在之前博主发过petalinux开发流程的博文,其中需要将生成的文件放在SD卡的对应分区,今天讲解一下,SD卡如何在ubuntu上进行分区操作。
将SD卡插入读卡器,读卡器连接电脑,弹窗选择连接虚拟机ubuntu,而非windows电脑。
SD卡分区操作
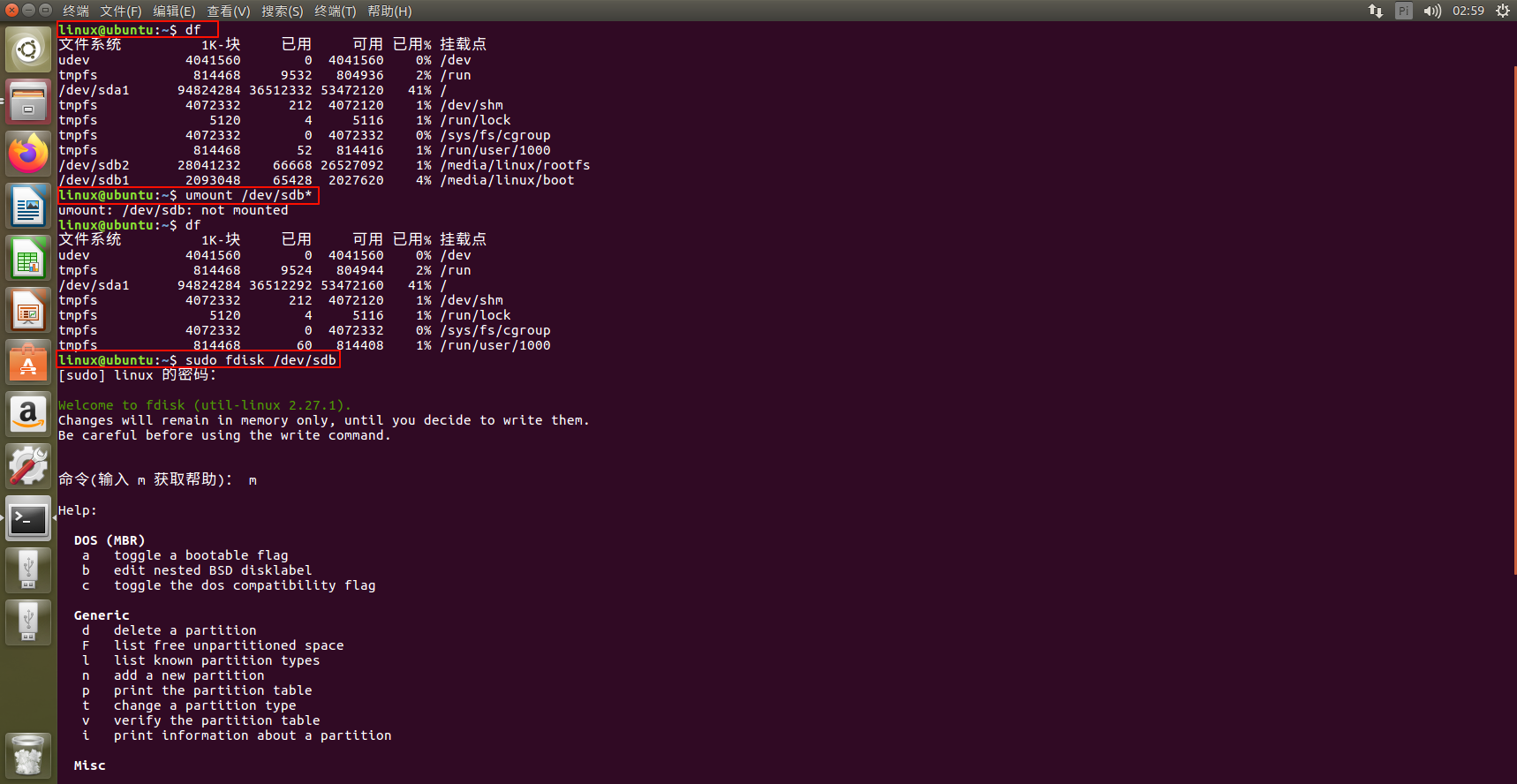
打开ubuntu终端,df 命令可以查看SD卡现有的分区情况;umount /dev/sdb* 命令取消SD卡挂载;sudo fdisk /dev/sdb命令开始分区操作,可以看到许多操作指令。
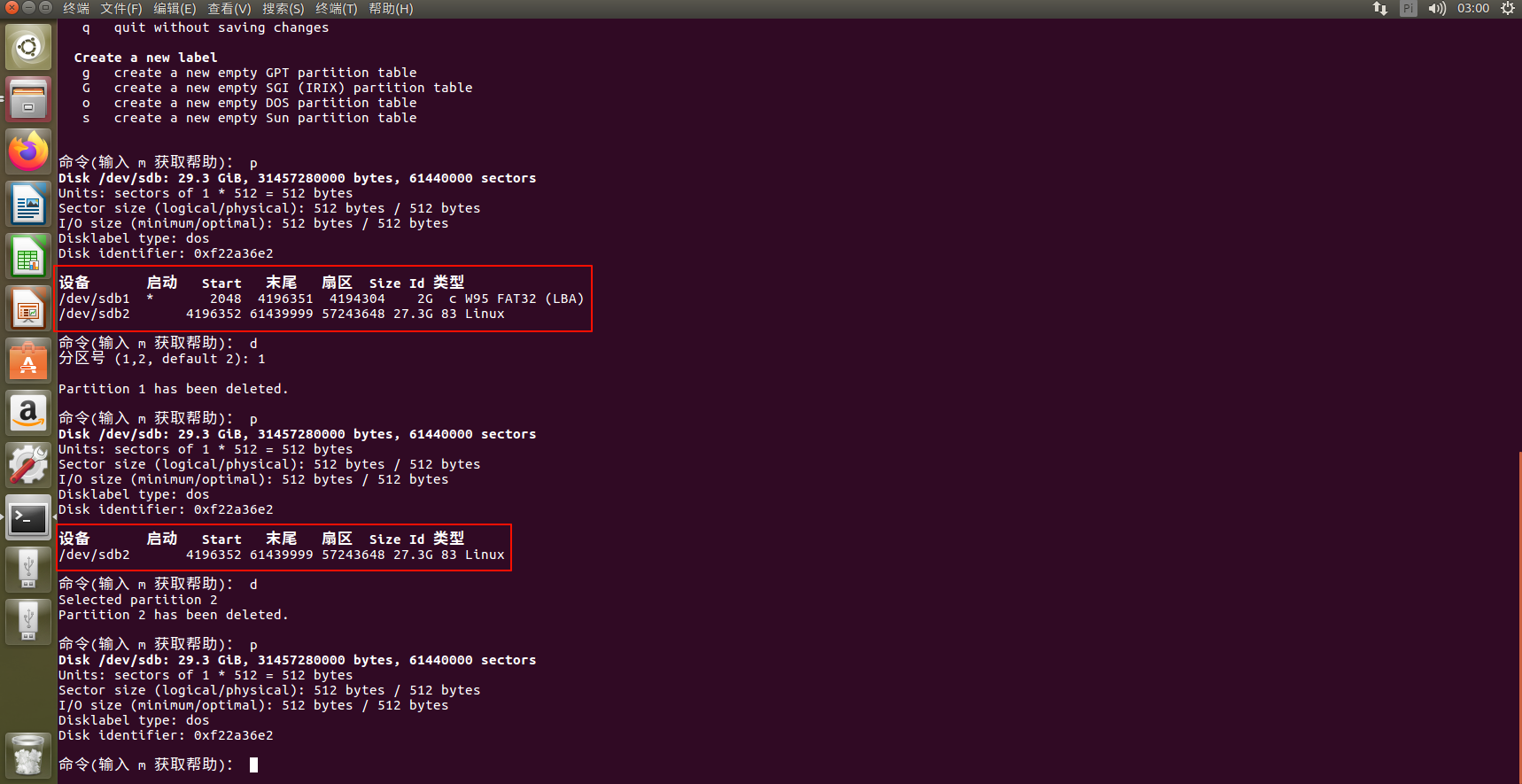
输入p 打印分区情况,输入d删除现有的分区。
输入n 创建分区,步骤:分区类型为主分区,输入p ;选择分区大小,+1G (根据需求选,+2G、+500M等)。输入p 打印分区信息。输入t、L 修改分区类型,根据提供的分区类型列表选择,选择c W95 FAT32 (LBA)。
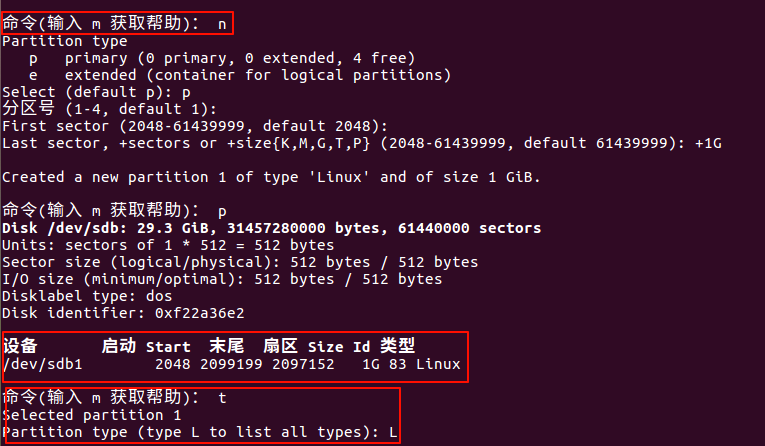
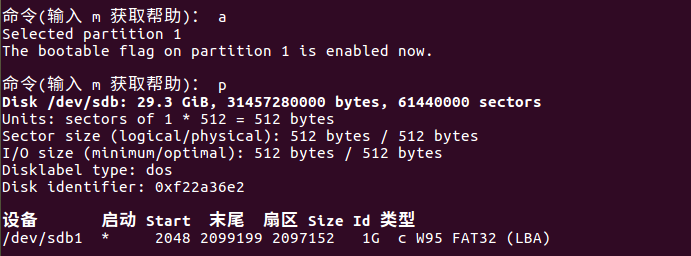
输入a,将创建的第一分区使能为boot启动。
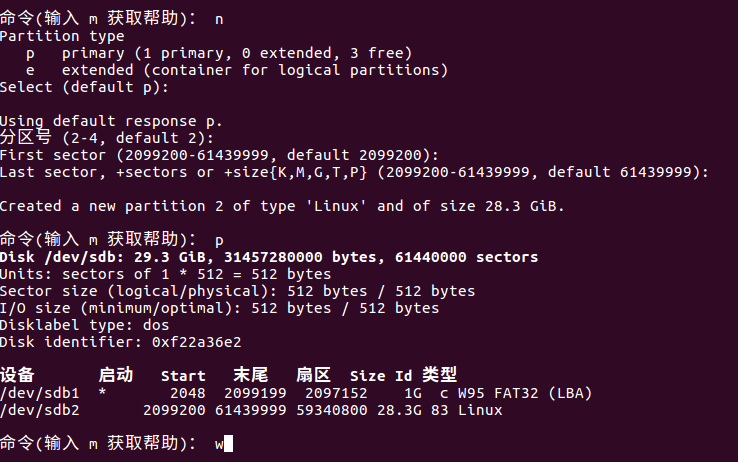
第二分区操作相同,输入n创建分区,第二分区的类型不用更改,就是 83 Linux。输入w保存退出。
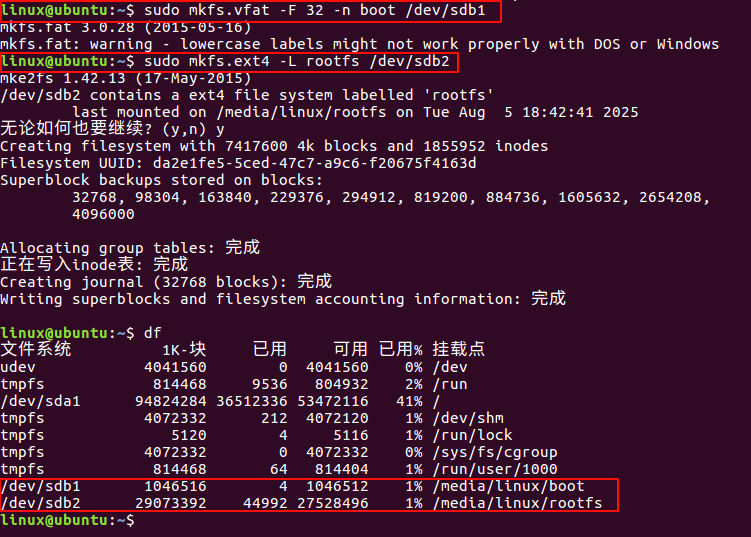
格式化两个分区,sudo mkfs.vfat -F 32 -n boot /dev/sdb1 命令 对第一分区格式化并命名为boot;sudo mkfs.ext4 -L rootfs /dev/sdb2 命令 对第二分区格式化并命名为rootfs。双击ubuntu右侧工具栏的SD卡两个分区图标,实现SD卡挂载。使用df命令可以查看挂载情况。

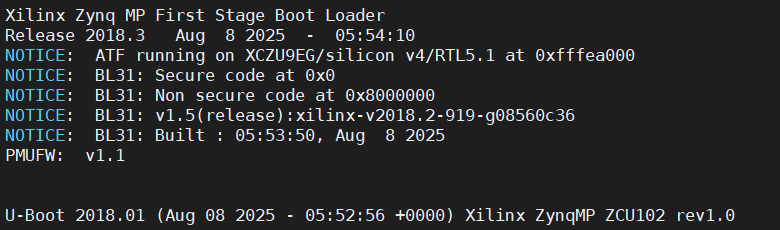
SD卡启动
最终实现SD卡分区,将peatlinux生成的BOOT.bin、image.ub拷贝到第一分区,将rootfs.tar.gz压缩包解压到第二分区,弹出SD卡,将SD卡插入ZYNQ板卡,拨到SD卡启动,最后上电启动。