目标检测 | 基于Weiler--Atherton算法的IoU求解
IoU
交并比(Intersection over Union, IoU) 是计算机视觉领域中常用的一个评价指标,尤其在目标检测与图像分割任务中,用于衡量预测结果与真实标注之间的重合程度。
其定义如下:

- 如图所示给定任意两个多边形框\(B_1, B_2\)(预测框与真实框),其 IoU 的计算公式为:
\\\text{IoU}(B_1, B_2) = \\frac{\|B_1 \\cap B_2\|}{\|B_1 \\cup B_2\|} \\
其中\(|B_1 \cup B_2|\)为二者并集的面积,\(|B_1 \cap B_2|\)为二者交集的面积。
IoU的取值范围为\(0,1\),当\(IoU=1\)时表示预测框与真实框完全一致 ;当\(IoU=0\)时表示预测框与真实框没有任何重叠;
通过评价\(IoU\)可以评估目标检测模型的性能
基于Weiler--Atherton算法的IoU求解
Bounding Box
在目标检测任务中,通常使用 包围盒(bounding box) 表示目标的矩形区域。根据任务需求的不同,包围盒可以分为以下几类:
-
轴对齐包围盒(Axis-Aligned Bounding Box,AABB)
轴对齐包围盒一般应用于2D的目标检测任务,四条边分别与x轴和y轴对齐,可以表达为:
\B_\\text{AABB} = (x_c, y_c, w, h), \\quad w \> 0, \\, h \> 0 \\
- 其中\((x_c,y_c)\)为中心坐标,\(w,h\)分别为包围盒的宽和高,也被称为外延(extent)
-
BEV包围盒(Bird's Eye View Bounding Box,BEV Boudning Box)
BEV包围盒一般用于自动驾驶任务,在俯视图(BEV)中,每个物体除了位置和尺寸外,还包含一个航向角(yaw)表示方向,可以表达为:
\B_\\text{BEV} = (x_c, y_c, l, w, \\theta), \\quad l \> 0, \\, w \> 0, \\, \\theta \\in \[-\\pi, \\pi) \\
- 其中\((x_c,y_c)\)为中心坐标,\(l,w\)分别为包围盒的长和宽,\(\theta\)为全局坐标系的旋转角度
-
3D包围盒(3D Boudning Box)
3D包围盒在BEV包围盒的基础上增加了高度,也是自动驾驶任务中常用的表示格式
\B_\\text{3D} = (x_c, y_c, z_c, l,w,h, \\theta), \\quad w, l, h \> 0, \\, \\theta \\in \[-\\pi, \\pi) \\
- 其中\((x_c,y_c,z_c)\)为中心坐标,\(l,w,h\)分别为包围盒的长,宽和高,\(\theta\)为全局坐标系的旋转角度
在本文中,我们以 BEV 包围盒 为例,使用 Weiler--Atherton 算法求解 IoU。对于3D包围盒的 IoU 计算,可通过将 BEV 包围盒在俯视平面上的结果拓展到高度方向来实现。
Corner坐标转换
在计算之前,我们首先需要将多边形从包围盒表示转换为Corner坐标表示(四个顶点的坐标),这个过程可以分为三步,首先给定一个包围盒:
\B_\\text{BEV} = (x_c, y_c, l, w, \\theta), \\quad l \> 0, \\, w \> 0, \\, \\theta \\in \[-\\pi, \\pi) \\
计算局部坐标系下的四个角点
\P\^\\text{local} = \\begin{bmatrix} +\\frac{l}{2} \& +\\frac{w}{2} \\\\ +\\frac{l}{2} \& -\\frac{w}{2} \\\\ -\\frac{l}{2} \& -\\frac{w}{2} \\\\ -\\frac{l}{2} \& +\\frac{w}{2} \\end{bmatrix} \\in \\mathbb{R}\^{4\\times 2} \\
绕中心旋转矩阵
\P\^\\text{rotated} = P\^\\text{local} \\cdot R(\\theta)\^\\top \\
其中:
\R(\\theta) = \\begin{bmatrix} \\cos\\theta \& -\\sin\\theta \\\\ \\sin\\theta \& \\cos\\theta \\end{bmatrix} \\
平移到全局坐标系
\P\^\\text{global}=P\^\\text{rotated}+ \\begin{bmatrix} x_c \& y_c \\\\ x_c \& y_c \\\\ x_c \& y_c \\\\ x_c \& y_c \\end{bmatrix} \\
将上述的三个过程合并为齐次坐标系矩阵:
\\\begin{bmatrix} x_1 \& y_1 \& 1 \\\\ x_2 \& y_2 \& 1 \\\\ x_3 \& y_3 \& 1 \\\\ x_4 \& y_4 \& 1 \\end{bmatrix} = \\begin{bmatrix} + \\frac{l}{2} \& + \\frac{w}{2} \& 1 \\\\ + \\frac{l}{2} \& - \\frac{w}{2} \& 1 \\\\ - \\frac{l}{2} \& - \\frac{w}{2} \& 1 \\\\ - \\frac{l}{2} \& + \\frac{w}{2} \& 1 \\end{bmatrix} \\cdot \\begin{bmatrix} \\cos\\theta \& \\sin\\theta \& x_c \\\\ -\\sin\\theta \& \\cos\\theta \& y_c \\\\ 0 \& 0 \& 1 \\end{bmatrix} \\
Weiler--Atherton算法
Weiler--Atherton算法是一种计算任意两个非凹图形交集的算法,可以被分为四个步骤:
- 求解所有相交点
- 求解所有被包围的顶点
- 将相交点和被包围的顶点放入一个数组中,按照逆时针进行排序
- 按照顺序连接为新的多边形求解其面积
给定任意两个包围盒的Cornor坐标表示\(B_1,B_2\in\mathbb{R}^{4 \times 2}\)

计算所有相交点
给定任意两条线段\(L_1=(x_1,y_1),L_2=(x_2,y_2)\)与\(M_1=(x_3,y_3),M_2=(x_4,y_4)\),我们可以如下求出其交点:
定义\(r=L_2-L_1,s=M_2-M_1\),有:
\t=\\frac{(M_1-L_1)\\times s}{r\\times s},u=\\frac{(M_1-L_1)\\times r}{r\\times s} \\
其中\(\times\)为二维向量叉乘,定义如下:
\(x_1,y_1)\\times(x_2,y_2)=x_1y_2 - y_1x_2 \\
那么线段\(P,Q\)的交点为:
\P_{insect}= \\begin{cases} L_1 + t r, \& \\text{if } r\\times s \\neq 0 \\text{ and } t \\in \[0,1, u \in 0,1 \\1ex \text{无交点}, & \text{otherwise} \end{cases} \]
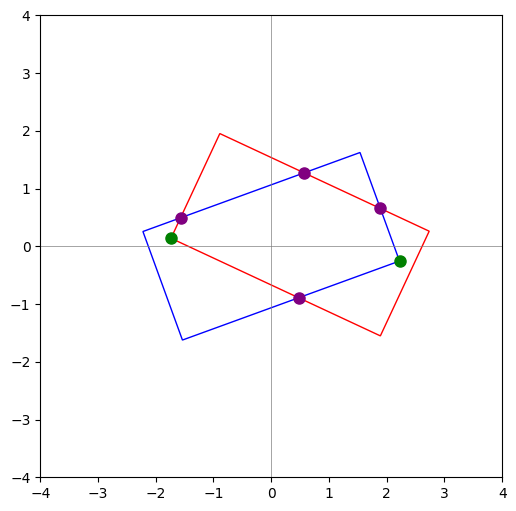
通过线段相交算法我们可以求出任意两个线段之间的交点(如图所示的紫色点)

计算所有被对方包围起来的顶点
给定任意一个包围盒\(B\in\mathbb{R}^{4 \times 2}\)与点\(P\),我们可以通过如下过程求解点\(P\)是否在包围盒\(B\)中:
定义\(P_a=B0, :,P_b=B1, :,P_d=B3, :\)
求得:
\t=\\frac{AP\\cdot AB}{\|\|AB\|\|\^2},u=\\frac{AP\\cdot AD}{\|\|AD\|\|\^2} \\
其中\(AB=P_b-P_a,\ AD=P_d-P_a,\ AP = P-P_a\)
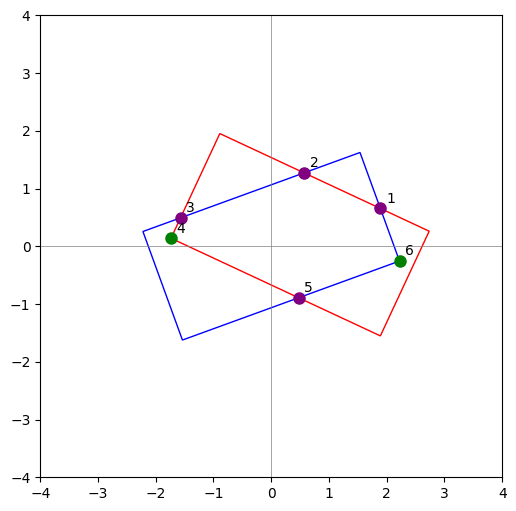
如图所示,当\(t\in0,1\and u\in0,1\)时,点\(P\)位于包围盒中\(B\)

通过上述流程我们可以求解所有在对方包围盒的顶点(如图所示的绿色点)
顶点极角排序
为了方便连接每个顶点,接下来我们将所有顶点按照极坐标系下的角度进行排序,给定任意两点\(P_1(x_1,y_1)\)与\(P_2(x_2,y_2)\),有比较函数如下:
\\\text{cmp}(P_1,P_2) = \\begin{cases} \\text{true}, \& \\Theta_{P_1} \< \\Theta_{P_2} \\\\\[0.5em \text{false}, & \Theta_{P_1} \geq \Theta_{P_2} \\0.5em \end{cases} \]
其中
\\\Theta_P = \\begin{cases} \\arctan2(y, x), \& \\arctan2(y, x) \\ge 0 \\\\ \\arctan2(y, x) + 2\\pi, \& \\arctan2(y, x) \< 0 \\end{cases} \\
但是\(\arctan2\)这个操作非常消耗资源,所以我们不会直接计算极角\\theta ,我们会进行如下优化:
给定极坐标系的坐标(r,\\theta) \\(,我们可以构建一个关于\\)\\theta\\(的函数\\)g(\\theta)=\|\\cos\\theta\|\\cos\\theta,这个函数会在第一,二象限递减,第三,四象限递增,接下来有:
\\\begin{align} g(\\theta) \& = \\frac{r\^2}{r\^2} \\, g(\\theta) \\\\ \& =\\frac{r\^2 \\, \|\\cos\\theta\| \\cos\\theta}{r\^2}\\\\ \& =\\frac{\|r \\cos\\theta\| \\cdot (r \\cos\\theta)}{r\^2} \\\\ \\end{align} \\
其中我们将极坐标系公式代入原式:
\x = r \\cos\\theta, \\quad y = r \\sin\\theta, \\quad r = \\sqrt{x\^2 + y\^2} \\
得到:
\\\begin{align} g(\\theta) \&=\\frac{\|r \\cos\\theta\| \\cdot (r \\cos\\theta)}{r\^2} \\\\ \&=\\frac{\|x\|\\cdot x}{x\^2+y\^2} \\end{align} \\
在实际计算中为了防止除0我们会在分母加上一个非常小的数\(\varepsilon\):
\g(\\theta) =\\frac{\|x\|\\cdot x}{x\^2+y\^2+\\varepsilon} \\
我们可以给出优化版本的比较函数\(\text{cmp}(\cdot,\cdot)\):
\\\text{cmp}(P_1,P_2) = \\begin{cases} \\text{false}, \& (x_1,y_1) = (x_2,y_2) \\\\\[0.5em \text{true}, & y_1 > 0,\, y_2 < 0 \\0.5em \text{false}, & y_1 < 0,\, y_2 > 0 \\0.5em \text{true}, & y_1 > 0,\, y_2 > 0,\, g(\theta_1) > g(\theta_2) \\0.5em \text{true}, & y_1 < 0,\, y_2 < 0,\, g(\theta_1) < g(\theta_2) \\0.5em \end{cases} \text{其中 } g(\theta) = \frac{|x|\cdot x}{x^2+y^2+\varepsilon} \]
形成新的多边形并计算面积
给定任意二维向量\(L=(x_1,y_1),M=(x_2,y_2)\),我们可以求解二者共同起点所构成的三角形面积\(S_{LM}\):
\S_{LM}=\\frac{1}{2}\|L\\times M\|=\\frac{1}{2}\|x_1y_2-y_1x_2\| \\
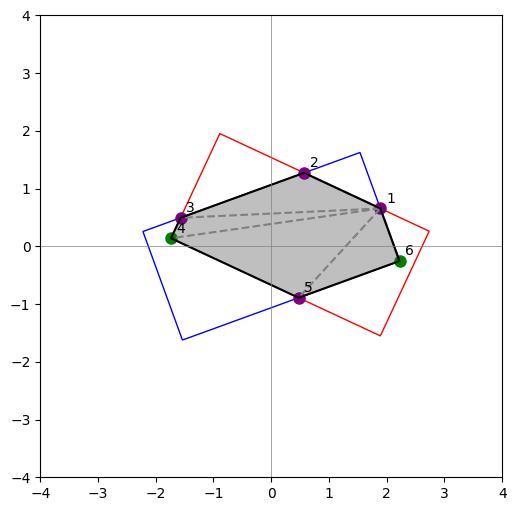
给定已经按照极角进行排序的点集\(\{P_1,\dots,P_n|n\leq8\}\),我们可以将这些点按照顺序连接为一个闭合的多边形\(I\),这个多边形由\(n-2\)个三角形所组成,每个三角形\(S_n\)的面积为\(S_n=\frac{1}{2}|(P_{n+1}-P_1)\times (P_{n+2}-P_1)|\),那么我们可以算出这个多边形的面积:
\S_{I}=\\sum\^{n-2}_{i=1}\\frac{1}{2}\|(P_{i+1}-P_1)\\times (P_{i+2}-P_1)\| \\

计算IoU
上文我们已经得到BEV包围盒\(B_1\)与\(B_2\)的交集面积为\(S_I\),那么我们可以如下算得\(IoU\):
\IoU =\\frac{Intersection}{Union}= \\frac{S_I}{S_{B_1}+S_{B_2}-S_I} \\
如果\(B_1,B_2\)为3D包围盒,可以如下增加一个高度项:
\IoU =\\frac{Intersection}{Union}= \\frac{H_I}{H_U}\\frac{S_I}{S_{B_1}+S_{B_2}-S_I} \\
其中
\\\begin{align} H_I=\&\\max(0,\\min(z_{B_1}+\\frac{h_{B_1}}{2}, z_{B_1}+\\frac{h_{B_2}}{2})-\\max(z_{B_1}-\\frac{h_{B_1}}{2},z_{B_2}-\\frac{h_{B_2}}{2}))\\\\H_U=\&h_{B_1}+h_{B_2}-H_I \\end{align} \\
参考文献
https://en.wikipedia.org/wiki/Weiler--Atherton_clipping_algorithm