
本文所展示的程序通过线性回归(Linear Regression)和基于方差的最优加权融合 的方法,对水下常用的两种导航传感器------**超短基线定位系统(USBL)和多普勒计程仪(DVL)**的测量数据进行相互补偿和优化,以提高水下定位的精度。
文章目录
程序要点
程序旨在通过线性回归(Linear Regression)和加权融合 的方法,对水下常用的两种导航传感器------**超短基线定位系统(USBL)和多普勒计程仪(DVL)**的测量数据进行相互补偿和优化,以显著提高水下定位的精度。
主要功能点:
-
真实轨迹生成与传感器数据模拟:
- 模拟一条圆形加直线的复杂真实轨迹,作为真值(Ground Truth)。
- 根据传感器特性,分别生成带有误差的USBL和DVL测量数据。
- USBL误差模型 :包含较大的随机噪声、系统偏差 和尺度误差(模拟声学多径和传感器安装误差)。
- DVL误差模型 :包含随机噪声、累积漂移 (积分误差)和尺度误差。
-
数据补偿:
- USBL补偿 :利用DVL数据(经过平滑处理以减少噪声)作为参考,通过线性回归模型校正USBL的系统偏差 和尺度误差。
- DVL补偿 :利用USBL数据(经过强滤波以减少噪声)作为参考,通过拟合并去除DVL数据的线性累积漂移,然后进行微调。
-
卡尔曼滤波式融合(最优加权):
- 在补偿后的USBL和DVL数据的基础上,通过计算各自的方差(不确定度) ,采用基于方差的最优加权方法进行融合,以得到最终的优化定位结果。
-
结果分析与可视化:
- 计算并打印原始数据、补偿后数据 和融合结果 的均值、标准差、RMSE、95%分位数等详细的定位误差统计特性。
- 计算USBL、DVL和融合结果相较于原始数据的误差改善率。
- 提供多组图表进行直观对比:
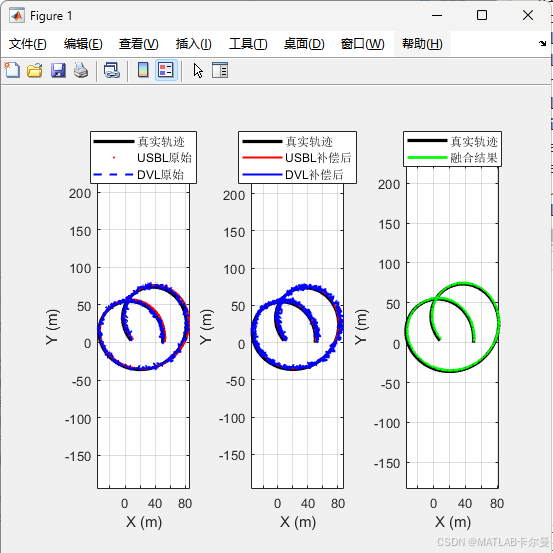
- 原始轨迹、补偿后轨迹和融合轨迹的对比图。
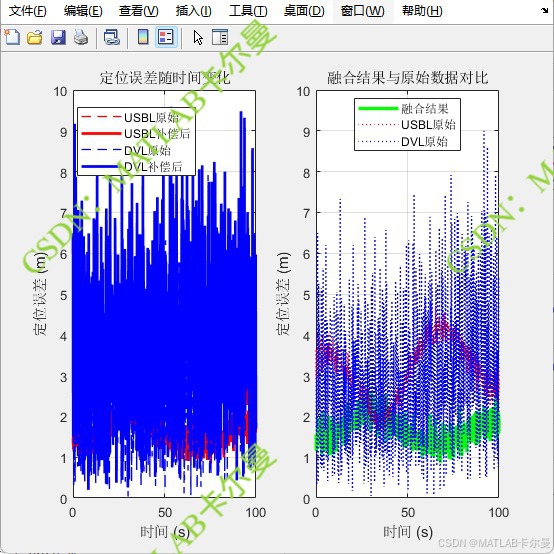
- 定位误差随时间变化的曲线图。
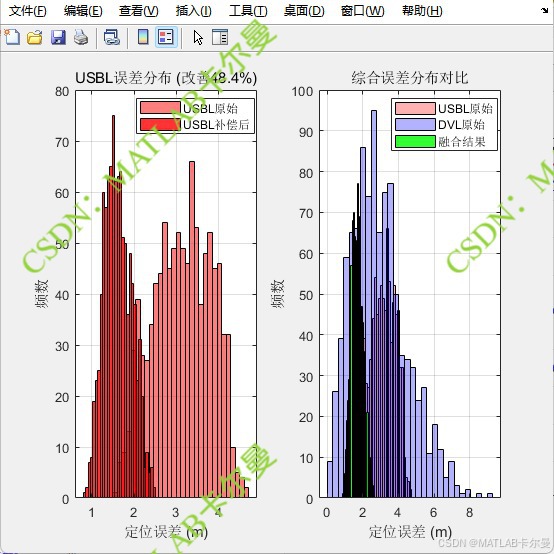
- 误差分布的直方图。
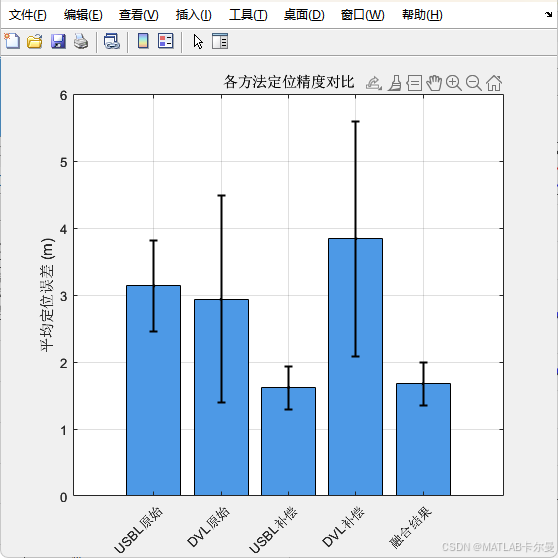
- 各方法平均定位误差的柱状图。
适用场景:
水下潜水器(如AUV/ROV)的后处理导航 或实时导航算法验证。特别是在水下环境复杂,USBL易受多径影响(噪声大、有偏差),而DVL易产生累积漂移的场景下,用于提高系统的整体定位精度。
运行结果
轨迹对比:
误差对比:
误差分布情况:
误差均值与标准差图像:
MATLAB源代码
完整代码如下:
matlab
%% USBL和DVL数据线性回归补偿程序
% 功能:对USBL和DVL导航数据进行相互补偿,提高定位精度
% 作者: matlabfilter
% 2025-10-12/Ver1
clear; close all; clc;
rng(0);
%% 参数设置
dt = 0.1; % 采样时间间隔 (s)
t_total = 100; % 总时间 (s)
t = 0:dt:t_total; % 时间向量
N = length(t); % 数据点数
%% 生成真实轨迹(圆形+直线)
omega = 0.1; % 角速度
radius = 50; % 圆半径
x_true = radius * cos(omega * t) + 0.5 * t;
y_true = radius * sin(omega * t) + 0.3 * t;
%% 生成USBL和DVL测量数据(符合实际传感器特性)
% USBL误差模型:较大随机噪声 + 系统偏差(受声学多径影响)
usbl_noise_scale = 0.2;完整代码的下载链接:
https://download.csdn.net/download/callmeup/92114650
或前往专栏查看更多完整代码(粘贴到MATLAB空脚本中即可直接运行):
https://blog.csdn.net/callmeup/article/details/153126168?spm=1011.2415.3001.5331
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者