目录
一、算法原理
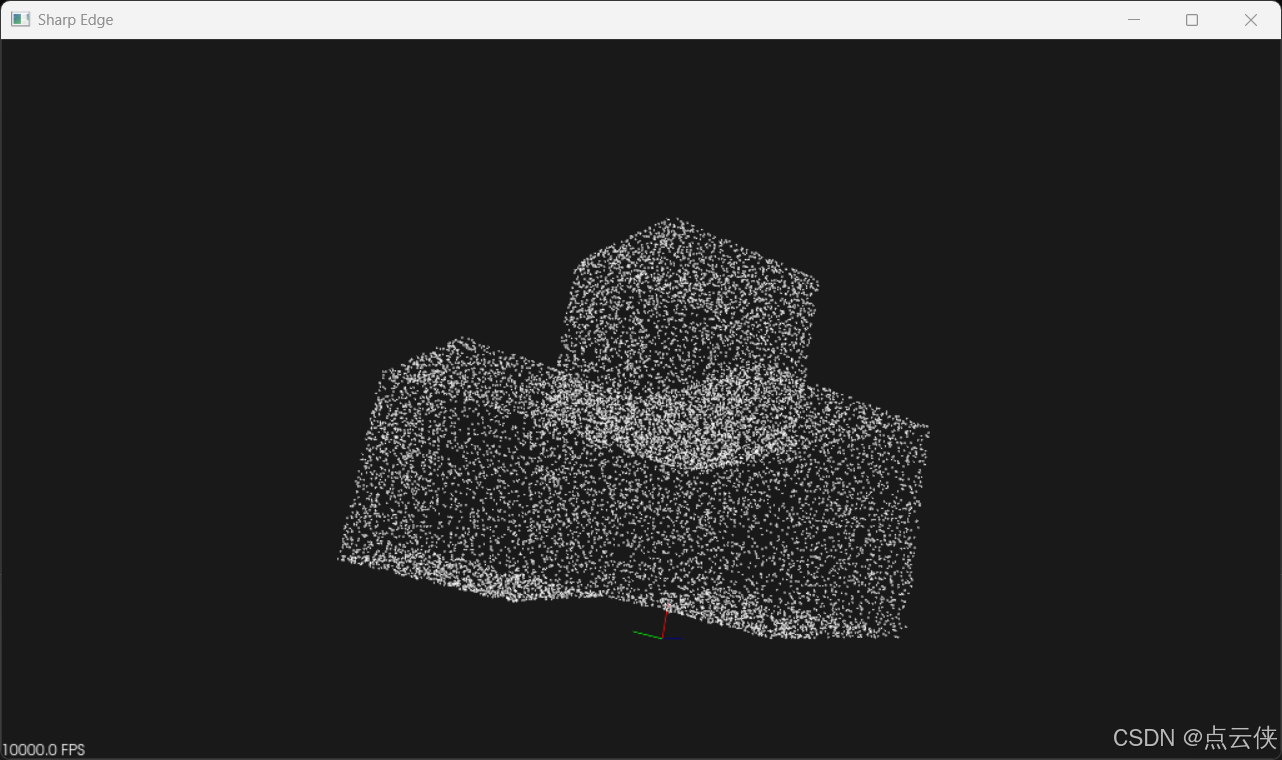
使用PCL库生成一个缺角立方体点云。
二、代码实现
版本一
cpp
#include <iostream>
#include <stdio.h> /* printf, NULL */
#include <stdlib.h> /* srand, rand */
#include "time.h"
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
int
main(int argc, char* argv[])
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
srand(time(NULL));
for (int i = 0; i <= 800; i++) // Cube 10K , 40 ------> For more density CUbe 30K , i<= 120 // Or We Can Make the size of the cube 3 times less , the size of the cube is between 0 and 0.3
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = 0.00;
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = 0.00;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.00;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.25 - 0.00)) + 0.00);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = 0.50;
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 400; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.25 - 0.00)) + 0.00);
basic_point.z = 0.50;
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = 0.50;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.25 - 0.00)) + 0.00);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 400; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.25 - 0.00)) + 0.00);
basic_point.y = 0.50;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.50;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.25 - 0.00)) + 0.00);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 400; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.50;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.25 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 400; i++) // Cube 10K , 40 ------> For more density CUbe 30K , i<= 120 // Or We Can Make the size of the cube 3 times less , the size of the cube is between 0 and 0.3
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.z = 0.25;
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 400; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.y = 0.25;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 400; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.25;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.25)) + 0.25);
basic_point.r = 255;
basic_point.g = 255;
basic_point.b = 255;
cloud->points.push_back(basic_point);
}
cloud->width = (int)cloud->points.size();
cloud->height = 1;
// Show the cloud
pcl::visualization::CloudViewer viewer("Sharp Edge");
viewer.showCloud(cloud);
while (!viewer.wasStopped())
{
}
return 0;
}版本二
cpp
#include <iostream>
#include <stdio.h> /* printf, NULL */
#include <stdlib.h> /* srand, rand */
#include "time.h"
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
int
main(int argc, char* argv[])
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
//1. First Cube
srand(time(NULL));
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.00;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = 0.00;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = 0.50;
cloud->points.push_back(basic_point);
}
// First Cube
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.50;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = 0.50;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = 1.00;
cloud->points.push_back(basic_point);
}
// Second Cube
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.50;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.y = 0.00;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = 0.00;
cloud->points.push_back(basic_point);
}
// Second Cube
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 1.00;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.y = 0.50;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.z = 0.50;
cloud->points.push_back(basic_point);
}
// Third Cube
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.00;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = 0.50;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.z = 0.00;
cloud->points.push_back(basic_point);
}
// Third Cube
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = 0.50;
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = 1.00;
basic_point.z = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
cloud->points.push_back(basic_point);
}
for (int i = 0; i <= 800; i++)
{
pcl::PointXYZRGBA basic_point;
basic_point.x = (((((float)rand()) / (float)RAND_MAX) * (0.50 - 0.00)) + 0.00);
basic_point.y = (((((float)rand()) / (float)RAND_MAX) * (1.00 - 0.50)) + 0.50);
basic_point.z = 0.50;
cloud->points.push_back(basic_point);
}
cloud->width = (int)cloud->points.size();
cloud->height = 1;
std::cout << "Number of points in the input cloud is:" << cloud->points.size() << std::endl;
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].r = 255;
cloud->points[i].g = 255;
cloud->points[i].b = 255;
}
// Show the cloud
pcl::visualization::CloudViewer viewer("Sharp Edge");
viewer.showCloud(cloud);
while (!viewer.wasStopped())
{
}
return 0;
}三、结果展示
版本一结果
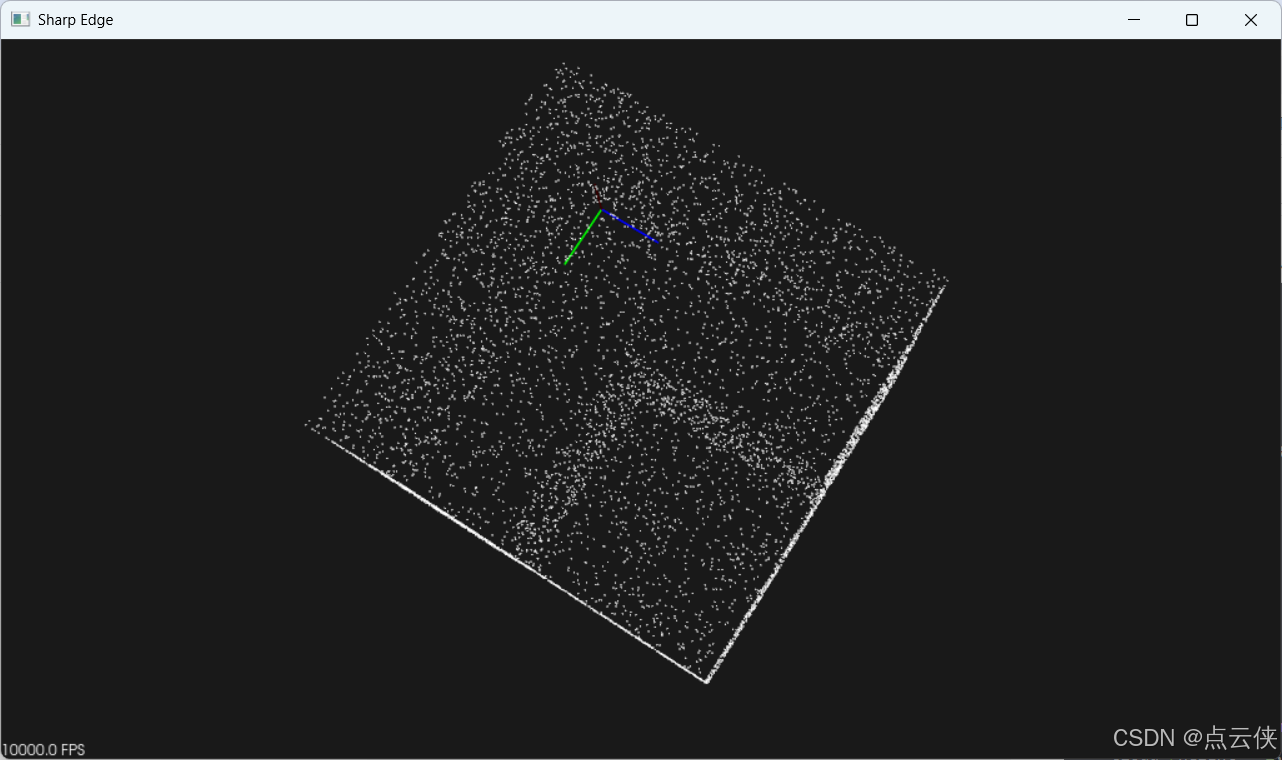
版本二结果