01图像处理概览
一、计算机视觉与数字图像处理
计算机视觉的概念→人的视觉所感知的周围环境是三维结构, 而计算机中的图像是二维的。 计算机视觉就是 研究如何让计算机像人一样" 看" 的科学。 形象地说, 就是给计算机安装上眼睛( 照相 机) 和大脑( 算法) , 让计算机能够感知环境。
图像处理的三个层次:
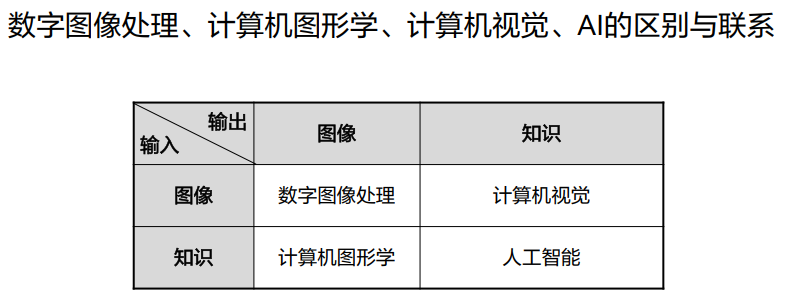
低级图像处理内容( 图像处理)内容:主要对图象进行各种加工以改善图象的视觉效果、或突出有用信 息,并为自动识别打基础,或通过编码以减少对其所需存储空间、传输 时间或传输带宽的要求。特点:输入是图像,输出也是图像,即图像之间进行变换。
中级图像处理( 图像分析) 内容:主要对图像中感兴趣的目标进行检测(或分割)和测量,以获得 它们的客观信息,从而建立对图像中目标的描述,是一个从图像到数值 或符号的过程。特点:输入是图像,输出是数据。
高级图像处理( 图像理解)内容:在中级图像处理的基础上,进一步研究图像中各目标的性质和它 们之间相互的联系,并得出对图像内容含义的理解(对象识别)及对原来客观场景的解释(计算机视觉),从而指导和规划行动。特点:输入是数据,输出是理解。
二、计算机视觉的任务与应用
任务:图像分类、目标检测、图像分割、图像生成、超分辨率 、风格迁移、图像修复。
应用:场景分析、智能相册、疫情防控。
三、数字图像处理基础
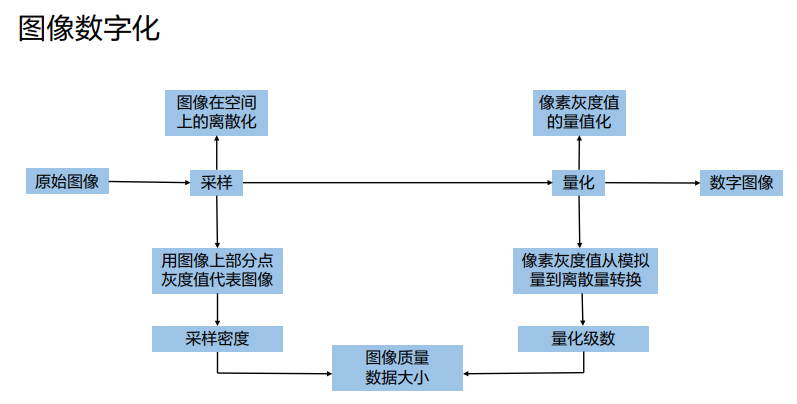
采样: 将空间上连续的图像变化为离散的点。
图像分辨率: 采样后得到离散图像的尺寸。 分辨率由宽( Width) 和高( Height) 两个参数构成。 宽表示水平方向的细节数, 高表示垂直方向的细节数。
采样与分辨率的关系: 采样间隔越小, 所得图像像素数越多, 空间分辨率高, 图像质量好, 但数 据量大。例如:一幅分辨率为640*480的图像,表示这幅图像由640*480=307200个点组成。 一幅分辨率为1920*1080的图像,表示这幅图像由1920*1080= 2073600个点组成。
量化: 将采样点的传感器信号转换成离散的整数值。
灰度级( Gray Level Scale) : 量化后得到离散图像的每个采样点的变化范围。 通常用𝑚𝑚级或者𝑛𝑛 位来表示灰度级, 一般是2的整数次幂。 图像数据的灰度级越多视觉效果就越好, 计算机中最常用的是8位图像。
量化与灰度级的关系: 量化等级越多, 所得图像层次越丰富, 灰度分辨率高, 图像质量好, 但数据量大。例如:一幅8位的图像,每个采样点从最暗到最亮,可以分辨28=256个级别。
对于计算机来说, 图像是一个由数字组成的巨大的矩阵。灰度图, 都只有一个通道, 单通道记录 了像素点的亮度信息, 每个数字都是在范围0-255之间的整型, 0表示最暗( 黑色) , 255表示最 亮( 白色) 。
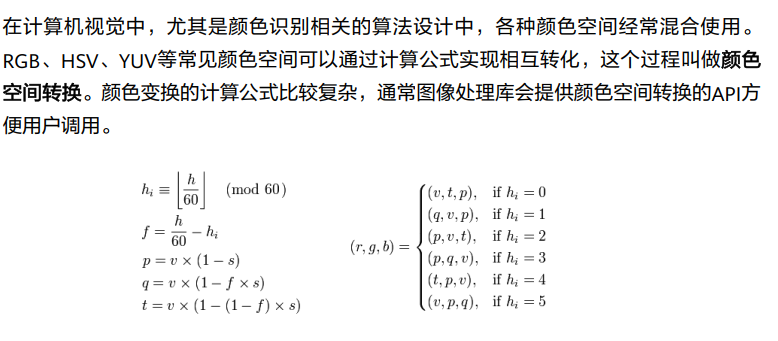
对于彩色图片, 更普遍的表达方式是RGB颜色模型。 RGB颜色空间中每个像素点有三个维度, 分别记录在红( Red) 、 绿( Green) 、 蓝( Blue) 三原色分量上的亮度。
HSV也是常用的颜色空间之一, 该颜色空间可以用一个 圆锥来表示。 " H"表示色相( Hue),颜色的相位角, 取值范围是0到 360度。" S"表示颜色饱和度( Saturation),取值范围是从0到1, 它表示成所选颜色的纯度和该颜色最大的纯度之间的比率。" V"表示色彩的明亮程度( Value),取值范围是从0到1。与HSV类似的颜色空间还有: HSL( Hue Saturation Lightness )HIS( Hue Saturation Intensity)
YUV颜色空间由亮度信号" Y"和两个色差信号" R- Y"、" B- Y" 组成。 YUV色彩空间的重 要性是它的亮度信号" Y"和色度信号" U"、" V"是分离的。如果只有信号分量" Y" 就可 以表示黑白灰度图。 YUV颜色空间主要用于图像压缩及传输。
CMYK颜色空间应用于印刷工业, 印刷业通过青(" C")、品红(" M")、黄(" Y")、 黑(" K")四色油墨的不同网点面积率的叠印来表现丰富多彩的颜色和阶调。
Lab的色彩空间要比RGB模式和CMYK模式的色彩空间大,自然界中任何颜色都可以在Lab空间 中表达出来。
像素( Pixel) : 数字图像中的每一个采样 点 。 像 素 的 数 据 维 度 被 称 为 通道 ( Channel) 。
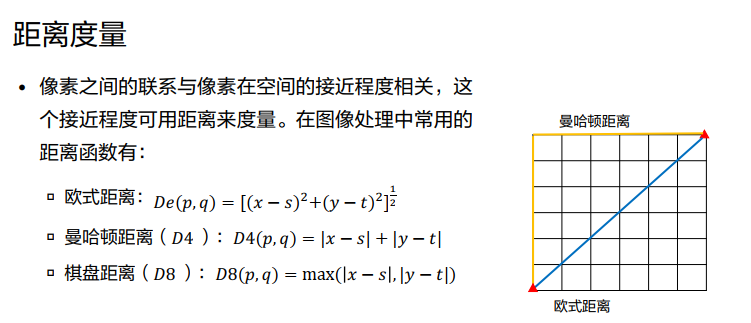
像素可以由它在图像中的位置坐标( 𝑥𝑥,𝑦𝑦) 来描述。 根据坐标, 像素之间具备一些空间位置关系。
4-邻域 (4-Neighbors): 对于坐标(𝑥𝑥, 𝑦𝑦)的像素𝑝𝑝, 𝑝𝑝有 四个水平和垂直方向上的4个相邻像素,其坐标分别为 (𝑥𝑥 + 1, 𝑦𝑦), (𝑥𝑥 − 1, 𝑦𝑦), (𝑥𝑥, 𝑦𝑦 + 1), (𝑥𝑥, 𝑦𝑦 − 1), 这组像 素中的每个像素距离𝑝𝑝一个单位距离,称为像素𝑃𝑃的4 邻域,用𝑁𝑁4(𝑝𝑝) 表示。
对角邻域 (Diagonal Neighbors): 对于坐标(𝑥𝑥, 𝑦𝑦)的 像素𝑝𝑝在两个对角方向上的4个相邻像素,其坐标分别 为(𝑥𝑥 + 1, 𝑦𝑦 + 1), (𝑥𝑥 + 1, 𝑦𝑦 − 1) , (𝑥𝑥 − 1, 𝑦𝑦 − 1) , (𝑥𝑥 − 1, 𝑦𝑦 + 1),这组像素称为像素𝑝𝑝的对角邻域,用 𝑁𝑁D(𝑝𝑝) 表示。
8-邻域 (8-Neighbors): 像素𝑃𝑃的4邻域和对角邻域合 起来称为8邻域, 用𝑁𝑁8(𝑝𝑝)表示。
如果两个像素不仅空间位置上邻接, 并且其像素值 也符合相似准则, 我们称这两个像素是连接的。像素值的相似准则: 指像素的灰度值相等, 或者像 素值都在一个灰度集合𝑉𝑉中。两种常用的连接: 4-连接: 像素𝑝𝑝, 𝑞𝑞都在𝑉𝑉中取值,且𝑞𝑞在𝑝𝑝的4-邻域中,称它们是4- 连接。8-连接: 像素𝑝𝑝, 𝑞𝑞都在𝑉𝑉中取值,且𝑞𝑞在𝑝𝑝的8-邻域中,称它们是8- 连接。
像素连通可以看做像素连接的一种推广。 如果像素 𝑝𝑝和像素𝑡𝑡可以通过两两连接的像素进行关联, 则𝑝𝑝 和𝑡𝑡是连通的。 所有关联的像素称为𝑝𝑝、 𝑡𝑡之间的通路。例如: 𝑝𝑝和𝑞𝑞是连接的, 𝑞𝑞和𝑟𝑟是连接的, 𝑟𝑟和𝑠𝑠是连接 的, 𝑠𝑠和𝑡𝑡是连接的, 则𝑝𝑝和𝑡𝑡是连通的, 𝑝𝑝𝑞𝑞𝑟𝑟𝑠𝑠𝑡𝑡是一条 通路。按照连接方式, 连通分为4-连通和8-连通。 上图中 𝑝𝑝𝑞𝑞𝑟𝑟𝑠𝑠𝑡𝑡是8-连通, 但不是4-连通。
在一副图像中, 一个像素集合内部两两连通, 并和集合外部的像素都不连通, 这样的像 素集合被称为连通域。 根据连接的不同定义, 连通域同样分为4-连通域, 8-连通域。连通域的边界称为区域边界或轮廓。