本文档概述了 PX4 自动驾驶仪的架构,描述了其核心组件、组件之间的交互方式以及总体设计理念。此外,还阐述了 PX4 飞行控制系统的软件结构、通信机制、模块系统和执行流程。
系统概述
PX4 是一款基于模块化和组件架构的无人机飞行控制解决方案。该系统设计为高度便携(支持 Linux、NuttX 和 macOS),并适用于不同类型的飞行器,包括多旋翼飞行器、固定翼飞机、垂直起降飞行器、探测车等。
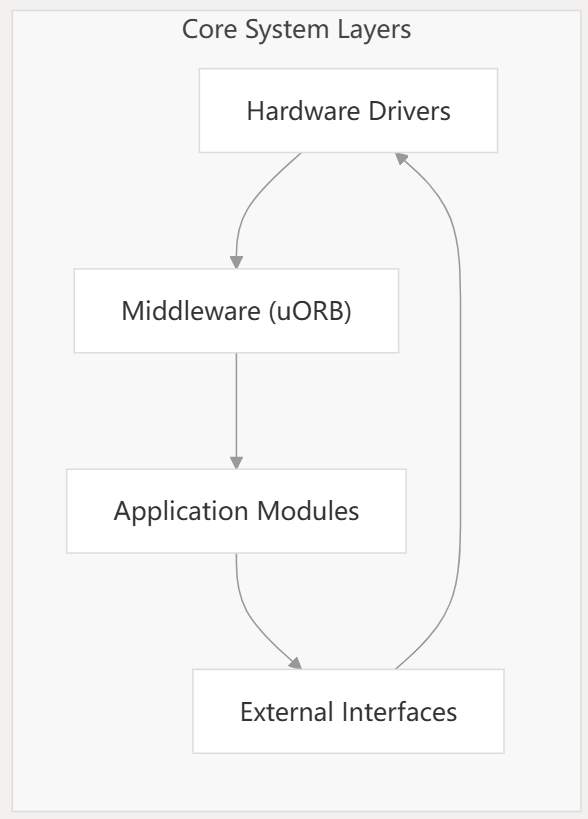
该架构遵循发布-订阅模式,具有明确定义的模块职责和组件之间的标准化接口。
通信架构
PX4 使用两种主要的通信机制:
- uORB(微对象请求代理):用于模块之间的内部通信
- MAVLink:用于与地面站、配套计算机等进行外部通信。
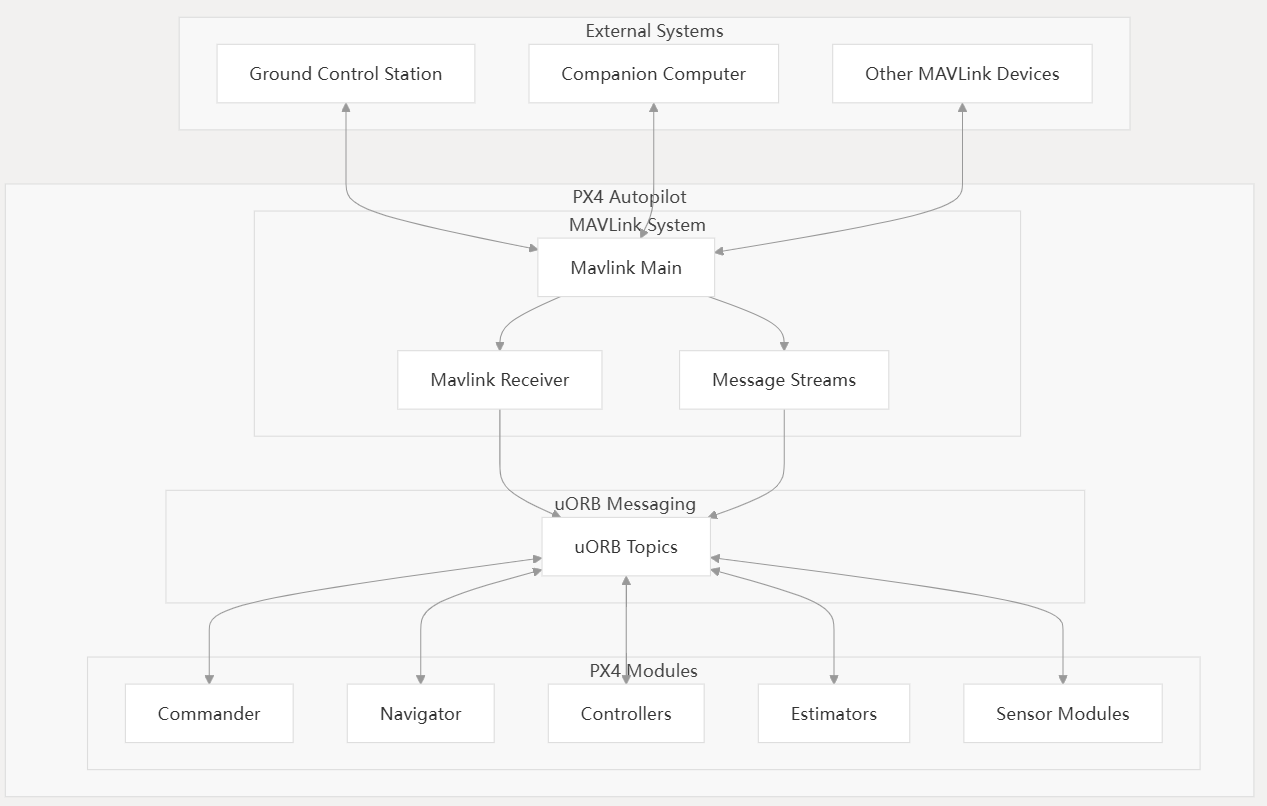
uORB消息系统
uORB 是一个发布-订阅消息系统,构成了 PX4 内部模块间通信的主干。它提供了一种异步通信机制,允许模块之间无需直接依赖即可交换数据。
uORB 的主要特点:
- 基于主题的沟通
- 异步发布-订阅模式
- 快速、低开销的本地消息传递
- 支持多实例主题
消息在目录中定义msg/并在构建时自动生成到 C/C++ 代码中。
MAVLink 通信
MAVLink 模块使用 MAVLink 协议处理外部通信。它在src/modules/mavlink目录中实现,由以下几个组件组成:
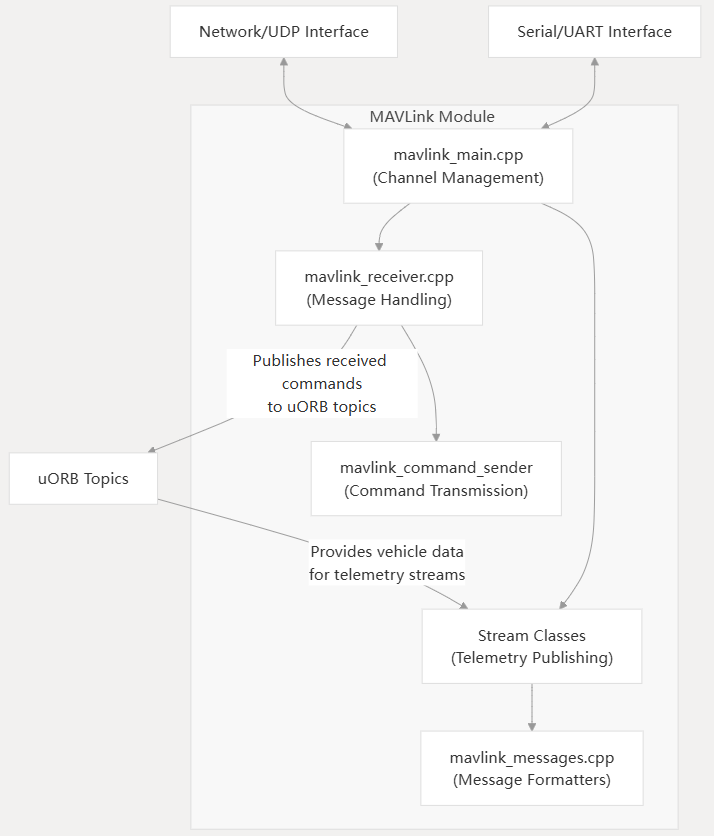
MAVLink 模块具有高度可配置性,针对各种用例具有不同的模式(例如,正常模式、板载模式、OSD 模式)。
模块系统
PX4 的结构由一系列独立的模块组成,每个模块负责特定的功能。这些模块作为独立的任务/线程运行,并通过 uORB 进行通信。
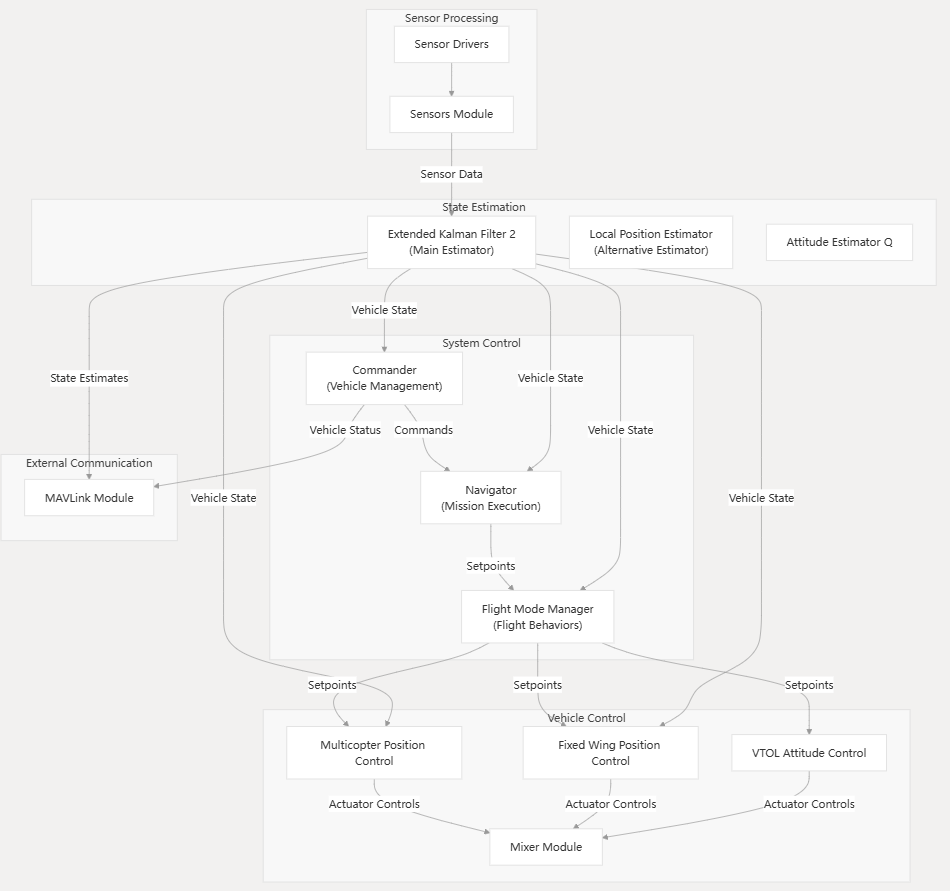
主要模块包括:
- 指挥官:管理车辆状态、模式和安全检查
- 导航器:处理任务执行、RTL、徘徊和其他导航任务
- 飞行模式管理器:管理不同的飞行行为(手动、自动等)
- EKF2:基于扩展卡尔曼滤波器的主要状态估计器
- 控制器:车辆专用控制系统(多旋翼飞行器、固定翼、垂直起降)
- 混合器:将控制信号转换为执行器输出
- MAVLink:通过 MAVLink 协议进行外部通信
系统初始化和启动
PX4 中的启动过程通过初始化脚本进行管理,该脚本按正确的顺序加载参数、启动驱动程序和启动模块。
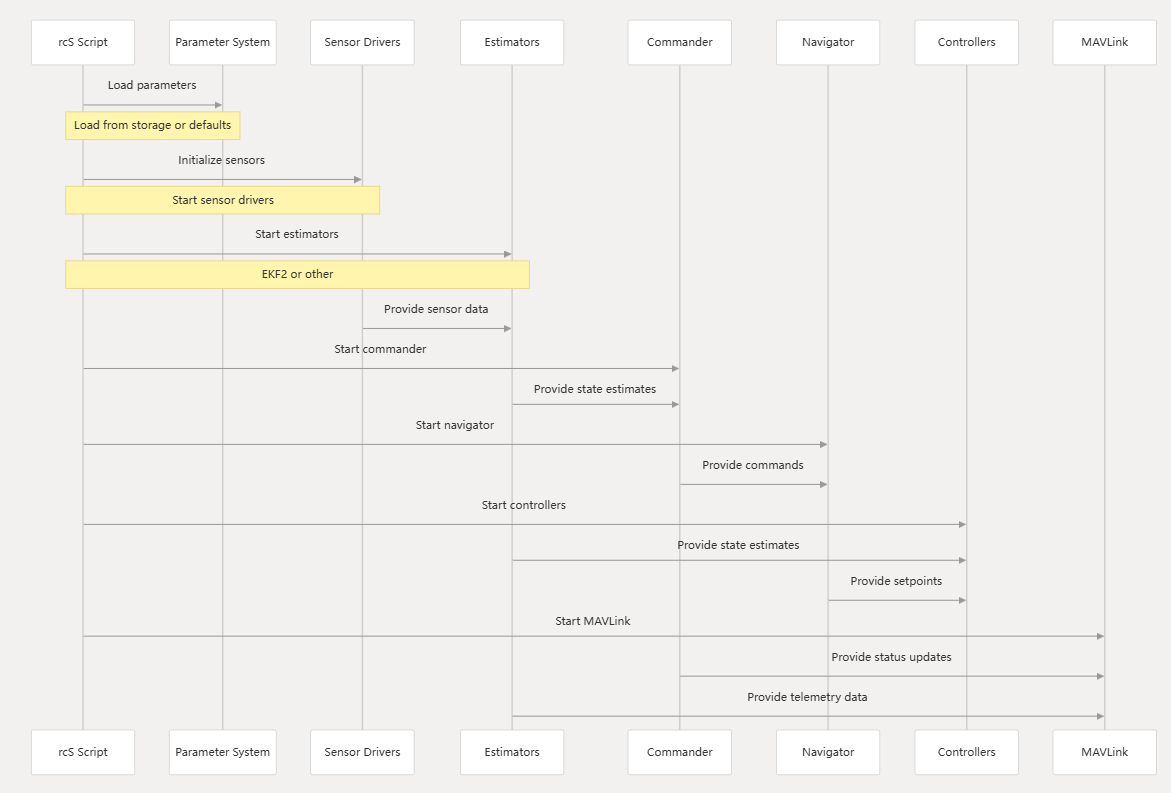
初始化序列在启动脚本中定义:
- NuttX:
ROMFS/px4fmu_common/init.d/rcS - POSIX(模拟):
ROMFS/px4fmu_common/init.d-posix/rcS
启动过程包括:
- 参数加载
- 系统配置
- 传感器初始化
- 状态估计器启动
- 控制器初始化
- 通信系统启动
参数系统
PX4 使用参数系统来持久存储配置值。参数在代码中定义,可以通过地面站或编程进行修改。
参数系统提供:
- 重启后持久存储
- 类型检查和值验证
- 自动参数版本控制
- 不同车辆类型的默认值
根据硬件平台,参数存储在 SD 卡或闪存上的文件中。
构建系统
PX4 使用 CMake 作为其构建系统,允许它:
- 为多个平台构建(NuttX、Linux、macOS)
- 从模板生成必要的文件
- 为不同的车辆类型和硬件配置构建
- 处理依赖项和编译选项
构建系统组织如下:
msg/从文件生成消息定义- 创建模块配置
- 编译特定于平台的代码
- 将所有内容链接到最终的可执行文件中
硬件抽象
PX4 提供硬件抽象层,使软件可跨不同平台移植:
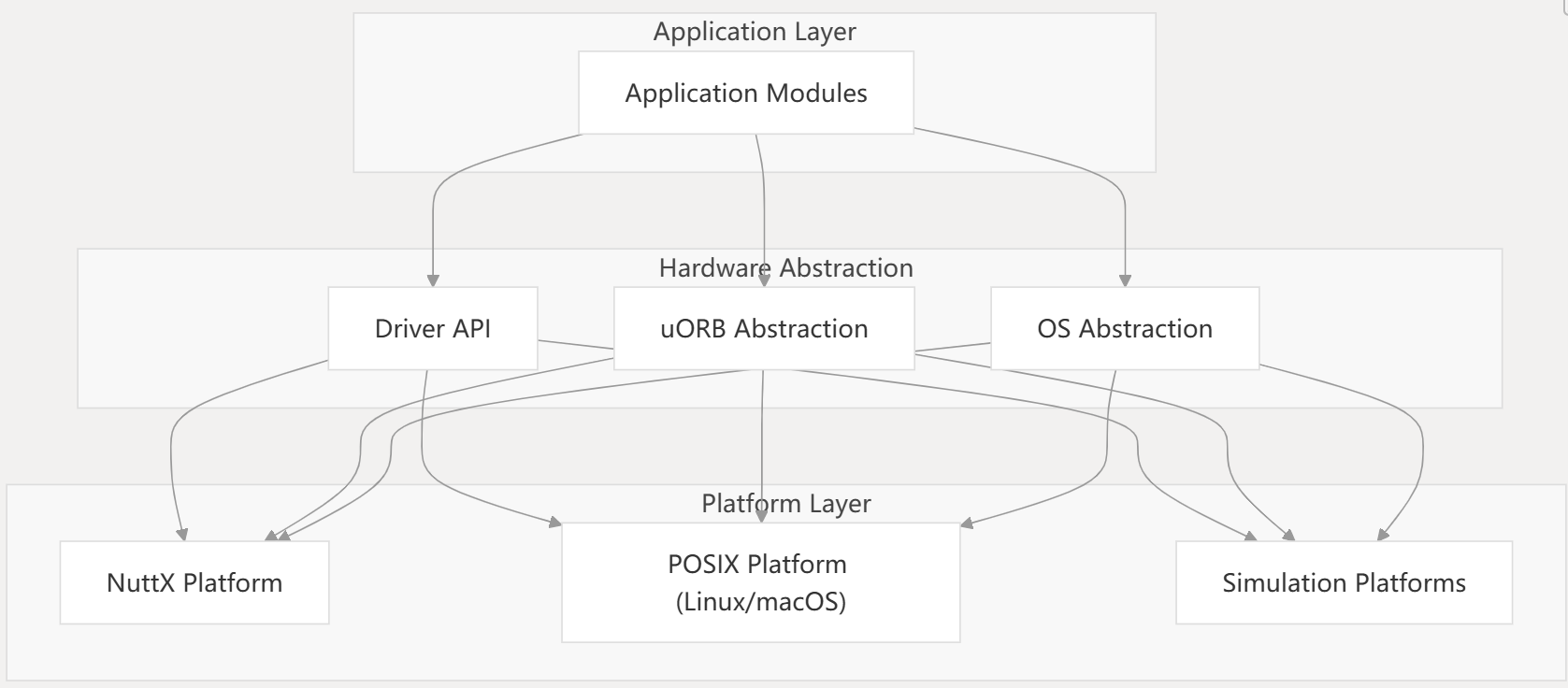
这种分层架构允许 PX4 运行在:
- 嵌入式微控制器(通过 NuttX RTOS)
- 台式计算机(通过 POSIX 层)
- 模拟环境(SITL - 软件在环)
概括
PX4 架构是一个模块化、基于组件的系统,其构建基础如下:
- 用于内部通信的中间件层(uORB)
- 用于外部接口的 MAVLink 协议
- 特定功能的独立模块
- 可移植性的平台抽象层
- 配置参数系统
这种架构使 PX4 能够支持多种车辆类型、硬件平台和用例,同时保持一致、强大的飞行控制系统。