目录
[一. 引言](#一. 引言)
[二. 网络总览](#二. 网络总览)
[三. Mamba Block 的结构](#三. Mamba Block 的结构)
[3.1. SSCS(State Space Channel Swapping)Module](#3.1. SSCS(State Space Channel Swapping)Module)
[3.1.1. Channel swapping](#3.1.1. Channel swapping)
[3.1.2. VSS(Vision State Space)block](#3.1.2. VSS(Vision State Space)block)
[3.1.3. VSS代码分析](#3.1.3. VSS代码分析)
[3.2. DSSF(Dual State Space Fusion)](#3.2. DSSF(Dual State Space Fusion))
一. 引言
该论文是基于Yolov5的改进型红外可见光融合目标检测方法,对于无Yolo和CNN基础的读者可以参考:
笔记:对yolov8网络代码的学习_ultralytics哪个函数将 yaml文件中的backbone: [-1, 1, conv, [-CSDN博客
基于Yolo的图像识别中的特征融合_yolo 特征融合-CSDN博客
代码源: https://github.com/EhanDong/Fusion-Mamba
注:本笔记并非对全文的复述,而是重点对其网络结构和模块(尤其是即插即用算子Mamba Block)进行学习和理解。
二. 网络总览
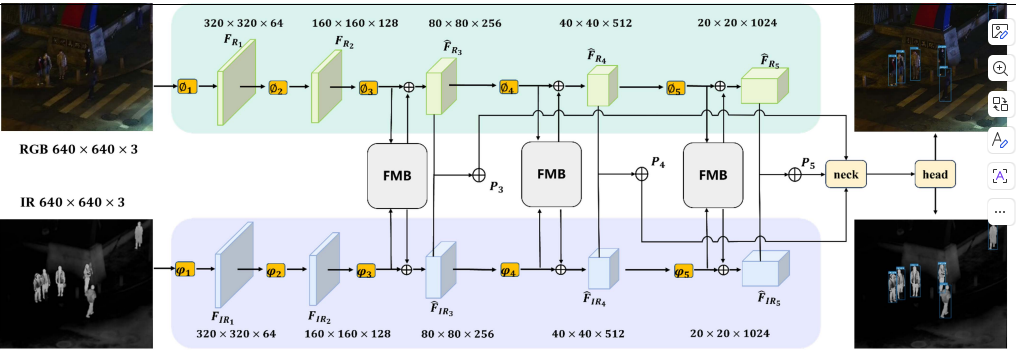
该示意图表示了两个输入RGB(可见光) 和IR(红外光),RGB主要提供纹理 / 语义,IR:主要提供目标 / 轮廓 / 热信息。
两种输入相互独立并采用典型的CNN金字塔style进行采样。当采样到第二层开始,每层采样后都接入Mamba Block进行特征交互,将交互结果接入Neck辅助特征融合,最终进行重构通过head生成检测结果。
三. Mamba Block 的结构

Mamba Block可细分为两大模块,SSCS 和 DSSF 。其中DSSF 堆叠8次在SSCS之后。
3.1. SSCS(State Space Channel Swapping)Module
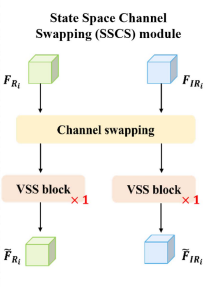
3.1.1. Channel swapping
Channel swapping(通道交换)的本质 是在进入状态空间(Mamba)建模之前,主动打破 RGB / IR 通道的模态纯净性 ,让每一个分支在"还没深度融合之前"就已经携带对方模态的局部表达。
文中给出整体表达式为:
也就是说,假设两个模态的描述某同一目标的特征如下:
则经过swapping后,我们可以得到情况:
注意:这个Swapping不是随机,不是学习到的注意力,而是结构性、可控的通道级重组。
为什么要在浅层做通道交换?
给后续的增强做铺垫,在进入状态空间建模之前,先让 RGB 特征"带一点 IR 的眼睛",让 IR 特征"带一点 RGB 的视角"。
传统方法(不做swapping)会在融合阶段直接进行concat或者进入attention/mamba模块融合,这会使得每个分支仍然保留强烈的模态偏置(强纹理/背景/光照和强目标/热轮廓/前景)。
为什么只换通道而不做attention?
首先要提到Channel Swapping 的三个优点:
- 低开销(只是 split + concat),不会引入额外噪声。
- 不做显式加权,避免伪目标放大,attention可能会在浅层把噪声当目标。
- 为后续 DSSF 的"状态空间融合"做铺垫,SSCS偏引导,DSSF重融合。
3.1.2. VSS(Vision State Space)block
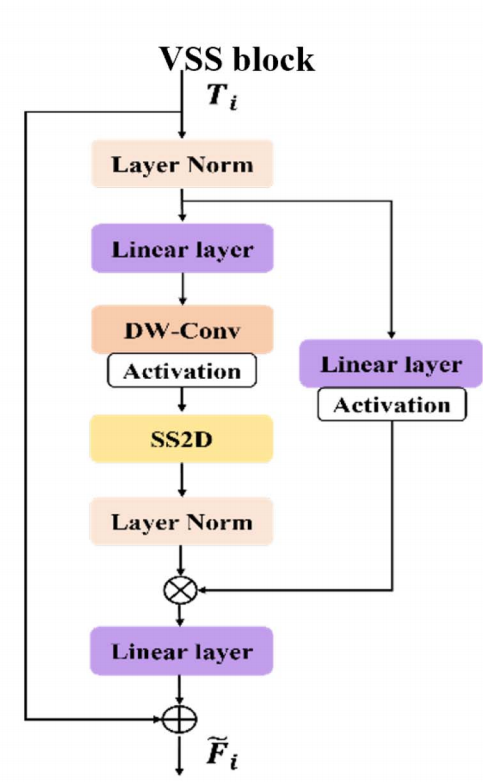
VSS block 是把2D 视觉特征映射到"可控的状态空间序列",并用线性复杂度建模全局依赖的核心算子。在整个模块中负责在状态空间中传播与整合信息。
注意:圈里 "+":残差相加 / 状态融合(additive fusion),圈里 "×":门控调制 / 逐元素缩放(multiplicative gating)
VSS block的输入和输出规模相同 ,但是整体输出时每个位置的特征已经具备 全局感受野。
VSS block的流程可抽象为:
bash
→ LayerNorm
→ Linear projection
→ Depthwise Conv
→ Activation
→ SS2D(核心)
→ LayerNorm
→ Linear projection
→ Residual对每个组件进行逐个解释:
(1)LayerNorm(前)
作用:
稳定状态空间输入
避免不同通道在 SSM 中数值爆炸
这是 状态空间模型的必要前处理。
(2)Linear Projection(前)
作用:
调整通道维度
将 CNN-style feature 映射到 SSM 友好的表示空间
(3)Depthwise Conv(DW-Conv)
这是很多人忽略但非常关键的一步。
作用:
注入 局部空间 inductive bias
补偿 SSM 对局部细节不敏感的问题
这一步保证:
VSS 不是"纯序列模型",而是 视觉友好的状态空间模块。
(4)Activation(激活函数)
提供非线性
为 SSM 的 gating / selective mechanism 做准备
(5)SS2D(核心)
这是 VSS 的重点
这一层:
建模 长程依赖
在 状态空间中传播信息
不显式计算 token-token attention
(6)LayerNorm(后)
(7)Linear Projection(后)
作用:
将状态空间输出重新投影回特征空间
方便后续 residual / fusion
(7)Residual Connection
作用:
保留原始局部信息
防止状态空间过度平滑
功能上 ,VSS 完成了一个 2D→1D→2D 的过程,在这个过程中,二维特征被展开为结构化的一维序列以适配 Mamba 的状态空间建模,并在完成长程信息交互后恢复为二维表示,从而实现与 CNN/YOLO 等二维网络结构的无缝对接。
3.1.3. VSS代码分析
代码见:项目源文件\models\common.py
python
class VSSBlock(nn.Module):
def __init__(
self,
hidden_dim: int = 0, # 通道数 C(该 block 通常接收 NHWC: (B,H,W,C))
drop_path: float = 0, # DropPath 概率(stochastic depth)
norm_layer: Callable[..., torch.nn.Module] = partial(nn.LayerNorm, eps=1e-6), # 归一化层构造器(默认 LN)
attn_drop_rate: float = 0, # SS2D 内部 dropout(作者沿用 attn_drop 命名)
d_state: int = 16, # SSM/Mamba 的状态维度(控制容量/开销)
**kwargs, # 透传给 SS2D 的其它超参(如 expand、d_conv、dt_rank 等)
):
super().__init__()
# Pre-Norm:先归一化再做主算子(稳定训练)
self.ln_1 = norm_layer(hidden_dim)
# 核心模块:SS2D(把 2D 特征序列化后用 selective_scan/Mamba 做状态空间建模,再回到 2D)
self.self_attention = SS2D(
d_model=hidden_dim, # 输入/输出通道
dropout=attn_drop_rate, # dropout 超参
d_state=d_state, # 状态维度超参
**kwargs
)
# DropPath:训练时随机丢弃整条残差分支(正则化)
self.drop_path = DropPath(drop_path)
def forward(self, input: torch.Tensor):
# input: (B, H, W, C) (通常由外部 permute 得到)
d = self.ln_1(input) # LN 归一化(Pre-Norm)
c = self.self_attention(d) # SS2D:全局依赖建模(核心计算)
y = self.drop_path(c) # DropPath 正则
x = input + y # 残差连接(保持信息与梯度稳定)
return x # output: (B, H, W, C)结构上:VSS就是标准化 → 通道映射(非严格降维) → 局部增强 + SSM(DW-Conv + SS2D) → 通道映射回原维度 → 正则化/门控 → 残差。
输入用的是归一化,为什么输出用的是DropPath正则化?
- LN解决的是数值稳定问题
SSM 模型对输入数值尺度非常敏感,如果不同通道或不同位置的特征幅值差异过大,状态递推过程容易出现梯度爆炸或过度衰减,从而导致训练不稳定。
pythonstate_t = f(state_{t-1}, input_t)上面是状态递推的经典形式,如果input大小不一且差别过大,会发生梯度爆炸会发生梯度爆炸或梯度消失,导致隐藏状态在递推过程中数值发散或迅速衰减,从而引起训练不稳定、收敛变慢甚至直接 NaN。
- DropPath 不是"算子",是正则化策略
pythony = DropPath(F(x)) output = x + y训练时:以一定概率直接让
F(x)=0。推理时:DropPath 关闭
本质上是一个随机的结构级门控,作用在残差分支上,通过随机启用/禁用该分支来防止模型过度依赖某个强模块,从而抑制过拟合。
其实在class VSSBlock没有通道映射,也没有完整的核心模块,因此我们看到class SS2D:
python
class SS2D(nn.Module):
def __init__(
self,
d_model, # 输入/输出通道数 C(外部看到的维度)
d_state=16, # SSM 状态维度 N("记忆容量/状态大小")
# d_state="auto", # 可选:自动按 d_model 估计状态维度
d_conv=3, # DW-Conv 的 kernel size(局部建模范围)
expand=2, # 通道扩展倍率(内部维度 d_inner = expand * d_model)
dt_rank="auto", # dt 低秩参数的 rank(控制 dt 参数化容量/开销)
dt_min=0.001, # dt 初始化的最小值(时间步/步长的下界)
dt_max=0.1, # dt 初始化的最大值(时间步/步长的上界)
dt_init="random", # dt 初始化策略(随机/常数等)
dt_scale=1.0, # dt 初始化缩放因子
dt_init_floor=1e-4, # dt 初始化的数值下限(避免过小导致数值问题)
dropout=0., # 输出 dropout 概率(SS2D 末端正则)
conv_bias=True, # DW-Conv 是否带 bias
bias=False, # Linear 的 bias 开关(in/out proj 等)
device=None, # 放到哪个 device
dtype=None, # 参数 dtype
**kwargs, # 预留扩展参数
):
factory_kwargs = {"device": device, "dtype": dtype} # 统一传给层构造函数的设备/精度
super().__init__()
self.d_model = d_model # 记录外部通道维度
self.d_state = d_state # 记录 SSM 状态维度
# self.d_state = ... # auto 逻辑(注释掉的版本)
self.d_conv = d_conv # 记录 DW-Conv kernel size
self.expand = expand # 记录通道扩展倍率
self.d_inner = int(self.expand * self.d_model) # 内部通道维度(通常 > d_model)
self.dt_rank = math.ceil(self.d_model / 16) if dt_rank == "auto" else dt_rank
# dt_rank:自动时随 d_model 增长;否则用你指定的 rank
# 输入投影:把 (C=d_model) 映射到 (2*d_inner)
# 通常用于 split 成两路:一路做主干 x,一路做门控 z(后面会用 silu(z))
self.in_proj = nn.Linear(self.d_model, self.d_inner * 2, bias=bias, **factory_kwargs)
# 深度可分离卷积(DW-Conv):只在各通道内做局部空间卷积,补局部感受野
# groups=self.d_inner => depthwise
self.conv2d = nn.Conv2d(
in_channels=self.d_inner,
out_channels=self.d_inner,
groups=self.d_inner, # depthwise
bias=conv_bias,
kernel_size=d_conv, # 局部窗口大小
padding=(d_conv - 1) // 2, # 保持 H,W 尺寸不变
**factory_kwargs,
)
self.act = nn.SiLU() # 激活函数(门控/非线性常用 SiLU)
# x_proj:为 4 个方向(K=4)各配一套线性投影,用来从特征生成 SSM 所需参数
# 输出维度 = dt_rank + 2*d_state,通常会切成:dt相关 + B + C(SSM参数)
self.x_proj = (
nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs),
nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs),
nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs),
nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs),
)
# 把四个方向的权重堆成一个大参数张量,便于后续一次性计算/加速
# 形状:(K=4, out_dim, d_inner) ------ 代码注释写 (K=4, N, inner) 这里 N 指 out_dim
self.x_proj_weight = nn.Parameter(torch.stack([t.weight for t in self.x_proj], dim=0))
del self.x_proj # 删除 ModuleList/tuple,避免重复注册;保留合并后的权重参数
# dt_projs:4 个方向各一套 dt 的投影层(dt 的低秩参数化)
# dt_init(...) 通常会返回一个 Linear(rank -> d_inner) 或类似结构
self.dt_projs = (
self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),
self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),
self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),
self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),
)
# 同样把四个方向的 dt 投影层参数打包成大张量
# weight: (K=4, d_inner, rank);bias: (K=4, d_inner)
self.dt_projs_weight = nn.Parameter(torch.stack([t.weight for t in self.dt_projs], dim=0))
self.dt_projs_bias = nn.Parameter(torch.stack([t.bias for t in self.dt_projs], dim=0))
del self.dt_projs # 删除原子模块,保留合并参数
# A_logs:SSM 的 A 参数(通常以 log 参数化,保证稳定性/约束)
# copies=4 表示给 4 个方向各复制一份;merge=True 表示合并存储
# 形状注释:(K=4, D, N) 这里 D≈d_inner,N≈d_state(按作者约定)
self.A_logs = self.A_log_init(self.d_state, self.d_inner, copies=4, merge=True)
# Ds:SSM 的 D 参数(skip/残差项或通道缩放项),同样做 4 方向复制并合并
self.Ds = self.D_init(self.d_inner, copies=4, merge=True)
# selective_scan_fn:底层 SSM 扫描算子(这里注释掉,可能在 forward_core 内部调用)
# self.selective_scan = selective_scan_fn
self.forward_core = self.forward_corev0 # 指定核心 forward 实现版本(v0)
self.out_norm = nn.LayerNorm(self.d_inner) # 输出归一化(在投影回 d_model 前稳定数值)
self.out_proj = nn.Linear(self.d_inner, self.d_model, bias=bias, **factory_kwargs) # 回投影:d_inner -> d_model
self.dropout = nn.Dropout(dropout) if dropout > 0. else None # 输出 dropout(可选)定义上,SS2D完成了这些操作:
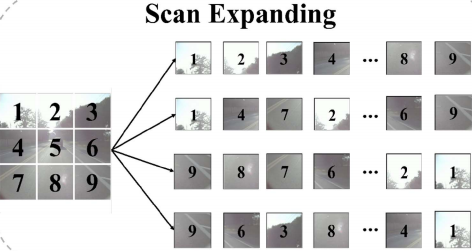
步骤 1:二维 → 多个一维序列
对一个
特征图,沿 四个方向扫描:
左 → 右
右 → 左
上 → 下
下 → 上
得到 4 条 1D 序列:
步骤 2:每条序列独立通过 SSM(Mamba)
对每个方向:
- 使用 Selective State Space Model
- 时间复杂度:
步骤 3:序列 → 2D 特征重建
将 4 个方向的输出重新映射回 2D
做等权融合
最终得到:
代码上,它还包括:
1. 通道扩展与门控 (
in_proj将特征映射到2*d_inner并 split 出主分支/门控分支)2. DW-Conv 的局部增强 (
conv2d提供局部归纳偏置)、为四个方向分别生成 SSM 参数(x_proj_weight/dt_projs_*产生dt,B,C等)3. 稳定性相关参数化 (
A_logs的 log 参数化与D项)4. 输出端的归一化与回投影 (
out_norm+out_proj,可选dropout)
为什么不直接用Mamba?
原始 Mamba / SSM 适用于:
- 1D sequence(NLP)
但视觉特征是:
2D grid
空间邻接关系极强
所以论文引入 SS2D(2D Selective Scan)。
3.2. DSSF(Dual State Space Fusion)
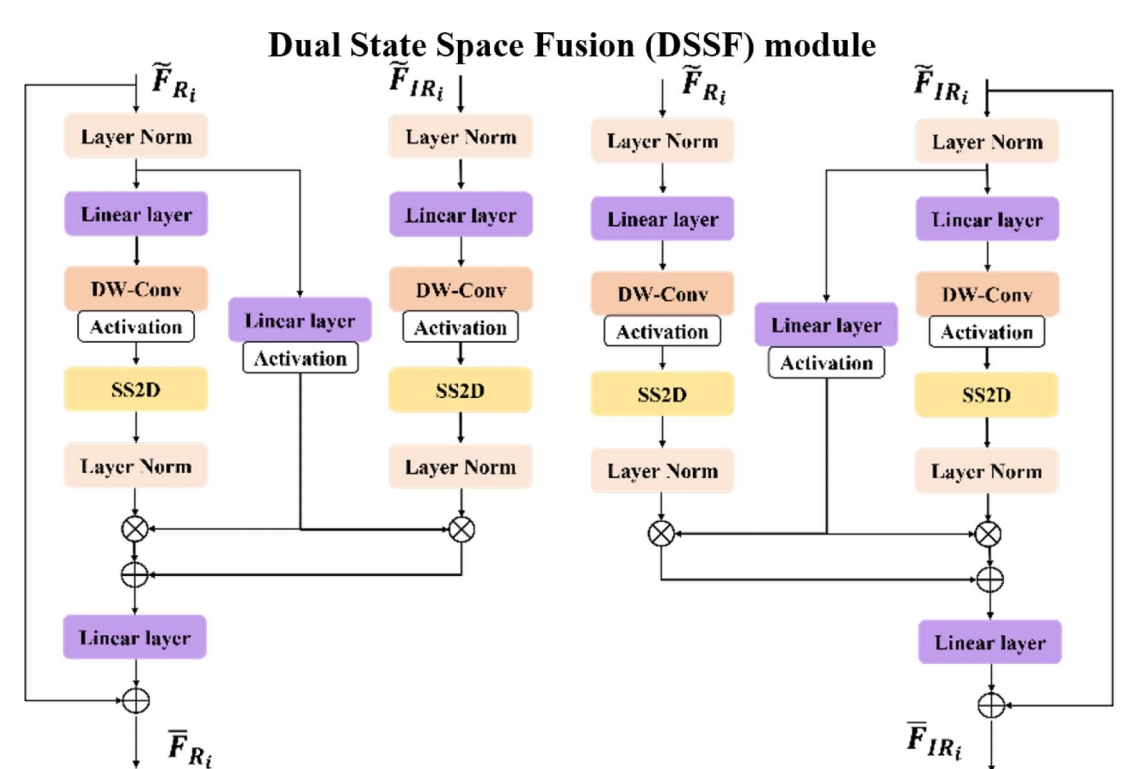
DSSF 的核心结构:两个"VSS-like 分支 + 交叉耦合"
图左边的 DSSF:它其实由两套几乎对称的子结构组成(上面那套处理 RGB,下面那套处理 IR),每套内部都长得像一个 VSS block(LN→Linear→DWConv+Act→SS2D→LN),但关键差异是:
中间有"交叉连接"(cross coupling) :
RGB 分支的某个中间表示会加到 IR 分支,IR 分支的某个中间表示也会加到 RGB 分支。
这就是 "Dual + Fusion" 的本质:双状态空间 + 状态层交互。
每个分支 SS2D 后面都有一个 ⊕,并且这两个 ⊕ 之间用线连起来------这就是"Dual Fusion"。
可以把它理解为:
RGB 分支得到一个"状态增强特征"
IR 分支得到一个"状态增强特征"
简而言之,VSS 是一个基于 Mamba/SSM 的单流全局特征建模模块,用于在不显式计算 attention 的情况下完成长程依赖建模。DSSF 采用双分支状态空间建模策略,分别以 RGB 和 IR 特征作为主干输入 ,并在状态增强阶段引入来自另一模态的辅助信息 ,从而实现对称且受控的跨模态融合。对称的 DSSF 结构确保跨模态融合不依赖于固定的主模态假设,使模型能够在不同场景下自适应地利用 RGB 或 IR 作为主导信息源。
为什么DSSF需要堆叠8次?
如果 只做一次 DSSF:
等价于一次"强跨模态扰动"
很容易:引入伪响应,把噪声直接传播到全局
CrossMamba 的思路是:
少量、多次、逐步地让两种模态在状态空间里互相"影响"
另外,SSM 的优势在"多步传播",不是单步映射。
pythonstate_{t} = f(state_{t-1}, input_t)一次 DSSF ≈ 一次状态更新
多次 DSSF ≈ 多次状态演化
堆叠的意义是:
让跨模态信息在多个状态更新阶段逐渐渗透,而不是一次性对齐。
这对抑制跨模态噪声非常关键。
深度 问题 太浅(1--2) 交互不足,退化为弱融合 中等(4--8) 信息充分传播,训练稳定 过深(>12) 计算重、梯度噪声累积、收益递减