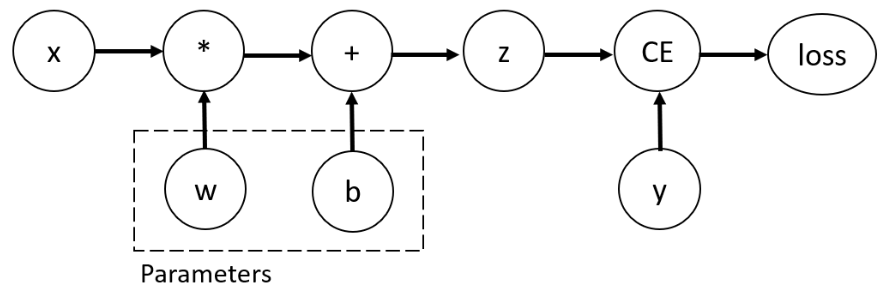
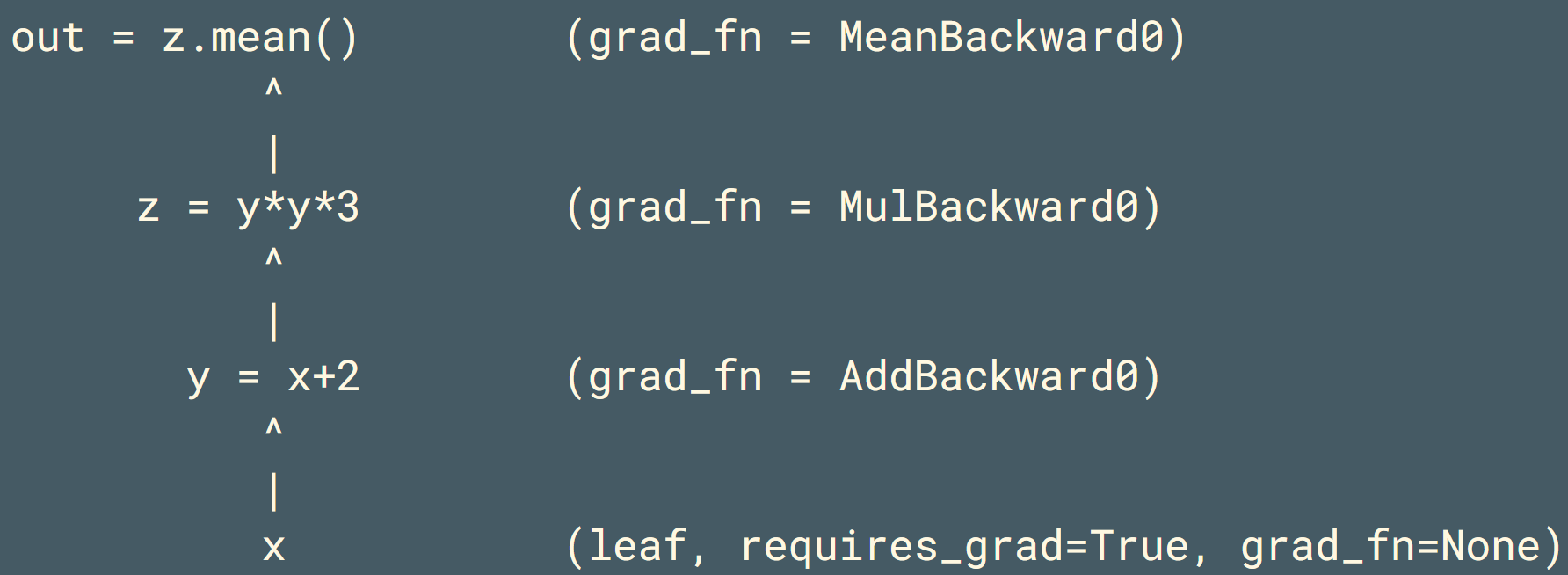
非叶子节点 记录 grad_fn 描述生成该tensor的运算方式,即描述反向传播时如何计算梯度。
print tensor 时既包含张量值 也包含grad_fn。
python
import torch
x = torch.ones(2, 2, requires_grad=True)
y = x + 2
z = y * y * 3
out = z.mean()
print(x.grad_fn) # None,因为x是叶子张量
print(y.grad_fn) # <AddBackward0>,表示加法操作
print(z.grad_fn) # <MulBackward0>,表示乘法操作
print(out.grad_fn) # <MeanBackward0>,表示 mean 操作Autograd的无感知使用
backward() 启动反向传播计算;之前清空梯度;之后更新梯度
python
optimizer = torch.optim.SGD(net.parameters(), lr=0.01)
for epoch in range(100):
# 前向传播
y = net(x)
loss = criterion(y, target)
# 反向传播
optimizer.zero_grad() # 清零梯度
loss.backward() # 计算梯度
optimizer.step() # 更新参数with torch.no_grad(): 上下文内不记录计算图,不分配 grad_fn/中间量,因此这些计算不参与 loss.backward()。
用途: 纯推理/验证(配合 model.eval())。
比如用于模型蒸馏 小模型学大模型的输出。两者都要前向操作 然后更新小模型需要grad 大模型不需要grad
hw0:手搓一个线性层 Manual_Linear 并手动计算梯度
A0 Onboarding | LLM-Assignment-Doc
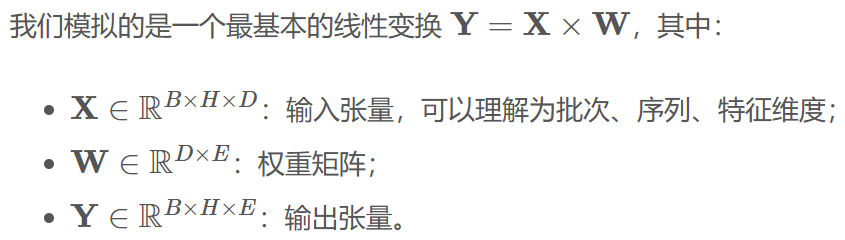
我们进一步定义一个标量损失函数 loss = (Y ** 2).sum()
首先初始化 权重矩阵W(也要同步给测试的输入) W_grad 梯度初始化为零矩阵。
python
class ManualLinear:
def __init__(self, in_dim, out_dim, device=None, dtype=torch.float32):
# 初始化权重矩阵 W,随机值,形状为 [输入维度, 输出维度]
# requires_grad=False 是关键!因为我们手动计算梯度,不需要autograd帮忙
self.W = torch.randn(in_dim, out_dim, device=device, dtype=dtype, requires_grad=False)
# 初始化一个全0的张量,用来存储我们手动计算出的权重梯度 dL/dW
self.W_grad = torch.zeros_like(self.W)进一步,完整的 forward 过程即:

使用 Y = X @ w @进行矩阵乘法
python
def forward(self, x):
# 保存输入x,反向传播计算 dL/dW = X^T @ (dL/dY) 时会用到!
self.input = x
return x @ self.Wbackward 的计算过程:
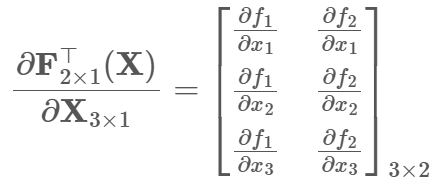
首先关于梯度/偏导 需要满足矩阵shape一致性:
分母布局求导(主流深度学习框架默认) 每行为每个分母对应梯度


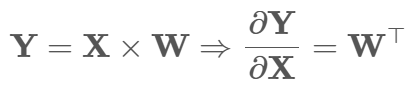
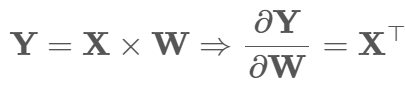
此外 由于乘法求导等于转置 可进一步化为
在实现的过程中 由于输入x 是三维的;第一个维度为批量大小b,所以需要合并前两维(展平)
python
def backward(self, grad_output):
# grad_output 就是从后面一层传回来的梯度 dL/dY, 形状是 [b, h, e]
# 获取输入X的维度,以便后续reshape操作
b, h, d = self.input.shape
# 我们需要把 batch 和 h 维度合并,看作一个大的"样本"维度。
# 将输入X从 [b, h, d] 重塑为 [b*h, d]
# 这相当于把多个样本在批次维度上拼接起来
x_flat = self.input.reshape(-1, d)
# 同样,将上游梯度 grad_output 从 [b, h, e] 重塑为 [b*h, e]
grad_out_flat = grad_output.reshape(-1, self.W.shape[1])
# 现在执行矩阵乘法: [d, b*h] @ [b*h, e] -> [d, e]
# x_flat.T 的形状是 [d, b*h]
# grad_out_flat 的形状是 [b*h, e]
# 它们相乘的结果正好是 [d, e],和权重W的形状一致!
# 这个操作在数学上等价于:对batch中的每一个样本计算 x_i^T @ (dL/dY_i),然后把所有结果加起来。
self.W_grad = x_flat.T @ grad_out_flat
grad_input = grad_output @ self.W.T
return grad_input # 将梯度返回,用于前一层的反向传播step 根据学习率 梯度下降更新;减去学习率lr * 梯度W
python
# 梯度下降更新
def step(self, lr=1e-2):
self.W -= lr * self.W_gradManual_Linear调用 Y**2 对 Y 偏导就是 2Y;作为上一层的grad_output 送给backward
python
manual_linear = ManualLinear(d, e, device=device, dtype=dtype)
y_manual = manual_linear.forward(x)
loss_manual = y_manual.pow(2).sum()
grad_output = 2 * y_manual
grad_input_manual = manual_linear.backward(grad_output)使用pytest 比较与 PyTorch AutogradLinear 自动求导机制与手动计算的一致性。
手动计算时 randn生成的W权重复制过来
.requires_grad 梯度跟踪的X 和 Y 随后才能用 .grad
计算平方和损失 .backward()自动计算梯度; 得到对X和W的梯度
三个assert断言 前向传播结果,对X和W的梯度
python
# 创建一个使用PyTorch自动求导的线性层实例
autograd_linear = AutogradLinear(d, e, device=device, dtype=dtype)
# 关键步骤:确保两个模型的初始权重完全一致,才能进行公平比较
with torch.no_grad():
# 将手动线性层的权重数值复制到自动求导线性层的权重中
autograd_linear.W.copy_(manual_linear.W)
# 准备用于自动求导的输入数据
# .requires_grad_():要求对这个新张量进行梯度跟踪,这样autograd才能计算关于它的梯度
x_autograd = x.clone().detach().requires_grad_()
y_autograd = autograd_linear(x_autograd) # x->y
loss_autograd = y_autograd.pow(2).sum() # 平方和损失
loss_autograd.backward() # 反向传播 自动计算梯度
grad_input_autograd = x_autograd.grad # X梯度
grad_weight_autograd = autograd_linear.W.grad # W梯度
# ========== 验证阶段:对比手动实现 vs 自动求导 ==========
# 断言1:验证前向传播结果是否一致
torch.testing.assert_close(y_manual, y_autograd, rtol=1e-4, atol=1e-4)
# 断言2:验证输入梯度是否一致
# 检验手动实现的 dL/dx = grad_output @ W^T 公式是否正确
torch.testing.assert_close(grad_input_manual, grad_input_autograd, rtol=1e-4, atol=1e-4)
# 断言3:验证权重梯度是否一致
# 检验手动实现的 dL/dW = x^T @ grad_output 公式是否正确
torch.testing.assert_close(manual_linear.W_grad, grad_weight_autograd, rtol=1e-4, atol=1e-4)